自动扶梯的自动防误入装置及其控制方法与流程
1.本发明涉及自动扶梯领域,具体是一种自动扶梯的自动防误入装置,以及该装置的控制方法。
背景技术:
2.自动扶梯是建筑物中的一种常见的交通工具,属于特种设备的范畴,具有一定危险性。现有国标gb16899
‑
2011中规定,自动扶梯是机器,在非运行状态下应当关闭,不能当作固定楼梯使用,以免出现危险。然而在实际使用时,如有故障、停电或者自动扶梯人为关闭等情况下,虽然自动扶梯已经停止运行,但是行人往往无意识的进入自动扶梯,将已经停止的自动扶梯当作固定扶梯上、下楼。此外,当自动扶梯处于节能的低速运行或者休眠状态时,偶有一些低头看手机而未关注到扶梯状态的行人,也可能会因为没有阻挡而逆向进入自动扶梯,形成危险。为了阻挡行人误入,需要另外安置阻挡机构。传统上,可以使用三角锥、安全栏等拦阻物品放置在自动扶梯的进、出口外。例如,中国专利文献cn210973515u于2020年7月10日公开了“自动扶梯维保护栏”,包括防护框架、第一固定块、警示牌、护栏主体和第二固定块,所述护栏主体的两侧和一端皆均匀安装有防护框架,且防护框架两侧的两端均安装有第一固定块,所述第一固定块一侧的防护框架上均安装有第二固定块,且第二固定块和第一固定块靠近防护框架的一侧均设置有固定槽,固定槽均与防护框架连接。本实用新型通过安装有第一固定块、第二固定块、螺纹槽和紧固螺栓,使得便于夹紧固定防护框架,以便将其展开固定成维保护栏,或者松开防护框架,以便将其折叠组合,从而方便运输。此类方案的缺点是拦阻物品需要另外单独配备,可以被不知情者移动,无法和自动扶梯的启停同步作用。
技术实现要素:
3.基于以上问题,本发明提供一种自动扶梯的自动防误入装置,固定安装在自动扶梯上,无需额外配置,工作状态时不可移动,而且可以由自动扶梯的控制主板同步控制动作。在此基础上,本发明还公开了其控制方法。
4.为了实现发明目的一,本发明采用如下技术方案:一种自动扶梯的自动防误入装置,包括:伺服电机,安装在自动扶梯的入口处或出口处的护栏板内;拦阻杆,根部连接在伺服电机的电机轴上,受伺服电机控制在竖直和水平两个方向间可转动;拦阻杆摆动至水平状态时,拦阻杆的轴向与自动扶梯的出入方向垂直;主板,控制自动扶梯及伺服电机的运行;行人接近探测装置,用于探测行人靠近自动扶梯的入口处或出口处。
5.本方案设计的自动扶梯的自动防误入装置,包括有主板、伺服电机、拦阻杆和行人接近探测装置。主板控制自动扶梯和伺服电机的运行,拦阻杆与伺服电机连接,通常一个伺服电机配设一根拦阻杆作为一个装置,在自动扶梯的入口处或出口处的护栏板内均可以安
装本装置,如果拦阻杆足够长,可以仅安装一个装置,用一根拦阻杆实现拦阻;如果拦阻杆较短,也可以成对安装,使用两根拦阻杆实现拦阻。通常情况,拦阻杆以垂直于伺服电机的电机轴向的方向固定在电机轴上,而伺服电机受控驱动拦阻杆转动,使拦阻杆在竖直和水平这两个方向之间可转动。当转动至水平伸出时,拦阻杆起到拦阻作用,而转动至竖直时,拦阻作用取消。伺服电机可以通过信号连接至自动扶梯的主板上,通过自动扶梯的主板根据自动扶梯的当前工作状态来控制伺服电机的动作,进而实现拦阻杆的升起与降落。行人接近探测装置用来自动监控行人行人靠近自动扶梯的入口处或出口处,并将相应信号传递给主板,由主板控制自动扶梯或伺服电机做出相应的反应动作。
