自动装载传送装置的制作方法
1.本发明涉及芯片搬运领域,特别涉及一种自动装载传送装置。
背景技术:
2.芯片制造是比较精密的制造工业,在芯片装载传送的作业中,没有合适的装置能够实现芯片的自动传送,并精确控制传送的数量,这会造成整个芯片制造的失败,影响生产效率。
技术实现要素:
3.本发明要解决的技术问题是为了克服现有技术中没有合适的装置能够实现芯片的自动传送,并精确控制芯片的数量的缺陷,提供一种自动装载传送装置。
4.本发明是通过下述技术方案来解决上述技术问题:
5.一种自动装载传送装置,用于芯片传送,所述自动装载传送装置包括结构本体、驱动机构、至少一个垫块和推送器,
6.所述垫块固定在所述结构本体的上表面,并设置在所述推送器沿推送方向的前方,所述推送器与所述驱动机构相连接,并固定在所述结构本体之中,
7.所述推送器的顶面沿推送方向逐渐变高,所述顶面的最高点介于所述垫块的表层工件的上下表面之间,所述顶面的最低点低于所述垫块的上表面,
8.所述驱动机构驱动所述推送器沿推送方向做往复运动,推送方向为所述推送器从接触所述垫块上的工件,推送工件直至将工件从所述垫块上分离的方向。
9.在本方案中,该自动装载传送装置通过调节垫块高度,实现了精确控制推送器一次传送的数量,并且能适应不同厚度工件的传送作业,通过驱动机构和推送器的顶面结构,能够实现自动连续推送,进而达到自动传送装载的效果。
10.较佳地,所述垫块包括至少一个通孔,所述垫块通过紧固件从所述通孔穿过,固定在所述结构本体上。
11.在本方案中,通过此垫块结构,实现垫块灵活更换,方便适应不同厚度、不同材质的工件传送。
12.较佳地,所述自动装载传送装置还包括至少一个挡板,所述挡板设置在所述垫块沿推送方向的前侧,并固定在所述结构本体的表面上,所述挡板的下表面介于所述垫块的表层第二个工件的上下表面之间。
13.在本方案中,通过在垫块的前侧设置此挡板结构,能够阻挡垫块的表层工件以上的工件随着表层工件一起被推送,稳定控制传送的数量。
14.较佳地,所述自动装载传送装置还包括至少一个挡板,所述挡板设置在所述垫块沿推送方向的后侧,所述挡板固定在所述结构本体的表面上。
15.在本方案中,通过在垫块的后侧设置挡板,使得工件不会受到推送器返回的冲击而滑落,保证往复传送运动的连续性。
16.较佳地,所述自动装载传送装置还包括至少一个挡板,所述挡板设置于所述垫块沿垂直于推送方向的两侧,所述挡板固定在所述结构本体的表面上。
17.在本方案中,通过在垫块沿垂直于推送方向的两侧设置挡板,使得工件的放置规则整齐,在连续推送的过程中,不会因为推送的冲击而滑落。
18.较佳地,所述挡板的顶部包括倒角。
19.在本方案中,采用倒角结构,容易装载待传送的工件。
20.较佳地,所述顶面与所述推送器的侧面在所述顶面的最低点连接处形成过度圆弧面。
21.在本方案中,推送器的过度圆弧面能够在推送器返回时,有效降低对待传送工件的冲击,保护工件的质量。
22.较佳地,所述自动装载传送装置还包括限位器,所述限位器固定在所述结构本体之中,所述限位器与所述驱动机构电连接,所述推送器经过所述限位器时,所述限位器产生位置信号,并将所述位置信号反馈给所述驱动机构。
23.在本方案中,通过限位器,能够精确控制传送的距离,有利于传送效率。
24.较佳地,所述驱动机构包括电机、传送带、传动轮和支座,所述传送带与所述电机、所述传动轮和所述推送器相连接,所述传动轮与所述支座相连接,所述支座与所述结构本体相连接。
25.在本方案中,通过此驱动机构,能够实现推送器的连续往复运动,也实现了驱动力向推送力的转化和传递。
26.较佳地,所述传送带的至少一个表面为齿形,所述推送器上也设置有齿形,所述推送器上的齿形与所述传送带上的齿形相互配合。
27.在本方案中,传送带和推送器通过齿形连接,获得稳定的推送力传递。
