载物架及含该载物架的移动式顶升输送机的制作方法
1.本技术涉及搬运领域,尤其涉及一种载物架及含该载物架的移动式顶升输送机。
背景技术:
2.自主移动机器人已经得到广泛应用,例如,应用于物流搬运、拣货等。当搬运货物时,自主移动机器人先将货物抬起后,按照规划的路线移动至指定地点,再借由一堆高机将货物抬升至不同的高度,以适应货物放置于不同的载物台面上。堆高机需要人工操作,自主移动机器人需要与堆高机合作搬运货物,这种搬运方式没有实现自动化。
技术实现要素:
3.有鉴于此,有必要提供一种能够安装于一移动机器人上的载物架,实现货物搬运的自动化。
4.本技术提出一种载物架,包括支撑机构、升降机构、第一检测件和控制器;支撑机构包括至少一个入口,且能够连接一移动机器人上;升降机构包括升降驱动件和承载件,所述升降驱动件设置于所述支撑机构上,所述承载件设置于所述升降驱动件上,所述升降驱动件用于驱动所述承载件上升或下降;第一检测件设置于所述承载件上,且位于所述入口的前方,用于检测待搬运的货物的位置;控制器设置于所述支撑机构上,且分别与所述升降驱动件、所述第一检测件和所述移动机器人通讯连接。其中,上述载物架安装于移动机器人上,移动机器人能够带动载物架移动,载物架通过第一检测件得出用于放置货物的承载台的高度,并反馈至控制器,控制器控制升降驱动件驱动承载件上升合适的位移,使货物在承载件与承载台之间平稳地传送,传送结束后,控制器控制升降驱动件驱动承载件回位,升降驱动件能够驱动承载件移动不同的位移,以适应放置在不同高度的承载台上的货物的搬运,无需借助堆高机将货物放置在不同高度的承载台上,实现了自动化搬运货物。
5.根据本技术的一些实施例,所述载物架还包括第二检测件,所述第二检测件包括第一感测件和第二感测件,所述第一感测件和所述第二感测件间隔地设置于所述承载件上,且所述第一感测件位于所述第二感测件背离所述入口的一侧,所述第一感测件反馈与所述货物接触的信号至所述控制器,所述第二感测件反馈与所述货物脱离的信号至所述控制器。其中,第一感测件能够反馈货物全部承载于承载件上的信息至控制器,移动机器人通过控制器得知该信息,并开始带动载物架移动,进一步提高了搬运的自动化。第二感测件能够反馈货物离开承载件时,移动至一安全位置的信息至控制器,控制器再控制升降驱动件驱动承载件回位,进一步提高了搬运的自动化,进一步地,提高了搬运的效率以及搬运的安全性。
6.根据本技术的一些实施例,所述载物架还包括防护机构,所述防护机构包括移动驱动件和止挡件,所述移动驱动件设置于所述承载件上,所述止挡件设置于所述移动驱动件上,并位于多个所述承载件朝向所述入口的一侧,所述移动驱动件与所述控制器通讯连接,且能够驱动所述止挡件上升或下降。其中,防护机构通过移动驱动件与控制器通讯连
接,使载物架对货物的防护自动化,提高了载物架的安全性。
7.根据本技术的一些实施例,所述承载件包括承载主体、传送驱动件和多个滚筒,多个所述滚筒转动地承载于所述承载主体上,并与所述传送驱动件连接,所述传送驱动件设置于所述承载主体上,且能够驱动多个所述滚筒滚动。其中,滚筒转动将驱使货物在承载件上移动,使货物在承载件和承载台之间的传送实现自动化。
8.根据本技术的一些实施例,所述支撑机构上设有多个连接孔,多个所述连接孔能够与不同的所述移动机器人通过紧固件连接。其中,支撑机构能够与不同的移动机器人通过紧固件连接,进而提高载物架的通用化。
9.根据本技术的一些实施例,所述升降驱动件包括旋转驱动件、第一减速器、第二减速器、第一连接杆和螺杆;所述第一减速器和第二减速器分别间隔地设置于所述支撑机构上,且位于所述承载件的周侧;所述第一减速器设有第一轴;所述旋转驱动件与所述第一减速器连接,并驱动所述第一轴同步转动;所述螺杆地设置于所述承载件上,且螺接所述第二减速器,所述第二减速器设有第二轴;所述第一连接杆的两端分别止转连接所述第一轴和所述第二轴。其中,通过第一减速器的第一轴带动第一连杆以及第二减速器的第二轴转动,通过第二减速器与螺杆螺接,使第二螺母与螺杆啮合传动,螺杆带动承载件移动,进而实现升降驱动件驱动承载件上升或下降的功能。
10.根据本技术的一些实施例,所述升降驱动件还包括第三减速器和第二连接杆;所述第二减速器的数量为两个,所述第三减速器的数量为两个,所述螺杆的数量为四个,所述第一连接杆和所述第二连接杆的数量为两个;所述第一减速器位于所述承载件背离所述入口的一侧;两个所述第二减速器分别设置于所述支撑机构上,且对称布置于所述承载件的相对两侧;两个所述第三减速器分别设置于所述支撑机构上,且对称布置于所述承载件的相对两侧;所述第一减速器的两侧分别设有所述第一轴;所述旋转驱动件驱动两个所述第一轴同步转动;两个所述螺杆间隔地设置于所述承载件上,且分别螺接一个所述第二减速器;每个所述第二减速器设有两个所述第二轴,两个所述第二轴的延伸方向相交;另外两个所述螺杆间隔地设置于所述承载件上,且分别螺接一个所述第三减速器;每个所述第三减速器设有第三轴;所述第二连接杆的两端分别止转连接所述第二轴和第三轴。其中,在承载件的周侧分别对称布置两个第二减速器、对称布置第三减速器,且在于入口相对的一侧布置第一减速器,使旋转驱动件驱使第一轴、第二轴、第三轴、第一螺母和第二螺母同步转动,进而使每个螺杆分别与第一螺母和第二螺母同步进行啮合传动,使承载件稳定地上升或下降,避免出现偏转的问题。