6.作为优选,拦阻杆受伺服电机控制在向下竖直和水平两个方向间可转动。针对自动扶梯常规的位置,通常建议将拦阻杆的收拢状态确定为向下竖直,避免突兀的设置在空中。
7.作为优选,还包括伺服电机安装板;护栏板内固定有护栏板竖杆;伺服电机安装板的截面形状为l形,l形的其中一面与护栏板竖杆,伺服电机固定在l形的另一面。伺服电机安装板是一个截面形状为l形的薄板,l形的两条边所在的面一个与既有的护栏板竖杆固定,另一个用来固定安装伺服电机。
8.作为优选,伺服电机安装板的与护栏板竖杆连接的一面上设有上下方向延伸的长孔,与伺服电机连接的一面上设有左右方向延伸的长孔,并通过螺栓副穿过相应长孔固定。使用长孔设计,可以在安装时进行位置的微调。
9.作为优选,护栏板的入口端或出口端设有栏板端面板;栏板端面板上对应位置上设有容纳孔,拦阻杆摆动至竖直状态时,适配嵌入容纳孔内。本方案在栏板端面板上开设了容纳孔,可以将下垂状态的拦阻杆隐藏在容纳孔内,从而避免了对行人的干扰,也能保持自动扶梯的整洁美观。
10.作为优选,栏板端面板内安装有拦阻杆保护槽,拦阻杆保护槽的尺寸与拦阻杆适配,拦阻杆保护槽的开口与容纳孔对应。拦阻杆保护槽通常可以选择不锈钢材质的槽形钢,开口与容纳孔对应,使下垂的拦阻杆落在拦阻杆保护槽内,得到很好的保护。
11.作为优选,扶梯出入口安装有接近传感器,和/或自动扶梯的扶梯楼层板下方安装有重力传感器。接近传感器、重力传感器同样与自动扶梯的主板信号连接,用来监控是否有行人走近自动扶梯,是否需要启动警示信号以及帮助判断行人的行走方向是否正确,最终由自动扶梯的主板决定是否启动自动扶梯以载运行人,或者启动拦阻杆以拦阻行人。
12.作为优选,拦阻杆的根部与端部之间以弹簧连接。这样可以增加拦阻杆的弹性,行人逆向进入自动扶梯后,即使与拦阻杆相撞,也不会造成人身伤害或者拦阻杆自身被撞断。
13.作为优选,拦阻杆的数量为两根,在自动扶梯的宽度方向的两侧分别安装;两根拦阻杆举升至水平位置时的轴线重合;其中一个拦阻杆的端部固定有永磁体,另一个拦阻杆的端部安装有感应线圈,感应线圈电连接声、光警报装置。两个拦阻杆的端部的摆动,可以形成感应线圈不断切割磁力线的自发电效应,产生电流,驱动声、光警报装置工作,例如蜂鸣器、警示灯等。该方案的作用是:自动扶梯处于待机状态时,行人逆向进入自动扶梯,接近传感器、重力传感器检测到人进入,主板控制伺服电机驱动两根拦阻杆其中之一摆动或两杆先后摆动,进入自发电状态,发出声光报警,提醒行人。自动扶梯处于关机停止状态,如果有人随意拨弄拦阻杆,也会引起两杆末端有相对位移,触发拦阻杆发电,声、光警报装置例
如蜂鸣器、警示灯等发出报警提醒。
14.为了实现发明目的二,本发明采用如下技术方案:一种自动扶梯的自动防误入装置的控制方法,应用在上、下口均安装有如前所述的自动扶梯的自动防误入装置的自动扶梯上,包括如下步骤:自动扶梯的正常停止、上行高速、下行高速、上行低速及停止待机、下行低速及停止待机、检修不运行、检修上行、检修下行、上行中故障、下行中故障等不同状态由主板检测识别,根据不同的状态控制伺服电机和对应拦阻杆形成不同的工作模式:正常停止模式,控制上、下伺服电机升起上、下拦阻杆,上、下口均关闭;上行高速模式,控制上、下伺服电机下降收起上、下拦阻杆,上、下口均开启;下行高速模式,控制上、下伺服电机下降收起上、下拦阻杆,上、下口均开启;上行低速及停止待机模式,控制上口伺服电机升起上口拦阻