28.较佳地,所述推送器包括推送本体和夹持块,所述推送本体或所述夹持块上设置有齿形,所述推送本体或所述夹持块上的齿形与所述传送带上的齿形相互配合;所述夹持块与所述推送本体相连接,并且一起夹持所述传送带。
29.在本方案中,通过将推送器分为推送本体和夹持块,形成分体的夹持结构,而不是推送器作为一个整体直接与传送带连接,降低往复运动过程中推送冲击对推送器与传送带的连接可靠性的要求,提高连接寿命。
30.较佳地,所述自动装载传送装置还包括滑轨和滑块,所述滑块与所述推送器和所述滑轨相连接,所述滑轨固定在所述结构本体之中,并且沿推送方向上布置,所述滑块可以沿着推送方向在所述滑轨上做往复滑动。
31.在本方案中,通过滑块与推送器连接,使得推送器与传送带的连接获得很好的支撑,通过滑块和滑轨结构,有利于推送运动的平稳性,降低推送冲击对工件的影响。
32.较佳地,所述自动装载传送装置还包括控制模块和限位器,所述控制模块与所述驱动机构和所述限位器电连接。
33.在本方案中,通过控制模块,可以实现推送位置的精确控制,推送力的调节,推送时间的调节等,进而实现自动传送的智能控制,提高生产效率。
34.本发明的积极进步效果在于:该自动装载传送装置,使得芯片等精密产品能够连续传送,精确控制传送数量和位置,实现了自动、智能的传送控制,提高了生产效率。
附图说明
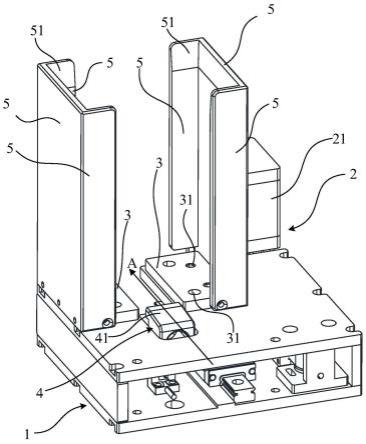
35.图1为本发明实施例的自动装载传送装置的结构示意图。
36.图2为本发明实施例的自动装载传送装置的内部结构俯视图。
37.图3为本发明实施例的自动装载传送装置的内部结构仰视图。
38.图4为本发明实施例的自动装载传送装置的内部结构示意图。
39.图5为本发明实施例的夹持块的结构示意图。
40.附图标记说明:
41.结构本体1、驱动机构2、电机21,传送带22,传动轮23,支座24,
42.垫块3,通孔31,
43.推送器4,顶面41,过度圆弧面42,推送本体43,夹持块44,
44.挡板5,倒角51,表层工件6,表层第二个工件7,
45.限位器8,滑轨9,滑块10,
46.推送方向a。
具体实施方式
47.下面通过实施例的方式进一步说明本发明,但并不因此将本发明限制在所述的实施例范围之中。
48.如图1和3示,本发明提供一种自动装载传送装置,其用于芯片等精密产品装载传送作业,该自动装载传送装置包括结构本体1、驱动机构2、2个垫块3和推送器4,垫块3固定在结构本体1的上表面,并设置在推送器4沿推送方向a的前方,推送器4与驱动机构2相连接,并固定在结构本体1之中,
49.推送器4的顶面41沿推送方向a逐渐变高,顶面41的最高点介于垫块3的表层工件6的上下表面之间,顶面41的最低点低于垫块3的上表面,
50.驱动机构2驱动推送器4沿推送方向a做往复运动。
51.该自动装载传送装置通过垫块3的厚度调节表层工件6的高度,实现了精确控制推送器4一次传送的数量,并且能适应不同厚度工件的传送作业,通过驱动机构2和推送器4的顶面41结构,能够实现自动连续推送,进而达到自动传送装载的效果。
52.如图1和2所示,每个垫块3包括4个通孔31,垫块3通过紧固件从通孔31穿过,固定在结构本体1上。通过此垫块3结构,实现垫块3灵活更换,方便适应不同厚度、不同材质的工件传送。在其他实施例中,通孔31的数量可以根据紧固的需要
53.如图1和2所示,该自动装载传送装置还包括6个挡板5,其中2个挡板5设置在垫块3沿推送方向a的前侧,并固定在结构本体1的表面上,该2个挡板5的下表面介于垫块3的表层第二个工件7的上下表面之间。通过在垫块3的前侧设置此挡板5,能够阻挡垫块3的表层工件6以上的工件随着表层工件6一起被推送,稳定控制传送的数量。
54.如图1和2所示,该自动装载传送装置还有2个挡板5设置在垫块3沿推送方向a的后侧,该2个挡板5固定在结构本体1的表面上。通过在垫块3的后侧设置挡板5,使得工件不会受到推送器4返回的冲击而滑落,保证往复传送运动的连续性。
