电梯以及控制装置的制作方法
1.本发明涉及电梯以及控制装置。
背景技术:
2.专利文献1公开了电梯的例子。电梯具备借助于驱动绳轮以及主绳索使轿厢行驶的永磁同步电机。在电梯故障时,有可能发生乘客被困在轿厢内部的情况。在被困的乘客的救援运转中,轿厢被动态制动器(dynamic brake)制动,该动态制动器是永磁同步电机的三相电线借助阻抗短接而实现的。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2000-143115号公报
技术实现要素:
6.然而,在专利文献1的电梯中,在发生使三相电线短接的触点的接触不良等的情况下,通过动态制动器实现的轿厢制动有可能无法有效地发挥功能。这时,在救援运转中,轿厢有可能会以过剩的速度来行驶。
7.本发明是为了解决这样的课题而完成的。本发明提供能够抑制救援运转中的轿厢的过剩速度的电梯以及控制装置。
8.本发明的电梯具备:电机,其是由三相交流电驱动的永磁同步电机;驱动绳轮,其与所述电机的旋转轴联动地进行旋转;制动装置,其通过绕挂在所述驱动绳轮上的主绳索来保持所述驱动绳轮所承受的轿厢的载荷;驱动装置,其向所述电机输出驱动所述电机的三相交流电;电流检测器,其检测流过连接所述驱动装置以及所述电机的三相电线的电流;电磁接触器,其在比所述电流检测器靠所述驱动装置侧的位置具有能够使所述三相电线短接的触点;速度检测部,其根据在所述电磁接触器使所述三相电线短接时所述电流检测器检测出的电流来检测所述驱动绳轮的旋转速度;以及救援运转部,其在救援运转中所述速度检测部检测出的旋转速度超过预先设定的速度阈值时,使所述制动装置对所述驱动绳轮进行制动,所述救援运转是在发生了乘客被困于所述轿厢的内部的情况时,使所述轿厢移动到所述乘客能够下梯的楼层的停层位置的运转。
9.本发明的电梯具备:电机,其是由三相交流电驱动的永磁同步电机;驱动绳轮,其与所述电机的旋转轴联动地进行旋转;制动装置,其通过绕挂在所述驱动绳轮上的主绳索来保持所述驱动绳轮所承受的轿厢的载荷;驱动装置,其向所述电机输出驱动所述电机的三相交流电;电流检测器,其检测流过连接所述驱动装置以及所述电机的三相电线的电流;电磁接触器,其在比所述电流检测器靠所述驱动装置侧的位置具有能够使所述三相电线短接的触点;短接判定部,其根据在所述电磁接触器使所述三相电线短接时所述电流检测器检测出的电流,在流过所述三相电线的三相电流的三相各相电流值的绝对值相加得到的值不超过预先设定的电流阈值时,判定为通过所述电磁接触器实现的短接无效;以及救援运
转部,其在救援运转中所述短接判定部持续地判定为通过所述电磁接触器实现的短接无效的时间超过预先设定的时间阈值时,使所述制动装置对所述驱动绳轮进行制动,其中,所述救援运转是在发生了乘客被困于所述轿厢的内部的情况时,使所述轿厢移动到所述乘客能够下梯的楼层的停层位置的运转。