杆,上口关闭,下口保持拦阻杆处于下降收起状态,下口开启;上部接近传感器检测到有人逆向进入时,主板控制伺服电机驱动上部拦阻杆其中之一摆动或两杆先后摆动,上口拦阻杆的感应线圈和永磁体被触发至发电状态,声、光警报装置开始工作;下口有人正常进入时,自动扶梯切换至上行高速模式;下行低速及停止待机模式,控制下口伺服电机升起下口拦阻杆,下口关闭,上口保持拦阻杆处于下降收起状态,上口开启;下部接近传感器检测到有人逆向进入时,主板控制伺服电机驱动下部拦阻杆其中之一摆动或两杆先后摆动,下口拦阻杆的感应线圈和永磁体被触发至发电状态,声、光警报装置开始工作;上口有人正常进入时,自动扶梯切换至下行高速模式;检修不运行模式,控制上、下伺服电机升起上、下拦阻杆,上、下口均关闭;检修上行模式,控制下口伺服电机下降收起下拦阻杆,上口伺服电机升起上拦阻杆,下口打开,上口关闭;检修下行模式,控制上口伺服电机下降收起上拦阻杆,下口伺服电机升起下拦阻杆,上口打开,下口关闭;上行中故障模式,控制下口伺服电机打开下拦阻杆,下口即时关闭,上口伺服电机延时打开上拦阻杆,上口延时关闭;下行中故障模式,控制上口伺服电机打开上拦阻杆,上口即时关闭,下口伺服电机延时打开下拦阻杆,下口延时关闭。
15.本方案充分利用了主板控制上、下口伺服电机带动上、下口拦阻杆的升降动作,配合自动扶梯的不同工作状态,形成上、下口不同的打开关闭状态。
16.综上所述,本发明的有益效果是:固定安装在自动扶梯上,无需额外配置,工作状态时不可移动,而且可以由自动扶梯的控制主板同步控制动作。
附图说明
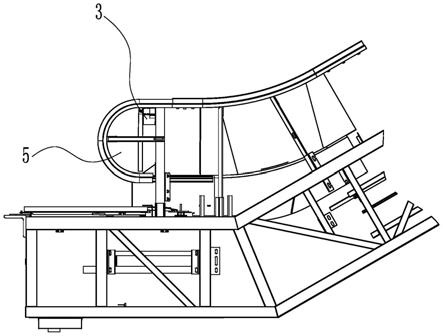
17.图1是本发明的侧视图。
18.图2是本发明的正视图。
19.图3是本发明的立体图。
20.图4是图3的a部放大图。
21.图5是伺服电机和拦阻杆的连接结构示意图。
22.图6是左侧拦阻杆的结构示意图。
23.图7是右侧拦阻杆的结构示意图。
24.其中:1伺服电机,2拦阻杆,21弹簧,22永磁体,23感应线圈,3伺服电机安装板,4护栏板竖杆,5栏板端面板,51容纳孔,52拦阻杆保护槽,6接近传感器。
具体实施方式
25.下面结合附图与具体实施方式对本发明做进一步的描述。
26.实施例1实施例1为一种自动扶梯的自动防误入装置。如图1、图2、图3、图4所示,本装置安装在自动扶梯的下方入口处。此处的护栏板包括栏板端面板5,在栏板端面板5的内侧还有护栏板竖杆4。在护栏板竖杆4上固定有伺服电机安装板3。伺服电机安装板3的结构参见图7,包括两个配合面,两个配合面构成的截面形状为l形,两个配合面上都设计有固定孔,固定孔为长孔,可用于位置微调。两个配合面的其中一个与护栏板竖杆4通过螺栓副固定,另一个通过长孔与伺服电机1固定。伺服电机1的电机轴与拦阻杆2的一端固定,且伺服电机1的电机轴轴向与拦阻杆2的轴向互相垂直,如图5所示。本例中,伺服电机1与自动扶梯的主板之间为信号连接,可以通过主板控制伺服电机1的启停转动动作,带动拦阻杆2在垂直向下和升起至水平两个位置之间转动。参见图6,在栏板端面板5上设置有容纳孔51,容纳孔51为长孔,长度方向沿上下方向延伸,尺寸位置均与处于下垂状态的拦阻杆2适配。在容纳孔51内,固定安装有拦阻杆保护槽52,拦阻杆保护槽52的形状尺寸与拦阻杆2适配,开口即为容纳孔51,当拦阻杆2下垂至下止点时,正好可以嵌入容纳孔51内,静置在拦阻杆保护槽52中。如图2所示,在右侧护栏板的入口出下方还安装有接近传感器6,自动扶梯的扶梯楼层板下方安装有重力传感器(图中未示出)。接近传感器6和重力传感器都与自动扶梯的主板之间信号连接,可以帮助判断是否有行人靠近及行人的进入方向是否正确。主板还与一个语音发生装置连接,语音发生装置由主板控制,可以在不同工作模式下发出不同的语音警示。
