显示屏搬运机器人的制作方法
1.本发明涉及物流行业,具体涉及仓储系统,特别涉及一种显示屏搬运机器人。
背景技术:
2.现有技术中企业和机构中使用的大屏幕越来越多,根据活动需要经常搬动。现有移动支架需要至少2个人推动,很不方便。现有技术中为了解决上述技术问题,结合机械结构的研发了用于搬运显示屏的搬运装置。
3.例如,中国专利申请号为cn201710803758.2一种大型显示屏搬运装置,公开了一种大型显示屏搬运装置,包括底座,所述底座的上端开设有固定槽,所述固定槽上插设有显示屏本体,所述固定槽的槽底固定连接有卸货轮,所述显示屏本体的下端放置在卸货轮上,所述底座的两端铰接有密封盖,所述密封盖与底座之间连接有卡扣,所述底座的上端两侧均铰接有夹板,两个所述夹板远离底座的一端之间连接有第一插销,所述显示屏本体位于两个夹板之间,所述夹板的外侧面上开设有收纳槽,所述收纳槽内设有撑板,且撑板的远离底座的一端与收纳槽的槽口铰接”,上述发明虽然能够更方便搬运大型显示屏,并且能够防止搬运过程中发生倾倒,但是此装置在运输过程中不能够根据需要进行随时固定和移动,不便于对显示屏的搬运;没有减震装置,不能够对显示屏进行减震,易造成显示屏边角受到损坏;不能调节显示屏的角度,造成显示屏搬运过程中十分费劲,而且大型显示屏不能碰撞,不能挤压,通过人工搬运十分不便;更不利于便捷的转移以及后续的使用。
技术实现要素:
4.本发明克服了现有技术的不足,提供一种显示屏搬运机器人,具有便捷转移搬运以及搬运角度调节功能。
5.为达到上述目的,本发明采用的技术方案为:一种显示屏搬运机器人,包括底部设置有行走轮的驱动底座,所述驱动底座上设置有驱动转盘,以及外部检测机构,且所述外部检测机构位于所述驱动转盘外围;所述驱动转盘上驱动设置有位置调整机构,所述位置调整机构上驱动设置有定位机械手和吸附定位机构;所述定位机械手包括至少一对用于夹持显示屏的夹爪,所述吸附定位机构包括若干个吸附盘,所述吸附盘上设置有若干个用于吸附显示屏的吸盘。
6.本发明一个较佳实施例中,位置调整机构包括升降机构,所述升降机构上设置有水平位移机构,所述水平位移机构上驱动设置有定位机械手和吸附定位机构。
7.本发明一个较佳实施例中,吸附定位机构包括设置在所述位置调整机构上的升降杆一,所述升降杆一的上部设置有吸附盘。
8.本发明一个较佳实施例中,升降杆一与所述吸附盘之间还设置有用于调节角度的角度调节座一。
9.本发明一个较佳实施例中,外部检测机构包括设置在驱动底座上的升降杆二,所述升降杆二的上端设置有能相对所述驱动底座上表面纵向升降的检测探头。
10.本发明一个较佳实施例中,驱动底座或/和定位机械手上设置有距离传感器。
11.本发明一个较佳实施例中,水平位移机构包括设置在所述升降机构上部的位移机构一和滑轨一以及滑动设置在滑轨一上的位移板一,所述位移板一上设置有位移机构二和滑轨二,以及滑动设置在滑轨二上的位移板二,所述位移板二上设置有定位机械手和吸附定位机构,所述定位机械手位于所述吸附定位机构前侧。
12.本发明一个较佳实施例中,位移板二上还设置有位移机构三和滑轨三,以及滑动设置在滑轨三上的角度调节座二,且角度调节座二与位移机构三驱动连接,所述角度调节座二上驱动设置有定位机械手。
13.本发明一个较佳实施例中,驱动转盘上设置有定位支架,所述定位支架位于所述定位机械手以及吸附定位机构的后方,所述定位支架包括至少一对相对设置在驱动转盘上的立杆,相对设置的立杆上横跨设置有至少一对能相对纵向开合的横杆,所述横杆上分别设置有至少一对能相对开合的定位支架座,所述定位支架座上设置有用于对接收纳所述显示屏侧边或对角的限位槽。
14.本发明一个较佳实施例中,一种显示屏搬运机器人的搬运方法,采用显示屏搬运机器人,搬运的方法包括以下步骤;a.通过驱动底座上设置的外部检测机构采集外部环境信息以及显示屏的参数信息;b.驱动所述驱动底座至显示屏正面,通过驱动转盘和位置调整机构调节定位机械手和吸附定位机构与显示屏之间的相对位置;c.驱动定位机械手位移至显示屏的下方,打开定位机械手的夹爪,夹持住显示屏的下侧外壳的外边沿,通过吸附定位机构吸附住显示屏的背面,实现对显示屏的获取定位;d.复位位置调整机构,通过驱动转盘调整显示屏在环境中的角度,驱动底座根据外部检测机构以及距离传感器将装载的显示屏进行位置的转移;e.驱动底座转移装载的显示屏,通过驱动转盘和外部检测机构以及距离传感器实现转移过程中的避障操作。