10.本发明的控制装置是应用于如下的电梯的控制装置,所述电梯具有:电机,其是由三相交流电驱动的永磁同步电机;驱动绳轮,其与所述电机的旋转轴联动地进行旋转;制动装置,其通过绕挂在所述驱动绳轮上的主绳索来保持所述驱动绳轮所承受的轿厢的载荷;驱动装置,其向所述电机输出驱动所述电机的三相交流电;电流检测器,其检测流过连接所述驱动装置以及所述电机的三相电线的电流;以及电磁接触器,其在比所述电流检测器靠所述驱动装置侧的位置具有能够使所述三相电线短接的触点,其中,所述控制装置具备:速度检测部,其根据在所述电磁接触器使所述三相电线短接时所述电流检测器检测出的电流来检测所述驱动绳轮的旋转速度;以及救援运转部,其在救援运转中所述速度检测部检测出的旋转速度超过预先设定的速度阈值时,使所述制动装置对所述驱动绳轮进行制动,其中,所述救援运转是在发生了乘客被困于所述轿厢的内部的情况时,使所述轿厢移动到所述乘客能够下梯的楼层的停层位置的运转。
11.本发明的控制装置是应用于如下的电梯的控制装置,所述电梯具有:电机,其是由三相交流电驱动的永磁同步电机;驱动绳轮,其与所述电机的旋转轴联动地进行旋转;制动装置,其通过绕挂在所述驱动绳轮上的主绳索来保持所述驱动绳轮所承受的轿厢的载荷;驱动装置,其向所述电机输出驱动所述电机的三相交流电;电流检测器,其检测流过连接所述驱动装置以及所述电机的三相电线的电流;以及电磁接触器,其在比所述电流检测器靠所述驱动装置侧的位置具有能够使所述三相电线短接的触点,其中,所述控制装置具备:短接判定部,其根据在所述电磁接触器使所述三相电线短接时所述电流检测器检测出的电流,在流过所述三相电线的三相电流的三相各相电流值的绝对值相加得到的值不超过预先设定的电流阈值时,判定为通过所述电磁接触器实现的短接无效;以及救援运转部,其在救援运转中所述短接判定部持续地判定为通过所述电磁接触器实现的短接无效的时间超过预先设定的时间阈值时,使所述制动装置对所述驱动绳轮进行制动,其中,所述救援运转是在发生了乘客被困于所述轿厢的内部的情况时,使所述轿厢移动到所述乘客能够下梯的楼层的停层位置的运转。
12.发明效果
13.如果是本发明的电梯或控制装置,则能够抑制救援运转中的轿厢的过剩速度。
附图说明
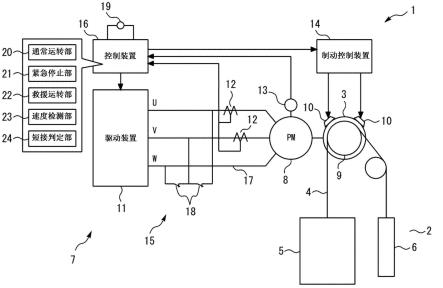
14.图1是实施方式1的电梯的结构图。
15.图2是示出实施方式1的短接判定部进行的短接有效性判定的例子的图。
16.图3是示出实施方式1的短接判定部进行的短接有效性判定的例子的图。
17.图4是实施方式1的电梯的主要部分的硬件结构图。
18.标号说明
19.1:电梯;2:井道;3:曳引机;4:主绳索;5:轿厢;6:对重;7:控制系统;8:电机;9:驱动绳轮;10:制动装置;11:驱动装置;12:电流检测器;13:编码器;14:制动控制装置;15:电
磁接触器;16:控制装置;17:三相电线;18:常闭触点;19:线圈;20:通常运转部;21:紧急停止部;22:救援运转部;23:速度检测部;24:短接判定部;100a:处理器;100b:存储器;200:专用硬件。
具体实施方式
20.参照附图对用于实施本发明的方式进行说明。在各图中,对相同或者相当的部分标注相同的标号,适当简化或者省略重复的说明。
21.实施方式1.
