带粘贴装置的制作方法
1.本发明涉及在具有圆形的开口部的环状框架上粘贴粘接带而封闭该开口部,并且在露出于该开口部的粘接带上粘贴基板的带粘贴装置。
背景技术:
2.在移动电话或计算机等电子设备中使用的器件芯片是通过将在正面上排列形成有多个器件的半导体晶片等基板按照每个器件进行分割而形成的。作为对基板进行分割的装置,公知有利用圆环状的切削刀具对基板进行切削的切削装置和向被加工物照射激光束而进行激光加工的激光加工装置。
3.在利用切削装置或激光加工装置等加工装置进行加工的基板上预先粘贴被称为划片带或扩展带的圆形的粘接带。而且,粘接带的外周部粘贴于在中央形成有开口部的环状框架的内周部。即,将基板、粘接带以及环状框架一体化而形成框架单元。然后,在框架单元的状态下将基板搬入到加工装置而进行加工。
4.组装成框架单元的状态的基板容易进行处理。另外,当在将基板分割之后使粘接带沿外周方向扩展时,由基板形成的芯片彼此的间隔扩大,芯片的拾取变得容易。这里,公知有在基板和环状框架上粘贴粘接带而形成框架单元的带粘贴装置(参照专利文献1)。
5.带粘贴装置具有保持单元,该保持单元具有对基板进行保持的基板保持部和在该基板保持部的周围对环状框架进行保持的环状框架保持部。而且,在利用带粘贴装置将粘接带粘贴于环状框架和基板时,利用基板保持部对基板进行保持,利用环状框架保持部对环状框架进行保持,使粘接带从上方面对基板和环状框架。然后,使辊在粘接带上滚动而按压该粘接带,使粘接带粘贴于基板和环状框架。
6.专利文献1:日本特开2011-236024号公报
7.带粘贴装置有时在依次形成多个框架单元时会产生某种故障而停止。例如,在环状框架保持于环状框架保持部时带粘贴装置发生了停止时,如果不取出该环状框架而再次启动该带粘贴装置,则会在已经搬入的环状框架上叠放新的环状框架。在该状态下,环状框架的被粘贴面比基板的被粘贴面大幅向上方突出。
8.在实施粘接带的粘贴时,在环状框架的被粘贴面的高度比基板的被粘贴面的高度高的情况下,无法利用辊以足够的力将粘接带粘贴于基板,粘接带会在气泡进入到基板与粘接带之间的状态下粘贴于基板。即使将在粘接带与基板之间存在气泡的框架单元搬入到加工装置,也无法适当地加工该基板。
技术实现要素:
9.本发明是鉴于上述问题而完成的,其目的在于,提供能够防止环状框架的叠放的带粘贴装置。
10.根据本发明的一个方式,提供一种带粘贴装置,其通过具有粘接面的粘接带使中央具有开口部的环状框架和配置于该环状框架的该开口部的板状的基板一体化,其特征在
于,该带粘贴装置具有:保持单元,其具有对该环状框架进行保持的环状的框架保持部和对该基板进行保持的基板保持部,该基板保持部配置于中央形成有开口的该框架保持部的该开口中;带粘贴单元,其使该粘接带的该粘接面面对该框架保持部所保持的该环状框架和该基板保持部所保持的该基板,一边利用辊从上方按压该粘接带一边将该粘接带粘贴于该环状框架和该基板上;以及控制单元,其对该框架保持部进行控制,该框架保持部具有从上表面突出并且能够沿与该上表面平行的方向进退的可动部,能够通过使该可动部与载置于该上表面的该环状框架抵接而将该环状框架移动到规定的位置,该框架保持部具有传感器,该传感器能够检测该可动部是否被定位于当该环状框架定位于该规定的位置时的该可动部的停止位置上,关于该控制单元,在使该可动部进退时,在该可动部未与该环状框架抵接而未停止于该停止位置的情况下,判定为在该框架保持部的该上表面上不存在该环状框架,在该可动部与该环状框架抵接而停止于该停止位置的情况下,判定为在该框架保持部的该上表面上存在该环状框架。
11.优选该可动部具有与该环状框架的侧面抵接的两根销。