15.根据上述实施例所揭露的显示屏搬运机器人,达到的有益效果是:公开了一种显示屏搬运机器人,具有便捷转移搬运以及搬运角度调节功能。
16.1、驱动转盘和位置调整机构调节定位机械手和吸附定位机构与显示屏之间的相对位置。驱动定位机械手与吸附定位机构实现对显示屏的夹持定位获取。
17.2、通过驱动底座上设置的外部检测机构采集外部环境信息以及显示屏的参数信息。驱动底座根据外部检测机构以及距离传感器将装载的显示屏进行位置的转移、避障。
18.3、搬运的过程中驱动底座可以通过底座的行走轮调节驱动底座的角度。同时还能通过驱动转盘调节获取装载的显示屏与驱动底座之间的角度,便于驱动底座装载显示屏进行位置的转移。
附图说明
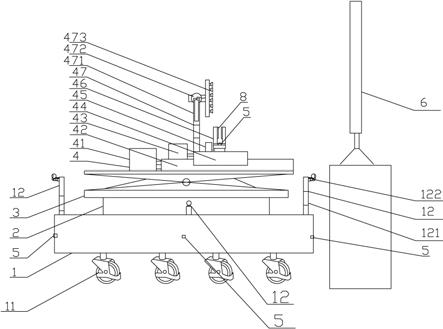
19.下面结合附图和实施例对本发明进一步说明;图1为根据本发明所揭露的显示屏搬运机器人的侧视结构示意图一;图2为根据本发明所揭露的显示屏搬运机器人的俯视结构示意图一 ;
图3为根据本发明所揭露的显示屏搬运机器人的俯视结构示意图二 ;图4为根据本发明所揭露的显示屏搬运机器人的侧视结构示意图二;图5为根据本发明所揭露的显示屏搬运机器人的俯视结构示意图三;图6为根据本发明所揭露的显示屏搬运机器人中定位支架与驱动底座组合安装的结构示意图一;图7为根据本发明所揭露的显示屏搬运机器人中定位支架与驱动底座组合安装的结构示意图二;图中:1
‑
驱动底座,11
‑
行走轮,12
‑
外部检测机构,121
‑
升降杆二,122
‑
检测探头,2
‑
驱动转盘,3
‑
升降机构,4
‑
水平位移机构,41
‑
位移机构一,42
‑
位移板一,43
‑
位移机构二,44
‑
位移板二,45
‑
位移机构三,46
‑
定位机械手,47
‑
吸附定位机构,471
‑
升降杆一,472
‑
角度调节座一,473
‑
吸附盘,5
‑
距离传感器,51
‑
平衡限位机构,52
‑
角度调节座二,6
‑
显示屏,7
‑
定位支架,71
‑
底座,72
‑
立杆,721
‑
纵向开合机构,73
‑
横杆,731
‑
横向开合机构,74
‑
定位支架座,741
‑
限位槽,8
‑
柔性垫。
具体实施方式
20.现在结合附图和实施例对本发明作进一步详细的说明,这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
21.实施例一如图1~图3所示,一种显示屏搬运机器人,包括底部设置有行走轮11的驱动底座1,驱动底座1上设置有驱动转盘2,以及外部检测机构12,且外部检测机构12位于驱动转盘2外围,外部检测机构12包括设置在驱动底座1上的升降杆二121,升降杆二121的上端设置有能相对驱动底座1上表面纵向升降的检测探头122。检测探头122采用的现有技术中的用于采集外部环境信息的图像采样检测探头122,且检测探头122还包含了测距检测器,通过图像采样以及测距检测器组合结构实现对外部环境的信息检测和采样,通过将外部环境参数以及显示屏6在环境中的参数采集汇总。外部检测机构12采用的嵌入式设置的结构设置在驱动底座1上,通过升降杆二121实现检测探头122的高度调节,有效防止驱动底座1上的工作部件动作时碰撞到探头。
22.驱动转盘2上驱动设置有位置调整机构,位置调整机构上驱动设置有定位机械手46和吸附定位机构47;定位机械手46包括至少一对用于夹持显示屏6的夹爪,且相对设置的夹爪驱动设置在位于下部的支撑座上,夹持能相对支撑座的中部相对开合,且夹持通过夹持气缸与支撑座驱动连接。支撑座的上表面还设置有柔性垫,且支撑座上还设置有检测方向朝上的距离传感器5,距离传感器5嵌设在支撑座的上部,便于检测定位机械手46与待夹持的显示屏的下边沿之间的间距。进一步的在夹爪上还设置有柔性传感器,用于检测夹持压力。柔性传感器以及距离传感器5根据实际的使用需求选用现有技术中的产品型号,在此不再一一列举产品型号的选用。