22.图1是实施方式1的电梯1的结构图。
23.电梯1应用于具有多个楼层的建筑物。在建筑物中设有电梯1的井道2。井道2是跨越多个楼层的、在上下方向上较长的空间。电梯1具备曳引机3、主绳索4、轿厢5、对重6以及控制系统7。
24.曳引机3具备电机8、驱动绳轮9以及制动装置10。电机8是由三相交流电驱动的永磁同步电机。驱动绳轮9是与电机8的旋转轴联动地旋转的绳轮。制动装置10是对驱动绳轮9进行制动的装置。制动装置10例如利用通过弹簧等的弹力将制动靴按压于与驱动绳轮9联动地旋转的制动面而产生的摩擦力对驱动绳轮9进行制动。制动装置10在释放驱动绳轮9时,例如通过利用电磁铁衔拾电枢而使制动靴离开制动面。
25.主绳索4是绕挂在驱动绳轮9上的绳索。主绳索4在驱动绳轮9的一侧支承轿厢5的载荷。主绳索4在驱动绳轮9的另一侧支承对重6的载荷。因此,驱动绳轮9通过主绳索4在一侧承受轿厢5的载荷导致的转矩。此外,驱动绳轮9通过主绳索4在另一侧承受对重6的载荷导致的转矩。即,驱动绳轮9通过主绳索4承受轿厢5以及对重6的不平衡载荷导致的转矩。不平衡载荷是由于轿厢5的载荷以及对重6的载荷的不平衡而产生的载荷。另外,轿厢5的载荷包含轿厢5的承载载荷。
26.轿厢5是通过在井道2中沿上下方向行驶而在多个楼层之间输送乘客的装置。对重6是在与轿厢5之间取得施加于驱动绳轮9的载荷的平衡的装置。轿厢5以及对重6通过由电机8所产生的驱动力实现的驱动绳轮9的旋转以及主绳索4的移动而在井道2中向彼此相反的方向行驶。轿厢5在通常运转时行驶到各个楼层的停层位置进行停靠。各个楼层的停层位置是乘客能够在该楼层处乘降轿厢5的位置。
27.控制系统7是控制电梯1的运行的系统。控制系统7具备驱动装置11、电流检测器12、编码器13、制动控制装置14、电磁接触器15以及控制装置16。
28.驱动装置11是向电机8输出驱动电机8的三相交流电的装置。驱动装置11利用三相电线17与电机8连接。驱动装置11通过三相电线17向电机8供给电力。
29.电流检测器12是检测流过三相电线17的电流的设备。在该例子中,电流检测器12检测流过三相电线17中的u相及v相的电线的电流。这时,流过三相电线17中的w相的电线的电流例如根据三相电流之和为0的关系式等间接地被检测出。
30.编码器13设置于曳引机3的电机8。编码器13是检测电机8的旋转角的设备。编码器13也可以根据电机8的旋转角的时间变化来检测电机8的旋转速度。
31.制动控制装置14是控制制动装置10的制动及释放的动作的装置。制动控制装置14例如通过向制动装置10的电磁铁供电而使制动装置10释放驱动绳轮9。制动控制装置14例
如通过停止对制动装置10的电磁铁的供电而使制动装置10对驱动绳轮9进行制动。在此,制动控制装置14与从驱动装置11向电机8的供电独立地进行对制动装置10的供电。即,即使在驱动装置11发生了异常的情况下,制动控制装置14也能够控制制动装置10的动作。
32.电磁接触器15是动态制动器用连接器。电磁接触器15具有常闭触点18以及线圈19。常闭触点18是在闭合时使三相电线17短接的触点。常闭触点18在比电流检测器12靠驱动装置11侧的位置使三相电线17短接。常闭触点18例如借助阻抗使三相电线17短接。在该例子中,常闭触点18使三相电线17中的u相和w相的电线、以及v相和w相的电线的各组短接。线圈19是根据输入对常闭触点18进行开闭的元件。线圈19在被输入了打开指令时打开常闭触点18。线圈19在未被输入指令时使常闭触点18闭合。
33.控制装置16是控制电梯1的运行的装置。控制装置16具备通常运转部20、紧急停止部21、救援运转部22、速度检测部23以及短接判定部24。