12.另外,根据本发明的另一方式,提供一种带粘贴装置,其通过具有粘接面的粘接带使中央具有开口部的环状框架和配置于该环状框架的该开口部的板状的基板一体化,其特征在于,该带粘贴装置具有:保持单元,其具有对该环状框架进行保持的环状的框架保持部和对该基板进行保持的基板保持部,该基板保持部配置于中央形成有开口的该框架保持部的该开口中;带粘贴单元,其使该粘接带的该粘接面面对该框架保持部所保持的该环状框架和该基板保持部所保持的该基板,一边利用辊从上方按压该粘接带一边将该粘接带粘贴于该环状框架和该基板上;以及控制单元,其对该框架保持部进行控制,该框架保持部具有:第1固定部,其从上表面突出,限制该环状框架沿与该上表面平行的第1方向的移动;第2固定部,其从该上表面突出,限制该环状框架沿与该第1方向垂直的第2方向的移动;第1可动部,其从该上表面突出,与该第1固定部对置且沿该第1方向进退,从而与该第1固定部之间夹持该环状框架;以及第2可动部,其从该上表面突出,与该第2固定部对置且沿该第2方向进退,从而与该第2固定部之间夹持该环状框架,该框架保持部能够通过利用该第1固定部和该第1可动部夹持该环状框架并利用该第2固定部和该第2可动部夹持该环状框架而将该环状框架定位于规定的位置,该框架保持部还具有传感器,该传感器能够检测该第1可动部是否被定位于当该环状框架定位于该规定的位置时的该第1可动部的停止位置上,关于该控制单元,在使该第1可动部进退时,在该第1可动部未与该环状框架抵接而未停止于该停止位置的情况下,判定为在该框架保持部的该上表面上不存在该环状框架,在该第1可动部与该环状框架抵接而停止于该停止位置的情况下,判定为在该框架保持部的该上表面上存在该环状框架。
13.优选提供第3方式所记载的带粘贴装置,其特征在于,该第1可动部或该第2可动部具有与该环状框架的侧面抵接的两根销。
14.在本发明的一个方式的带粘贴装置中,对环状框架进行保持的框架保持部具有能够沿与上表面平行的方向进退的可动部,能够通过使该可动部与载置于该上表面的环状框架抵接而将该环状框架移动到规定的位置。这里,框架保持部具有传感器,该传感器能够检测该可动部是否被定位于当环状框架被定位于该规定的位置时的可动部的停止位置上。
15.因此,在使可动部进退时,在该可动部与环状框架抵接而停止于该停止位置的情
scale integration:大规模集成电路)等多个器件9。当利用切削装置或激光加工装置等加工装置将基板1按照每个器件9进行分割时,能够形成各个器件芯片。在将基板1搬入到加工装置时,例如在基板1的背面1b侧粘贴具有比该基板1大的直径的粘接带5。
30.粘接带5被称为划片带。在图5中包含示意性地示出从剥离带7剥离并向基板1等上粘贴的粘接带5的剖视图。粘接带5包含具有挠性的膜状的基材层5b。基材层5b由po(聚烯烃)、pet(聚对苯二甲酸乙二醇酯)、pvc(聚氯乙烯)、ps(聚苯乙烯)等形成。在基材层5b的一个面上设置有粘接层(糊层)(未图示)。
31.该粘接层分别由紫外线固化型的硅橡胶、丙烯酸系材料、环氧系材料等形成。该粘接层粘贴于基板1的背面1b侧。而且,粘接层露出的面成为粘接带5的粘接面5a。通过将粘接带5粘贴于基板1,能够缓和加工、搬送等时对基板1的冲击,从而能够减少基板1的损伤。
32.在粘接带5的外周部上粘贴有由铝、不锈钢等金属形成的环状框架3的内周部。环状框架3具有直径比基板1的直径大的开口部3c,正面3a和背面3b平坦。在将基板1定位于环状框架3的开口部3c的大致中央的状态下,在基板1的背面1b侧和环状框架3的背面3b上粘贴粘接带5,从而形成框架单元11。
33.接着,对在基板1和环状框架3上粘贴粘接带5的带粘贴装置进行说明。图1是示意性地示出带粘贴装置2的立体图。带粘贴装置2具有对各结构要素进行支承的基台4。
34.在基台4的前端沿着y轴方向排列配设有盒载置台6a、6b、6c。例如,基板1以收纳在放置于盒载置台6a的盒8a中的状态被搬入到带粘贴装置2,环状框架3以收纳在放置于盒载置台6b的盒8b中的状态被搬入到带粘贴装置2。
35.另外,由带粘贴装置2制成的框架单元11被收纳在放置于盒载置台6c的盒8c中。而且,通过将盒8c搬出而将由带粘贴装置2制成的多个框架单元11从带粘贴装置2搬出。在图2中,用虚线表示收纳在各盒8a、8b、8c中的各收纳物10a、10b、10c。