11.根据本技术的一些实施例,所述支撑机构包括支撑主体和多个滚轮,所述支撑主体与所述移动机器人连接,多个所述滚轮安装在所述支撑主体的底部。其中,多个滚轮能够分担移动机器人承载载物架的力,且能够提高移动的稳定性。
12.根据本技术的一些实施例,所述载物架还包括至少一个急停按钮,所述急停按钮设置于所述支撑机构上,并位于所述支撑机构的外侧。其中,急停按钮提高了载物架的安全性。
13.本技术的一些实施例还提出一种移动式顶升输送机,包括移动机器人及上述载物架,载物架设置于所述移动机器人上。上述移动式顶升输送机所带来的技术效果可参见上述载物架相关的描述,此处不再赘述。
附图说明
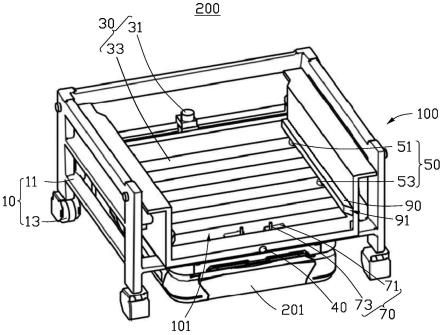
14.图1为根据本技术一实施例的移动式顶升输送机的结构示意图。
15.图2为图1所示的移动式顶升输送机的另一视角的结构示意图。
16.图3为图1所示的移动式顶升输送机中载物架去除支撑机构和升降驱动件时的结构示意图。
17.图4为图1所示的移动式顶升输送机中载物架去除承载件的结构示意图。
18.图5为图1所示的移动式顶升输送机中载物架的升降驱动件的结构示意图。
19.图6为图1所示的移动式顶升输送机的又一视角的结构示意图。
20.图7-图9为图1所示的移动式顶升输送机搬运货物的不同状态图。
21.主要元件符号说明
22.移动式顶升输送机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
200
23.移动机器人
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
201
24.载物架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100
25.支撑机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
26.入口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
101
27.支撑主体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11
28.滚轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
13
29.连接孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
103
30.紧固件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
203
31.升降机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30
32.升降驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31
33.旋转驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
311
34.第一减速器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
312
35.第一轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3121
36.第二减速器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
313
37.第二轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3131
38.第一螺母
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3133
39.第三减速器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
314
40.第三轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3141
41.第二螺母
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3143
42.第一连接杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