34.通常运转部20是对多个楼层之间的轿厢5的行驶等电梯1的通常运转进行控制的部分。在通常运转期间,通常运转部20通过将打开指令输入到电磁接触器15的线圈19而打开常闭触点18。因此,在通常运转期间,三相电线17不发生短接。通常运转部20在使轿厢5行驶时,通过制动控制装置14使制动装置10释放驱动绳轮9。通常运转部20根据基于编码器13的输出的电机8的旋转速度、以及基于电流检测器12的输出的电流值,通过驱动装置11使电机8驱动。这时,轿厢5通过由电机8所产生的驱动力实现的驱动绳轮9的旋转以及主绳索4的移动而行驶到任意楼层的停靠位置。在轿厢5到达停靠位置时,通常运转部20通过驱动装置11使电机8停靠。在轿厢5停靠在停层位置时,通常运转部20通过制动控制装置14使制动装置10对驱动绳轮9进行制动。这时,制动装置10保持驱动绳轮9所承受的不平衡载荷。
35.紧急停止部21是对异常发生时等的电梯1的紧急停止进行控制的部分。在电梯1中发生的异常例如包括由于驱动装置11的故障而导致无法再进行电机8的驱动的状况等。在紧急停止时,紧急停止部21通过制动控制装置14使制动装置10对驱动绳轮9进行制动。此外,在紧急停止时,通常运转部20通过停止向电磁接触器15的线圈19的指令的输入而使常闭触点18闭合。由此,三相电线17短接。当在三相电线17短接时电机8的旋转轴由于不平衡载荷等的转矩而旋转时,电机8作为发电机起作用而产生感应电动势。通过由于该感应电动势而流过的电流与永久磁铁的磁场之间的相互作用而在电机8产生制动力。即,产生动态制动器的制动力。
36.在此,在由于紧急停止而使得乘客正乘坐的轿厢5所停止的位置不是任何楼层的停层位置的情况下,会发生乘客被困于轿厢5内部的情况。这时,要进行救援运转,使轿厢5移动到被困在所乘坐的轿厢5中的乘客能够下梯的楼层的停层位置。乘客能够下梯的楼层例如是轿厢5所停止的位置的最近楼层等。救援运转部22是控制如下的救援运转的部分,所述救援运转自动进行,不需要电梯1的维护人员等专业技术人员的手动操作。
37.速度检测部23是如下部分:根据在三相电线17短接时电流检测器12检测出的电流来检测驱动绳轮9的旋转速度。在此,电机8作为发电机起作用时的感应电动势的频率与和驱动绳轮9联动的电机8的旋转轴的旋转速度成比例。因此,速度检测部23能够不依赖于编码器13等在通常运转时检测电机8的旋转角或旋转速度的设备,而根据电流检测器12检测出的电流的频率来检测电机8及驱动绳轮9的旋转速度。即,速度检测部23即使在编码器13发生了故障的情况下,也能够检测驱动绳轮9的旋转速度以及通过驱动绳轮9的旋转而行驶
的轿厢5的行驶速度。
38.短接判定部24是如下部分:根据在三相电线17短接时电流检测器12检测出的电流来判定通过电磁接触器15实现的短接是否有效。在此,在发生常闭触点18的接触不良的情况时等,三相电线17有可能不能有效地短接。在三相电线17不能有效地短接的情况下,在三相电线17中不流过电流,因此不会产生动态制动器的制动力。另一方面,如果三相电线17有效地短接,则在电机8的旋转轴旋转时,在三相电线17中会流过电流,因此,短接判定部24能够在电流检测器12检测出的电流小于预先设定的基准时,判定为通过电磁接触器15实现的短接无效。
39.救援运转部22例如如下所述来进行救援运转。
40.救援运转部22通过制动控制装置14使制动装置10释放驱动绳轮9。由此,驱动绳轮9由于轿厢5以及对重6的不平衡载荷的转矩而旋转。这时,与驱动绳轮9联动的电机8的旋转轴也旋转,因此,由于三相电线17短接而产生动态制动器的制动力。因此,轿厢5会以不平衡载荷以及动态制动器的制动力取得平衡的恒定的速度行驶。救援运转部22在轿厢5到达乘客能够下梯的楼层的停层位置时,例如利用制动装置10的制动力等使轿厢5停靠。由此,被困的乘客能够从轿厢5下梯。