23.吸附定位机构47包括设置在位置调整机构上的升降杆一471,升降杆一471的上部设置有吸附盘473。升降杆一471与吸附盘473之间还设置有用于调节角度的角度调节座一472;吸附盘473上设置有若干个用于吸附显示屏6的吸盘。吸盘通过与吸盘底座驱动连接的吸附气缸连接,吸盘采用的是真空吸盘,通过吸附气缸对吸盘进行抽气和排气实现抽吸操
作。驱动底座1和定位机械手46上分别设置有距离传感器5。距离传感器5采用的是现有技术中的红外线测距传感器或激光测距传感器中的一种或多种的组合。
24.具体的,位置调整机构包括升降机构3,升降机构3上采用的是与驱动底座1内的驱动机构驱动连接的剪叉式液压升降平台。但不仅限于此,在其他实施例中还能根据实际的使用需求选用现有技术中的其他升降平台结构。升降机构3上设置有水平位移机构4,水平位移机构4上驱动设置有定位机械手46和吸附定位机构47。更具体的,水平位移机构4包括设置在升降机构3上部的位移机构一41和滑轨一以及滑动设置在滑轨一上的位移板一42,位移板一42上设置有位移机构二43和滑轨二,以及滑动设置在滑轨二上的位移板二44,位移板二44上设置有吸附定位机构47。位移板二44上还设置有位移机构三45和滑轨三,以及滑动设置在滑轨三上的角度调节座二52,且角度调节座二52与位移机构三45驱动连接,角度调节座二52上驱动设置有定位机械手46。位移板二44上还设置有位移机构三45和滑轨三以及滑动设置在滑轨三上的安装板三,安装板三上设置有定位机械手46的夹持气缸,定位机械手46的夹持气缸驱动连接有至少一对能相对开合的夹爪,夹爪的内侧设置有柔性垫8,且夹持的中部还设置有用于检测与显示屏6底边相对距离的距离传感器5。进一步的,距离传感器5的设置与柔性垫8的设置位置避开,防止柔性垫8遮挡距离传感器5的检测。定位机械手46位于吸附定位机构47前侧。进一步的位移机构一41、位移机构二43、位移机构三45分别采用的是现有技术中的直线电机与丝杆的组合机构驱动旋接在丝杆上的安装板一、安装板二、安装板三分别沿着轨道一或轨道二货轨道三进行直线位移,或采用的是现有技术中的位移气缸驱动安装板一、安装板二、安装板三分别沿着轨道一或轨道二货轨道三进行直线位移。但不仅限于此,在其他实施例中还可以采用其他的现有技术中直线位移机构驱动位移,调节定位机械手46和吸附定位机构47相对于驱动转盘2以及驱动底座1之间的相对位置关系。
25.进一步的,如图1~图3所示,驱动底座1的结构采用的是长条形结构,俯视结构如图2、图3所示,为了减少定位机械手46和吸附定位机构47向前位移的距离,获取显示屏6时,驱动底座1的长边侧与显示屏正面或背面对应,本实施例中采用的是驱动底座1的长边侧与显示屏的背面对应。然后驱动所述驱动转盘2将定位机械手46和吸附定位机构47的操作面转至显示屏6的背面,通过吸附定位机构47夹持显示屏6的底部,通过定位机械手46吸附住显示屏6的背面中部。获取装载好显示屏6后,显示屏6的屏幕与驱动底座1的长侧边平行,且位于驱动底座1的中间位置。具体的显示屏6 在搬运过程中的角度调节可根据实际的需求调整。驱动底座1的窄端作为前后行进的方向。且驱动底座1的具体的大小在此不再具体描述和限定,驱动底座1生产制备时可以根据实际需求进行调整。更进一步的,为了提升对外围环境的检测,在驱动底座1上部的四侧的边沿上分别设置有外部检测机构12以及距离传感器5进行外部状态环境的检测。
26.实施例二在实施例一的基础上,如图4所示,位移板二44上还设置有位移机构三45和滑轨三,以及滑动设置在滑轨三上的安装板三,安装板三上设置有角度调节座二52,且角度调节座二52与位移机构三45驱动连接,角度调节座二52上驱动设置有定位机械手46。角度调节座二52采用的是现有技术中的角度限位调节底座,实现对定位机械手46的角度的调节,便于调节定位机械手46夹持定位显示屏6的角度。即显示屏6在运载和使用时可以通过角度调
节座二52和角度调节座一472之间的角度配合调节,实现对显示屏6的前倾和后仰的角度调节。调节定位机械手46的下部通过平衡限位机构51与安装板三连接,平衡限位机构51采用现有技术中的阻尼机构,提升定位机械手46的平衡限位;使得角度调节座二52对定位机械手46在角度调节的过程中的稳定性,防止在复位时产生复位的惯性和缓冲冲击力。