27.本例的装置中,伺服电机1和拦阻杆2都是成对设计的,分别安装在自动扶梯的下方入口处宽度方向的左、右两侧,且两根拦阻杆2举升至水平位置时的轴线重合。参见图6所示,左侧拦阻杆2的根部与端部之间以弹簧21连接,端部固定有永磁体22,本例为一块磁铁。参见图7所示,右侧拦阻杆2的根部与端部之间以同样以弹簧21连接,而端部安装有感应线圈23和一个蜂鸣器、一个灯光报警器,感应线圈23与蜂鸣器、灯光报警器电连接。左、右两个拦阻杆2的端部距离很近。待机停止状态,当有行人逆向走进,接近传感器6检测到人,主板控制伺服电机1驱动阻拦杆2先后动作,触发两个拦阻杆2的端部摆动,形成感应线圈23切割磁力线的发电效应,启动蜂鸣器、灯光报警器工作。
28.实施例2实施例2为一种自动扶梯的自动防误入装置的控制方法,应用在上、下口均安装有如实施例1所述自动扶梯的自动防误入装置的自动扶梯上。
29.自动扶梯的正常停止、上行高速、下行高速、上行低速及停止待机、下行低速及停止待机、检修不运行、检修上行、检修下行、上行中故障、下行中故障等不同状态由主板检测识别,根据不同的状态控制伺服电机和对应拦阻杆形成不同的工作模式。
30.本方法包括如下步骤:正常停止模式,控制上、下伺服电机升起上、下拦阻杆,上、下口均关闭;上行高速模式,控制上、下伺服电机下降收起上、下拦阻杆,上、下口均开启;下行高速模式,控制上、下伺服电机下降收起上、下拦阻杆,上、下口均开启;上行低速及停止待机模式,控制上口伺服电机升起上口拦阻杆,上口关闭,下口保持拦阻杆处于下降收起状态,下口开启;上部接近传感器检测到有人逆向进入时,主板控制伺服电机驱动上部拦阻杆其中之一摆动或两杆先后摆动,上口拦阻杆的感应线圈和磁铁被触发至发电状态,声、光警报装置开始工作;下口有人正常进入时,自动扶梯切换至上行高速模式;下行低速及停止待机模式,控制下口伺服电机升起下口拦阻杆,下口关闭,上口保持拦阻杆处于下降收起状态,上口开启;下部接近传感器检测到有人逆向进入时,主板控制伺服电机驱动下部拦阻杆其中之一摆动或两杆先后摆动,下口拦阻杆的感应线圈和磁铁被触发至发电状态,声、光警报装置开始工作;上口有人正常进入时,自动扶梯切换至下行高速模式;检修不运行模式,控制上、下伺服电机升起上、下拦阻杆,上、下口均关闭;检修上行模式,控制下口伺服电机下降收起下拦阻杆,上口伺服电机升起上拦阻杆,下口打开,上口关闭;检修下行模式,控制上口伺服电机下降收起上拦阻杆,下口伺服电机升起下拦阻杆,上口打开,下口关闭;上行中故障模式,控制下口伺服电机打开下拦阻杆,下口即时关闭,上口伺服电机延时打开上拦阻杆,上口延时关闭,以方便扶梯上的行人通过上口安全离开;下行中故障模式,控制上口伺服电机打开上拦阻杆,上口即时关闭,下口伺服电机延时打开下拦阻杆,下口延时关闭,以方便扶梯上的行人通过下口安全离开。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1