41.另一方面,在由于轿厢5的承载载荷较大而导致不平衡载荷超过动态制动器的制动力的最大值的情况时等,轿厢5的速度不恒定而增速。因此,救援运转部22根据速度检测部23的检测结果来监视驱动绳轮9的旋转速度。救援运转部22在驱动绳轮9的旋转速度超过速度阈值时,通过制动控制装置14使制动装置10对驱动绳轮9进行制动。速度阈值例如是与救援运转中的轿厢5的速度上限对应地预先设定的旋转速度的阈值。
42.在此,在轿厢5未到达停层位置的情况下,救援运转部22在利用制动装置10的制动力使轿厢5停止之后,通过制动控制装置14使制动装置10释放驱动绳轮9。由此,轿厢5再次行驶。之后,在驱动绳轮9的旋转速度再次超过速度阈值时,救援运转部22通过制动控制装置14使制动装置10再次对驱动绳轮9进行制动。救援运转部22通过这样反复进行制动装置10的释放以及制动,即使在轿厢5的承载载荷较大的情况时等,也能够在不超过轿厢5的速度上限的范围内进行救援运转。
43.此外,由于在常闭触点18的一部分发生接触不良,从而有可能导致通过电磁接触器15实现的短接部分地变得无效。例如,在三相电线17中,u相和w相的电线、或者v相和w相的电线的任意一组的短接有可能变得无效。即使在该情况下,由于也流过单相的感应电流,因此会部分地产生动态制动器的制动力。这时,速度检测部23根据单相的感应电流的频率来检测驱动绳轮9的旋转速度。因此,救援运转部22即使在由于动态制动器的制动力是一部分而导致轿厢5增速的情况下,也能够在不超过轿厢5的速度上限的范围内进行救援运转。
44.此外,由于在常闭触点18发生接触不良而有可能导致通过电磁接触器15实现的短接变得无效。例如,在三相电线17中,u相和w相的电线、以及v相和w相的电线这两组的短接有可能变得无效。这时,由于在三相电线17中未流过感应电流,因此速度检测部23无法再监视驱动绳轮9的旋转速度。因此,救援运转部22要根据短接判定部24的判定结果来监视通过电磁接触器15实现的短接的有效性。救援运转部22在开始救援运转时,使短接判定部24开始短接是否有效的判定。另外,救援运转部22也可以在使制动装置10对驱动绳轮9进行制动的期间,使短接判定部24对短接的有效性的判定停止。救援运转部22计测短接判定部24持
续地判定为通过电磁接触器15实现的短接无效的时间。救援运转部22在计测出的时间超过时间阈值时,通过制动控制装置14使制动装置10对驱动绳轮9进行制动。时间阈值例如是与在动态制动器的制动力不发挥功能的情况下、增速的轿厢5的速度达到救援运转中的速度上限的时间对应地预先设定的时间阈值。
45.在此,在轿厢5未到达停层位置的情况下,救援运转部22也可以在轿厢5由于制动装置10的制动力而停止之后,通过制动控制装置14使制动装置10释放驱动绳轮9。由此,轿厢5再次行驶。之后,在短接判定部24持续地判定为短接无效的时间再次超过时间阈值时,救援运转部22通过制动控制装置14使制动装置10再次对驱动绳轮9进行制动。通过这样反复进行制动装置10的释放以及制动,救援运转部22即使在由于接触不良等而导致通过电磁接触器15实现的短接无效的情况下,也能够在不超过轿厢5的速度上限的范围内进行救援运转。
46.或者,救援运转部22也可以在短接判定部24持续地判定为短接无效的时间超过时间阈值时,中止自动进行的救援运转。这时,被困的乘客例如通过电梯1的维护人员等专业技术人员的操作等而被救援。
47.接着,使用图2及图3对短接判定部24进行的短接的有效性判定的例子进行说明。
48.图2及图3是示出实施方式1的短接判定部24进行的短接的有效性判定的例子的图。
49.在图2及图3中,横轴表示时间。在图2及图3中,纵轴表示电流的大小。