315
43.第二连接杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
316
44.螺杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
317
45.承载件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
33
46.承载主体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
331
47.滚筒
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
333
48.传送驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
335
49.转动驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3351
50.连接组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3353
51.第一检测件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
40
52.第二检测件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
50
53.第一感测件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
51
54.第二感测件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
53
55.控制器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
60
56.防护机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
70
57.移动驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
71
58.止挡件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
73
59.导向件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
80
60.导杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
81
61.导块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
83
62.导孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
831
63.导入件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
90
64.导向面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
91
65.急停按钮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
105
66.承载台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
300
67.货物
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
400
68.如下具体实施方式将结合上述附图进一步说明本技术。
具体实施方式
69.下面将结合本技术实施例中的附图,对本技术实施进行描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。
70.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术。
71.本技术一些实施方式提出一种载物架,包括支撑机构、升降机构、第一检测件和控制器。支撑机构包括至少一个入口,且能够连接一移动机器人上。升降机构包括升降驱动件和承载件,所述升降驱动件设置于所述支撑机构上,所述承载件设置于所述升降驱动件上,所述升降驱动件用于驱动所述承载件上升或下降。第一检测件设置于所述承载件上,且位于所述入口的前方,用于检测待搬运的货物的位置。控制器设置于所述支撑机构上,且分别与所述升降驱动件、所述第一检测件和所述移动机器人通讯连接。