55.如图1和2所示,该自动装载传送装置还有2个挡板5设置于垫块3沿垂直于推送方向a的两侧,该2个挡板5固定在结构本体1的表面上。通过在垫块3沿垂直于推送方向a的两
侧设置挡板5,使得工件的放置规则整齐,在连续推送的过程中,不会因为推送的冲击而滑落。
56.在本实施例中,推送器4设置在2个垫块3的中间,设置在垫块3前后侧和垂直于推送方向a的两侧的挡板5的数量分别为2个,在其他实施例中,也可以是垫块3设置在中间位置,而推送器4可以分为两部分,分别设置于垫块3的两侧,则在这种情况下,设置在垫块3前后侧的挡板5的数量可以为1个,设置垫块3于垂直于推送方向a两侧的挡板5的数量可以为1个或2个;垫块3和推送器4还可以有其他结构形式,挡板5的数量可以根据需要相应地调节。
57.如图1所示,挡板5的顶部包括倒角51。采用倒角51结构,容易装载待传送的工件。
58.如图3所示,顶面41与推送器4的侧面在顶面41的最低点连接处形成过度圆弧面42。推送器4的过度圆弧面42能够在推送器4返回时,有效降低对待传送工件的冲击,保护工件的质量。
59.如图4所示,该自动装载传送装置还包括限位器8,限位器8固定在结构本体1之中,限位器8与驱动机构2电连接,推送器4经过限位器8时,限位器8产生位置信号,并将位置信号反馈给驱动机构2。通过限位器8,能够精确控制传送的距离,有利于传送效率。
60.如图4所示,驱动机构2包括电机21、传送带22、传动轮23和支座24,传送带22与电机21、传动轮23和推送器4相连接,传动轮23与支座24相连接,支座24与结构本体1相连接。通过此驱动机构2,能够实现推送器4的连续往复运动,也实现了驱动力向推送力的转化和传递。
61.如图4和5所示,传送带22的表面为齿形,推送器4上也设置有齿形,推送器4上的齿形与传送带22上的齿形相互配合。传送带22和推送器4通过齿形连接,获得稳定的推送力传递。
62.如图4和5所示,推送器4包括推送本体43和夹持块44,推送本体43或夹持块44上设置有齿形,推送本体43或夹持块44上的齿形与传送带22上的齿形相互配合;夹持块44与推送本体43相连接,并且一起夹持传送带22。通过将推送器4分为推送本体43和夹持块44,形成分体的夹持结构,而不是推送器4作为一个整体直接与传送带22连接,降低往复运动过程中推送冲击对推送器4与传送带22的连接可靠性的要求,提高连接寿命。在其他实施例中,齿形也可以设置在推送本体43上,由推送本体43上的齿形与传送带22上的齿形相互配合。
63.如图4所示,该自动装载传送装置还包括滑轨9和滑块10,滑块10与推送器4和滑轨9相连接,滑轨9固定在结构本体1之中,并且沿推送方向a上布置,滑块10可以沿着推送方向a在滑轨9上做往复滑动。通过滑块10与推送器4连接,使得推送器4与传送带22的连接获得很好的支撑,通过滑块10和滑轨9结构,有利于推送运动的平稳性,降低推送冲击对工件的影响。
64.该自动装载传送装置还包括控制模块(图中未显示),控制模块与电机21和限位器8电连接。通过控制模块,可以实现推送位置的精确控制,推送力的调节,推送时间的调节等,进而实现自动传送的智能控制,提高生产效率。
65.虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这仅是举例说明,本发明的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本发明的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,但这些变更和修改均落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1