50.在图2中,示出不平衡载荷与流过短接了的三相电线17的感应电流之间的关系。曲线a以及曲线b表示互不相同的不平衡载荷施加于驱动绳轮9时的感应电流的时间变化的例子。与曲线b对应的不平衡载荷小于与曲线a对应的不平衡载荷。曲线a例如与轿厢5的承载载荷偏离了平衡负荷的状态对应。曲线b例如与轿厢5的承载载荷接近平衡负荷的状态对应。如图2所示,不平衡载荷越小,驱动绳轮9的旋转速度越小,因此,感应电流的波形的峰值及频率均较小。即,在不平衡载荷较小的情况下,电流检测器12检测出的感应电流的电流值为0附近的时间变长。因此,在根据三相电流中的任意单独的相的电流值来判定短接的有效性时,在不平衡载荷较小的情况下,即使实际上短接有效,也有可能被判定为短接无效。因此,短接判定部24如下所述来判定短接的有效性,以使得即使在不平衡载荷较小的情况下也能够更可靠地进行判定。
51.在图3中,示出由电流检测器12检测出的感应电流的各相的绝对值的时间变化的例子。在此,w相电流iw例如利用u相电流iu和v相电流iv,并根据三相电流之和为0的关系式iu+iv+iw=0等而间接地被检测出。如图3所示,虽然各相电流值为0附近的时间较长,但是三相各相电流值的绝对值相加得到的值|iu|+|iv|+|iw|在偏离0的一定的范围内发生变化。因此,短接判定部24在三相各相电流值的绝对值相加得到的值超过电流阈值i
th
时,判定为通过电磁接触器15实现的短接有效。在此,电流阈值i
th
例如是预先设定的用于判定有无流过被短接的三相电线17的感应电流的电流阈值。另一方面,短接判定部24在该相加得到的值不超过电流阈值i
th
时,判定为通过电磁接触器15实现的短接无效。由此,短接判定部24即使在不平衡载荷较小且感应电流的波形的周期相对于时间阈值较长的情况时等,也能够更可靠地判定短接的有效性。
52.如以上进行了说明的那样,实施方式1的电梯1具备电机8、驱动绳轮9、制动装置
10、驱动装置11、电流检测器12、电磁接触器15以及控制装置16。电机8是由三相交流电驱动的永磁同步电机。驱动绳轮9与电机8的旋转轴联动地旋转。制动装置10保持驱动绳轮9所承受的不平衡载荷等轿厢5的载荷。驱动装置11向电机8输出驱动电机8的三相交流电。电流检测器12检测流过三相电线17的电流。三相电线17连接驱动装置11以及电机8。电磁接触器15在比电流检测器12靠驱动装置11侧的位置具有能够使三相电线17短接的常闭触点18。控制装置16具备速度检测部23、短接判定部24以及救援运转部22。速度检测部23根据在电磁接触器15使三相电线17短接时电流检测器12检测出的电流来检测驱动绳轮9的旋转速度。短接判定部24根据在电磁接触器15使三相电线17短接时电流检测器12检测出的电流来判定有无通过电磁接触器15实现的短接。短接判定部24在流过三相电线17的三相电流的三相各相电流值的绝对值相加得到的值不超过预先设定的电流阈值时,判定为通过电磁接触器15实现的短接无效。救援运转是在发生了乘客被困于轿厢5内部的情况时,使轿厢5移动到乘客能够下梯的楼层的停层位置的电梯1的运转。救援运转部22在救援运转中,在速度检测部23检测出的旋转速度超过预先设定的速度阈值时,使制动装置10对驱动绳轮9进行制动。救援运转部22在救援运转中,在短接判定部24持续地判定为通过电磁接触器15实现的短接无效的时间超过预先设定的时间阈值时,使制动装置10对驱动绳轮9进行制动。