72.上述载物架安装于移动机器人上,移动机器人能够带动载物架移动,载物架通过第一检测件得出用于放置货物的承载台的高度,并反馈至控制器,控制器控制升降驱动件驱动承载件上升合适的位移,使货物在承载件与承载台之间平稳地传送,传送结束后,控制器控制升降驱动件驱动承载件回位,升降驱动件能够驱动承载件移动不同的位移,以适应放置在不同高度的承载台上的货物的搬运,无需借助堆高机将货物放置在不同高度的承载台上,实现了自动化搬运货物。
73.下面结合附图,对本技术的一些实施方式作详细说明。在不冲突的情况下,下述的实施例及实施例中的特征可以相互组合。
74.请同时参阅图1、图2和图3,本技术的一实施例提出一种移动式顶升输送机200。移动式顶升输送机200包括载物架100和移动机器人201。载物架100用于承载货物400。货物400包括栈板和设备,设备放置于栈板上,但不限于此。例如,其他实施例中,载物架100也可以直接承载设备等其他货物。载物架100包括支撑机构10、升降机构30、第一检测件40和控制器60。支撑机构10包括至少一个入口101。货物400可以从入口101进入以承载于载物架100上。支撑机构10能够连接移动机器人201上,使载物架100应用于移动式顶升输送机200中。升降机构30包括升降驱动件31和承载件33。升降驱动件31设置于支撑机构10上。承载件33设置于升降驱动件31上。升降驱动件31用于驱动承载件33上升或下降。第一检测件40设置于承载件33上,且位于入口101的前方。第一检测件40用于检测待搬运的货物400的位置,例如,第一检测件40测得用于放置货物400的承载台300的高度。控制器60设置于支撑机构10上。控制器60分别与升降驱动件31、第一检测件40和移动机器人201通讯连接。
75.一实施例中,移动机器人201可以包含集环境感知、动态决策与规划、行为控制与执行等多功。移动机器人201包括但不限于amr(autonomous mobile robot,自主移动机器人201)和agv(automated guided vehicle)小车。
76.请参阅图7至图9,搬运货物400时,先去搬运点取货物400,再将货物400送至目的地。货物400放置于搬运点处的一承载台300上,如图7所示。具体地,移动机器人201根据规划的路线带动载物架100移至搬运点。当移动机器人201移至与搬运点有一设定的距离时,控制器60控制第一检测件40运行,测得货物400所在承载台300的高度。控制器60根据测得的高度控制升降驱动件31驱动承载件33上升合适的位移,如图8所示。例如,一实施例中,承载件33可以上升直至多个承载件33的顶部与承载台300共面,使货物400能够平稳从入口101进入至承载件33上货物400全部承载于传送机构上后,控制器60控制升降驱动件31驱动承载件33下降回位,当回位完成时,控制器60与移动机器人201进行通信,移动机器人201带动载物架100移动至目的地,如图9所示。控制器60控制第一检测件40测得目的地处的另一承载台(图未示)的高度,控制器60控制升降驱动件31驱动承载件33上升合适的位移,使货物400能够从入口101平稳地向另一承载台移动,当货物400承载于该另一承载台时,控制器60控制升降驱动件31驱动承载件33下降回位,完成了货物400的取货、运输和送货。
77.载物架100通过支撑机构10安装于移动机器人201上,移动机器人201能够带动载物架100在货物400的搬运地点(搬运点和目的地)移动,载物架100通过第一检测件40得出用于放置货物400的承载台300的高度,并反馈至控制器60,控制器60控制升降驱动件31驱动承载件33上升合适的位移,使货物400在承载件33与承载台300之间平稳地传送,传送结束后,控制器60控制升降驱动件31驱动承载件33回位,升降驱动件31能够驱动承载件33移动不同的位移,以适应放置在不同高度的承载台300上的货物400的搬运,无需借助堆高机将货物400放置在不同高度的承载台300上,实现了自动化搬运货物400。
78.一实施例中,第一检测件40为光电式传感器,但不限于此。例如,其他实施例中,第一检测件40也可以为数字式传感器,光纤式传感器,超声波传感器等。
79.请参阅图2,载物架100还包括第二检测件50。第二检测件50用于检测货物400与承载件33的接触情况。一实施例中,第二检测件50包括第一感测件51和第二感测件53。第一感测件51和第二感测件53间隔地设置于承载件33上。第一感测件51位于第二感测件53背离入口101的一侧。第一感测件51和第二感测件53分别与控制器60通讯连接。当第一感测件51与
货物400接触时,货物400已经完全承载于承载件33上,此时,货物400也与第二感测器接触。第一感测件51反馈与货物400接触的信号至控制器60。控制器60将货物400传送至承载件33上的信号反馈至移动机器人201,移动机器人201带动载物架100移动以对货物400进行搬运作业。当将获取从载物架100中卸下时,货物400的大部分承载于承载台300上,货物400与第二感测器脱离,承载件33脱离货物400也不会导致货物400倾倒,货物400移至安全位置,第二感测件53反馈与货物400脱离的信号至控制器60。控制器60控制升降驱动件31驱动承载件33下降回位。
