一种手套机的抓取装置的制作方法
1.本发明涉及手套机的后处理设备,具体是手套机的抓取装置,用于整理和放置手套。
背景技术:
2.手套是日常生活中经常用到的保护用品,手套制造完成后,进入脱落、点数、叠放、包装工序。现有技术中存在这一工序的自动化设备,但这些设备不能按设定数量出整叠手套,只能靠人工补齐,限制了后续的自动化生产,且寿命很短,使用和维护成本很高。因此,提出本发明。
技术实现要素:
3.针对现有技术的上述技术问题,本发明的目的是提供一种手套机的抓取装置,其通过升降、抓取和落料,实现了手套脱落、叠放的自动化,且使用寿命长、生产成本低。
4.为达到上述目的,本发明是通过以下技术方案实现的:一种手套机的抓取装置,包括升降装置、翻转装置、抓取装置和落料装置,所述翻转装置连接在升降装置上,所述抓取装置连接在翻转装置上,所述落料装置与抓取装置配合工作。
5.所述的升降装置包括导轨一和通过驱动电机驱动的同步带轮,所述同步带轮连接有同步带,所述导轨一上设有滑块一,所述翻转装置与滑块一连接。
6.所述的翻转装置包括旋转台和安装在滑块一上的翻转电机,所述翻转电机的输出端设有主动齿轮,所述旋转台连接有从动齿轮,所述主动齿轮和从动齿轮啮合。
7.所述抓取装置包括抓取电机、旋转手臂和伸缩手臂, 所述旋转手臂的下方设有转轴,转轴上安装有摆臂,所述抓取电机的输出端设有凸轮,所述摆臂的一端位于凸轮上。
8.所述落料装置包括落料电机,所述落料电机的输出端设有传动齿轮,所述伸缩手臂上安装有齿臂,所述传动齿轮与齿臂啮合;所述旋转台上安装有导轨二,所述导轨二与齿臂连接,所述导轨二上设有滑块二,所述伸缩手臂通过滑块二在导轨二上滑动。
9.所述的升降装置包括电机安装板和导轨安装板,所述驱动电机安装在电机安装板上,所述的导轨一安装在导轨安装板上。
10.所述的旋转台内设有旋转轴一和旋转轴二,所述旋转轴一将导轨二连接至旋转台上,所述旋转轴二将摆臂连接至旋转台上,所述旋转手臂连接在摆臂上。
11.所述滑块一上连接有联接座,所述旋转台与联接座连接。
12.所述同步带轮上设有同步带轮固定座和皮带联接板,所述导轨一安装在同步带轮固定座上,所述翻转电机安装在皮带联接板上,并通过压板固定。
13.所述的摆臂和齿臂上均设有拉簧柱,所述拉簧柱设置有拉簧。
14.本发明的有益效果如下:本发明手套机的抓取装置,通过驱动电机驱动旋转手臂和伸缩手臂的升降,通过
抓取电机驱动旋转手臂实现对手套的抓取,通过翻转电机实现旋转手臂和伸缩手臂的翻转落料,最后通过落料电机实现旋转手臂和伸缩手臂的伸缩,实现了手套抓取、落料和叠放的自动化,且使用寿命长,成本低。
附图说明
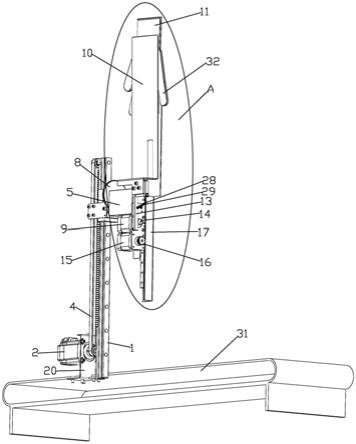
15.图1为本发明的结构示意图;图2为本发明的爆炸结构示意图;图3为本发明中的旋转手臂和伸缩手臂翻转后的结构示意图;图4为图1中的a部放大结构示意图;图5为本发明安装在手套机上的示意图;其中,1为导轨一、2为驱动电机、3为同步带轮、4为同步带、5为旋转台、6为翻转电机、7为主动齿轮、8为从动齿轮、9为抓取电机、10为旋转手臂、11为伸缩手臂、12为转轴、13为摆臂、14为凸轮、15为落料电机、16为传动齿轮、17为齿臂、18为导轨二、19为滑块二、20为电机安装板、21为导轨安装板、22为旋转轴一、23为旋转轴二、24为联接座、25为同步带轮固定座、26为皮带联接板、27为压板、28为拉簧柱、29为拉簧、30为滑块一、31为传输装置、32为手套、33为手套机、34为抓移电机座、35为滑槽。
具体实施方式