53.通过这样的结构,根据在电磁接触器15使三相电线17短接时电流检测器12检测出的电流来监视轿厢5的速度过剩的状况。该状况例如包括轿厢5的增速以及电磁接触器15处的接触不良等。救援运转部22根据监视到的状况而使制动装置10对驱动绳轮9进行制动,因此,能够抑制救援运转中的轿厢5的过剩的速度。此外,速度检测部23根据三相电线17短接时所流过的电流来检测驱动绳轮9的旋转速度。因此,救援运转部22即使在编码器13或驱动装置11发生了故障的情况下,也能够一边监视驱动绳轮9的旋转速度一边进行救援运转。此外,救援运转部22即使在动态制动器的制动力不发挥功能的情况下,也在轿厢5的速度达到救援运转中的速度上限之前使制动装置10对驱动绳轮9进行制动。因此,救援运转部22即使在电磁接触器15发生接触不良等的情况下,也能够在不超过轿厢5的速度上限的范围内进行救援运转。
54.此外,救援运转部22在救援运转中,在使驱动绳轮9对制动装置10进行制动之后,使驱动绳轮9释放制动装置10。救援运转部22在速度检测部23检测出的旋转速度再次超过预先设定的速度阈值时,使制动装置10再次对驱动绳轮9进行制动。救援运转部22通过这样的驱动绳轮9的释放以及制动的反复进行而使轿厢5移动到停层位置。
55.根据这样的结构,即使在不平衡载荷相对于动态制动器的制动力较大的情况时等,也能够在不超过轿厢5的速度上限的范围内进行救援运转。
56.另外,也可以是,救援运转部22在救援运转中由短接判定部24持续地判定为通过电磁接触器15实现的短接无效的时间超过时间阈值时,中止救援运转。
57.根据这样的结构,在未产生动态制动器的制动力的情况下,由救援部进行的自动救援运转中止。这时,被困于轿厢5的乘客通过维护人员等专业技术人员一边确认轿厢5的移动一边进行的手动救援运转而被救援。
58.另外,控制装置16也可以仅具备速度检测部23或短接判定部24中的任意一方。这时,救援运转部22仅根据速度检测部23的检测结果或短接判定部24的判定结果中的任意一方来进行救援运转。此外,控制装置16也可以在编码器13或驱动装置11等正常地发挥功能
的情况下,根据从编码器13或驱动装置11等取得的信息来监视驱动绳轮9的旋转速度。
59.此外,电梯1也可以是基于与图1所示的绕绳不同方式的绕绳实现的牵引式电梯。此外,电梯1也可以是不具有对重的卷筒式电梯。
60.接着,使用图4对电梯1的硬件结构的例子进行说明。
61.图4是实施方式1的电梯1的主要部分的硬件结构图。
62.例如,控制装置16等中的电梯1的各功能能够通过处理电路来实现。处理电路具备至少1个处理器100a和至少1个存储器100b。处理电路具备处理器100a以及存储器100b,或者作为它们的替代,也可以具备至少1个专用硬件200。
63.在处理电路具备处理器100a和存储器100b的情况下,电梯1的各功能通过软件、固件、或者软件与固件的组合来实现。软件以及固件中的至少一方被记述为程序。该程序被存储于存储器100b。处理器100a通过读出并执行存储于存储器100b的程序来实现电梯1的各功能。
64.处理器100a也称为cpu(central processing unit:中央处理单元)、处理装置、运算装置、微处理器、微型计算机、dsp。存储器100b例如由ram、rom、闪存、eprom、eeprom等非易失性或易失性的半导体存储器等构成。
65.在处理电路具备专用硬件200的情况下,处理电路例如通过单一电路、复合电路、编程处理器、并行编程处理器、asic、fpga或者它们的组合来实现。
66.电梯1的各功能能够分别通过处理电路来实现。或者,电梯1的各功能也能够统一通过处理电路来实现。关于电梯1的各功能,也可以通过专用硬件200来实现一部分,通过软件或固件来实现其他部分。这样,处理电路通过专用硬件200、软件、固件或者它们的组合来实现电梯1的各功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1