80.第一感测件51能够反馈货物400全部承载于承载件33上的信息至控制器60,移动机器人201通过控制器60得知该信息,并开始带动载物架100移动,进一步提高了搬运的自动化。第二感测件53能够反馈货物400离开承载件33时,移动至一安全位置的信息至控制器60,控制器60再控制升降驱动件31驱动承载件33回位,进一步提高了搬运的自动化,进一步地,提高了搬运的效率以及搬运的安全性。
81.第一感测件51和第二感测件53的结构相同,均为接触式传感器,但不限于此。例如,其他实施例中,第一感测件51和第二感测件53也可以为光电传感器,当货物400移动至完全承载于承载件33上时,第一感测件51能够感测到货物400上的一标记,即可反馈信号至控制器60;当货物400的大部分(例如,货物400底部的2/3面积)脱离承载件33时移动的位移等于第二感测件53与第一感测件51的间距,第二感测件53检测到该标记即可反馈货物400达到安全位置的信号至控制器60。
82.请参阅图3,承载件33包括承载主体331、传送驱动件335和多个滚筒333。多个滚筒333转动地承载于承载主体331上,并与传送驱动件335连接。传送驱动件335设置于承载主体331上,且能够驱动多个滚筒333滚动。滚筒333为货物400提供移动导向。具体地,传送驱动件335包括转动驱动件3351及连接组件3353。转动驱动件3351设置于承载主体331上,连接组件3353设置于转动驱动件3351上,连接组件3353分别与多个滚筒333啮合连接,转动驱动件3351用于驱动连接组件3353运动并带动多个滚筒333转动,一实施中,连接组件3353为链轮、链条组件,但不限于此。例如,其他实施例中,连接组件3353也可以为同步带轮、同步带组件。转动驱动件3351可以为电机、转动气缸等转动驱动结构。链轮或同步带轮分别与转动驱动件3351连接,链条或者同步带分别与多个滚筒333啮合连接。转动驱动件3351驱动链轮或同步带轮转动,使链条或同步带带动与其啮合的多个滚筒333转动。滚筒333转动将驱使货物400在承载件33上移动,使货物400在承载件33和承载台300之间的传送实现自动化。
83.请同时参阅图1和图3,载物架100还包括防护机构70。一实施例中,防护机构70的数量为两个,但不限于此。防护机构70包括移动驱动件71和止挡件73。移动驱动件71设置于承载件33上,且与控制器60通讯连接。止挡件73设置于移动驱动件71上,且位于承载件33朝向入口101的一侧。移动驱动件71能够驱动止挡件73上升或下降。所述止挡件73能够止挡位于所述承载件33上的货物400从所述入口101脱出。当货物400完全承载于承载件33上时,控制器60控制移动驱动件71驱动止挡件73上升,止挡件73突出于多个滚筒333的顶部。货物400受止挡件73止挡,不会倾倒。在货物400从承载台300上取放至承载件33上,及从承载件33上卸下时,控制器60控制移动驱动件71驱动止挡件73下降,止挡件73的整体位于滚筒333的顶部的下方,止挡件73不会影响货物400的移动。
84.移动驱动件71可以为气缸、电缸等移动驱动结构。
85.防护机构70通过移动驱动件71与控制器60通讯连接,使载物架100对货物400的防护自动化,提高了载物架100的安全性。可以理解,其他实施例中,防护机构70也可以省略。
86.请同时参阅图2、图4和图5,升降驱动件31包括旋转驱动件311、第一减速器312、两个第二减速器313、两个第三减速器314、两个第一连接杆315、两个第二连接杆316和四个螺杆317。第一减速器312、两个第二减速器313和两个第三减速器314分别间隔地设置于支撑机构10上,且位于承载件33的周侧。第一减速器312位于承载件33背离入口101的一侧,但不限于此。两个第二减速器313对称布置于承载件33的相对两侧。两个第三减速器314对称布置于承载件33的对称两侧。第一减速器312的两侧设有两个第一轴3121。旋转驱动件311与第一减速器312连接,并驱动两个第一轴3121同步转动。两个螺杆317间隔地设置于承载件33上,且分别螺接一个第二减速器313。具体地,第二减速器313设有与螺杆317适配的第一螺母3133。每个第二减速器313设有两个第二轴3131。两个第二轴3131的延伸方向相交。第一连接杆315的两端分别止转连接第一轴3121和第二轴3131,使第一轴3121与第二轴3131同步转动。与第一连接杆315连接的第一轴3121带动另一个第一轴3121和第一螺母3133转动,第一螺母3133与螺杆317啮合传动,使螺杆317带动承载件33升降移动。另外两个螺杆317间隔地设置于承载件33上,且分别螺接一个第三减速器314。具体地,第三减速器314设有与螺杆317适配的第二螺母3143。每个第三减速器314设有第三轴3141。第二连接杆316的两端分别止转连接第二轴3131和第三轴3141,使第二轴3131与第三轴3141同步转动。与第二连接杆316连接的第二轴3131带动第三轴3141和第二螺母3143转动,第二螺母3143与螺杆317啮合传动,使螺杆317带动承载件33升降移动。