16.下面结合具体实施例对本发明作进一步的说明,但本发明的保护范围并不限于此。
17.如图1
‑
5所示,本实施例手套机的抓取装置,包括升降装置、翻转装置、抓取装置和落料装置,翻转装置连接在升降装置上,抓取装置连接在翻转装置上,落料装置与抓取装置配合工作。
18.进一步设置的,升降装置包括电机安装板20和导轨安装板21,驱动电机2安装在电机安装板20上,导轨一1安装在导轨安装板21上,并与同步带轮固定座25固定。同步带轮3通过驱动电机2驱动,同步带轮3连接有同步带4,导轨一1上设有滑块一30,滑块一30上连接有联接座24,旋转台5与联接座24连接。同步带轮3上设有皮带联接板26,翻转电机6安装在皮带联接板26上,通过压板27固定,并与滑块一30固定。翻转电机6的输出端设有主动齿轮7,旋转台5连接有从动齿轮8,主动齿轮7和从动齿轮8啮合。
19.抓取装置包括抓取电机9、旋转手臂10和伸缩手臂11,旋转手臂10的下方设有转轴12,转轴12上安装有摆臂13,旋转台5内设有旋转轴二23,旋转轴二23将摆臂13连接至旋转台5上,旋转手臂10连接在摆臂13上。抓取电机9的输出端设有凸轮14,摆臂13的一端位于凸轮14上。凸轮14转动时,将摆臂13抬起,使得旋转手臂10向外旋转,将手套32脱落;需要抓取时,反向转动凸轮14,使得摆臂13压下,完成抓取。进一步设置的,摆臂13和齿臂17上均设有拉簧柱28,拉簧柱28设置有拉簧29,手套32抓取和脱落后,依靠拉簧29的拉力使其复位。
20.落料装置包括落料电机15,落料电机15的输出端设有传动齿轮16,伸缩手臂11上安装有齿臂17,传动齿轮16与齿臂17啮合;旋转台5内设有旋转轴一22,旋转轴一22将导轨二18连接至旋转台5上,导轨二18与齿臂17连接,导轨二18上设有滑块二19,伸缩手臂11通过滑块二19在导轨二18上滑动。
21.进一步设置的,本发明中设置有抓移电机座34,抓取电机9和落料电机15并排安装在抓移电机座34上,抓移电机座34开设有两个孔,凸轮14和传动齿轮16均伸出孔外。
22.进一步设置的,旋转手臂10上设有滑槽35,齿臂17随着旋转台5翻转后,在传动齿轮16的传动下,通过滑槽35运动。
23.本发明使用时安装在手套机上33出料的位置,旋转手臂10和伸缩手臂11刚好位于手套32出料口,与传输装置31配合,将手套32抓取、夹持后落入传输装置31上,通过传输装置31输送至收纳箱即可。
24.工作时,驱动电机2驱动同步带4传动,带动滑块一30沿着导轨一1上升,到达手套32的位置后,驱动抓取电机9,凸轮14转动,使得摆臂13压下,旋转手臂10随之压下,完成手套32的抓取。然后,滑块一30下降设定高度,翻转电机6工作,主动齿轮7带动从动齿轮8,实现旋转台5的转动,从而将旋转手臂10和伸缩手臂11旋转设定角度(以90度为例),此时滑块一30沿着导轨一1下降,当手套到达传输装置31上方时,再次驱动抓取电机9,使得凸轮14反向转动,旋转手臂10被抬起,将手套32下落至传输装置31上。此时导轨二18和齿臂17在旋转台5的转动下呈约水平状态,驱动落料电机15,传动齿轮16沿着齿臂17运动,从而带动伸缩手臂11运动,到达指定的位置,手套32落料完成,完成一次手套32的抓取。
25.本发明精简了机构,实现了手套抓取、落料和叠放的自动化,且使用寿命长,成本低。
26.上述实施例仅用于解释说明本发明的发明构思,而非对本发明权利保护的限定,凡利用此构思对本发明进行非实质性的改动,均应落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1