27.实施例三在实施例一或实施例二的基础上,如图5~图7所示,驱动转盘2上设置有定位支架7,定位支架7位于定位机械手46以及吸附定位机构47的后方,定位支架7包括至少一对相对设置在驱动转盘2上的立杆72,立杆72通过底座71与驱动转盘2固定连接。相对设置的立杆72上横跨设置有至少一对能相对纵向开合的横杆73,横杆73上分别设置有至少一对能相对开合的定位支架座74,定位支架座74上设置有用于对接收纳显示屏6侧边或对角的限位槽741。
28.根据外部检测机构12以及距离传感器5的检测,设置在驱动转盘2上的定位支架7,支架7中的纵向开合机构721驱动横杆73向外展开,横杆73上设置的横向开合机构731驱动定位支架座74向外展开,四个定位支架座74展开的收纳区域大于显示屏6的外边框区域。通过定位机械手46和吸附定位机构47中的吸附盘473将显示屏6获取夹持定位在驱动底座1上,然后位置调整机构向后位移至定位支架7的正前方,且将夹持定位的显示屏6对应嵌入四个定位支架座74的收纳区域内。再反向操作定位支架7,使得显示屏6的四个角与定位支架座74的限位槽741对接嵌合,通过限位槽741内设置的软垫层抵靠。限位槽741采用的是l形结构的限位凹槽,限位凹槽的内壁中设置有l形的凹槽,且l形的凹槽内的表面固定嵌设有软垫层。
29.实施例四在实施例一至实施例三中任一实施例的基础上的一种对显示屏进行搬运的方法,采用显示屏搬运机器人进行调度搬运,搬运转移的方法包括以下步骤;a.通过驱动底座1上设置的外部检测机构12采集外部环境信息以及显示屏6的参数信息;b.驱动所述驱动底座1位移至显示屏6正面,通过驱动转盘2和位置调整机构调节定位机械手46和吸附定位机构47与显示屏6之间的相对位置;c.驱动定位机械手46位移至显示屏6的下方,打开定位机械手46的夹爪,夹持住显示屏6的下侧外壳的外边沿,通过吸附定位机构47吸附住显示屏6的背面,实现对显示屏6的获取定位。
30.d.复位位置调整机构,通过驱动转盘2调整显示屏6在环境中的角度,驱动底座1根据外部检测机构12以及距离传感器5将装载的显示屏6进行位置的转移。
31.e.驱动底座1转移装载的显示屏6,通过驱动转盘2和外部检测机构12以及距离传感器5实现转移过程中的避障操作。
32.工作原理:如图1~7所示,通过驱动底座1上设置的外部检测机构12采集外部环境信息以及显示屏6的参数信息。驱动所述驱动底座1位移至显示屏6正面,通过驱动转盘2和位置调整机构调节定位机械手46和吸附定位机构47与显示屏6之间的相对位置。驱动定位机械手46位移至显示屏6的下方,打开定位机械手46的夹爪,夹持住显示屏6的下侧外壳的外边沿,通过
吸附定位机构47吸附住显示屏6的背面,实现对显示屏6的获取定位。复位位置调整机构,通过驱动转盘2调整显示屏6在环境中的角度,驱动底座1根据外部检测机构12以及距离传感器5将装载的显示屏6进行位置的转移。
33.搬运的过程中驱动底座1可以通过驱动底座1的行走轮11调节驱动底座1的角度。同时还能通过驱动转盘2调节获取装载的显示屏6与驱动底座1之间的角度,便于驱动底座1装载显示屏6进行位置的转移。通过外围设置的外部检测机构12以及距离传感器5进行外部环境的检测,便于在转移过程中实现避障操作。减少驱动底座1上运载的显示屏6与外部的碰撞。
34.进一步的,在实施例二中,在位移机构三45通过角度调节座二52与定位机械手46驱动连接,通过角度调节座二52实现定位机械手46的前后转动的角度。角度调节座二52实现对定位机械手46的角度的调节,便于调节定位机械手46夹持定位显示屏6的角度。即显示屏6在运载和使用时可以通过角度调节座二52和角度调节座一472之间的角度配合调节,实现对显示屏6的前倾和后仰的角度调节。
35.进一步的,在实施例三中设置有定位支架7,通过定位支架7的开合动作实现四个定位支架座74展开的收纳区域的大小调节,同时通过四个定位支架座74的对显示屏6的包裹,实现对显示屏6的位置限定,以及显示屏6的外部边框的防护保护。
36.以上依据本发明的理想实施例为启示,通过上述的说明内容,相关人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1