87.在承载件33的周侧分别对称布置两个第二减速器313、对称布置第三减速器314,且在于入口101相对的一侧布置第一减速器312,使旋转驱动件311驱使第一轴3121、第二轴3131、第三轴3141、第一螺母3133和第二螺母3143同步转动,进而使每个螺杆317分别与第一螺母3133和第二螺母3143同步进行啮合传动,使承载件33稳定地上升或下降,避免出现偏转的问题。
88.可以理解,其他实施例中,第一减速器312也可以位于承载件33与入口101相交的一侧。
89.一实施例中,旋转驱动件311为电机,第一减速器312为齿轮箱,第二减速器313和第三减速器314分别为螺杆317减速器,但不限于此。例如,其他实施例中,旋转驱动件311也可以为转动气缸。
90.可以理解,其他实施例中,升降机构30也可以为滚珠丝杠模组等结构。
91.可以理解,其他实施例中,升降驱动件31中,第二减速器313、第一连接杆315和螺杆317的数量也可以分别为一个,并省略第三减速器314。通过第一减速器312的第一轴3121带动第一连杆以及第二减速器313的第二轴3131转动,使第二减速器313的第二螺母3143转动,进而使第二螺母3143与螺杆317啮合传动,螺杆317带动承载件33移动,进而实现升降驱动件31驱动承载件33上升或下降的功能。
92.请参阅图6,支撑机构10包括支撑主体11和多个滚轮13。支撑主体11与移动机器人201连接。多个滚轮13安装在支撑主体11的底部。多个滚轮13能够分担移动机器人201承载载物架100的力,且能够提高移动式顶升输送机200移动的稳定性。可以理解,其他实施例中,多个滚轮13也可以省略。
93.请参阅图4,支撑主体11上设有多个连接孔103。其中部分连接孔103能够与移动机器人201通过紧固件203连接。连接孔103设计为多个,连接孔103的直径、以及连接孔103之间的间距设计为不同,以使支撑机构10能够与不同的移动机器人201通过紧固件203连接,进而提高载物架100的通用化。
94.可以理解,其他实施例中,支撑机构10也可以通过独立的一连接件与移动机器人201连接,例如,连接件可以分别与支撑机构10和移动机器人201扣接。
95.请参阅图4,升降机构30还包括多个导向件80。导向件80包括导杆81和导块83。导块83设置于支撑机构10上。导块83上设有导孔831。导杆81能够通过导孔831,并沿导孔831移动。导向件80为承载件33的升降提供导向。可以理解,其他实施例中,导向件80也可以省略。
96.请参阅图1,载物架100还包括两个导入件90。导入件90设置于承载件33上,且位于滚筒333的上方。导入件90朝向入口101的一侧设置导向面91。一实施例中,导向面91为一倾斜的平面,可以理解,其他实施例中,导向面91也可以为一曲面。可以理解,其他实施例中,导入件90也可以省略。
97.请参阅图2,载物架100还包括至少一个急停按钮105。一实施例中,急停按钮105的数量为四个,但不限于此。急停按钮105设置于支撑机构10上,并位于支撑机构10的外侧。急停按钮105提高了载物架100的安全性。可以理解,其他实施例中,急停按钮105也可以省略。
98.可以理解,其他实施例中,载物架100也可以不应用于移动机器人201,例如,在短距离搬运货物400时,可以通过人工推动的方式在搬运点和目的地之间搬运货物400。
99.上述载物架100通过支撑机构10安装于移动机器人201上,移动机器人201能够带动载物架100移动,载物架100通过第一检测件40得出用于放置货物400的承载台300的高度,并反馈至控制器60,控制器60控制升降驱动件31驱动承载件33上升合适的位移,使货物400在承载件33与承载台300之间平稳地传送,传送结束后,控制器60控制升降驱动件31驱动承载件33回位,升降驱动件31能够驱动承载件33移动不同的位移,以适应放置在不同高度的承载台300上的货物400的搬运,无需借助堆高机将货物400放置在不同高度的承载台300上,实现了自动化搬运货物400。
100.以上实施例仅用以说明本技术的技术方案而非限制,尽管参照较佳实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解,可以对本技术的技术方案进行修改或等同替换,而不脱离本技术技术方案的精神和实质。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1