36.带粘贴装置2在与盒载置台6a、6b、6c相邻的位置形成有在y轴方向上长的开口4a。在开口4a中分别以能够沿着y轴方向移动的方式收纳有对环状框架3和框架单元11进行搬送的第1搬送单元12a和对基板1进行搬送的第2搬送单元12b。
37.第1搬送单元12a具有:移动支承部14a,其能够沿着y轴方向移动;臂部16a,其一端以能够旋转的方式固定于移动支承部14a;以及支承部18a,其设置于臂部16a的另一端。第1搬送单元12a是多关节机器人,能够使臂部16a伸缩和旋转而使支承部18a移动。
38.第1搬送单元12a利用支承部18a对收纳在放置于盒载置台6b的盒8b中的环状框架3进行支承,将该环状框架3从盒8b中搬出并载置于后述的保持单元24。另外,第1搬送单元12a利用支承部18a对载置形成于保持单元24的框架单元11进行支承,并向放置于盒载置台6c的盒8c搬送。
39.第2搬送单元12b具有:移动支承部14b,其能够沿着y轴方向移动;臂部16b,其一端以能够旋转的方式固定于移动支承部14b;以及支承部18b,其设置于臂部16b的另一端。第2搬送单元12b是多关节机器人,能够使臂部16b伸缩和旋转而使支承部18b移动。第2搬送单元12b利用支承部18b对收纳在放置于盒载置台6a的盒8a中的基板1进行支承,将该基板1从盒8a中搬出并载置于后述的保持单元24。
40.在基台4的与开口4a相邻的位置设置有移动单元20和保持单元24,该移动单元20使保持单元24沿着与y轴方向垂直的x轴方向移动,该保持单元24被该移动单元20支承。移
动单元20具有沿着x轴方向的一对导轨22a。保持单元24被导轨22a支承为能够沿着x轴方向移动。
41.移动单元20还具有:与导轨22a平行的滚珠丝杠22b,其与设置于保持单元24的下表面的螺母部(未图示)螺合;以及脉冲电动机22c,其与滚珠丝杠22b的一端连接。脉冲电动机22c能够使滚珠丝杠22b进行旋转。当滚珠丝杠22b进行旋转时,保持单元24沿着x轴方向移动。
42.移动单元20使保持单元24在近前侧的搬出搬入区域与里侧的带粘贴区域之间移动。在搬出搬入区域中,实施基板1和环状框架3向保持单元24的搬入以及框架单元11的搬出。另外,在带粘贴区域中,实施后述的带粘贴单元44所进行的粘接带5的粘贴。
43.图2是示意性地示出带粘贴单元44和移动到带粘贴区域的保持单元24的立体图。接着,对保持单元24和带粘贴单元44进行说明。
44.保持单元24具有对环状框架3进行保持的环状的框架保持部26和对基板1进行保持的基板保持部30。在框架保持部26的上表面28的中央形成有开口,基板保持部30配置于框架保持部26的该开口。在保持单元24被定位于搬出搬入区域时,通过第1搬送单元12a将环状框架3搬送到框架保持部26上,通过第2搬送单元12b将基板1搬送到基板保持部30上。
45.图4是示意性地示出将基板1和环状框架3载置于保持单元24的情形的立体图。此时,环状框架3的要粘贴粘接带5的背面3b侧朝向上方,并且基板1的要粘贴粘接带5的背面1b侧朝向上方。即,使环状框架3的正面3a侧面对框架保持部26,使基板1的正面1a侧面对基板保持部30。但是,粘接带5也可以粘贴于环状框架3的正面3a和基板1的正面1a。
46.在上表面上放置了基板1和环状框架3之后,保持单元24被送到带粘贴区域。为了能够将粘接带5适当地粘贴于环状框架3,在保持单元24的上表面上调整环状框架3的位置。框架保持部26能够调整放置于上表面28的环状框架3的位置。
47.框架保持部26具有第1固定部36,该第1固定部36从上表面28突出,限制环状框架3沿与该上表面28平行的第1方向(例如x轴方向)的移动。第1固定部36例如形成为沿着与第1方向垂直的第2方向(例如y轴方向)长的形状,限制从第1方向抵接的环状框架3的移动。
48.另外,框架保持部26具有第1可动部34,该第1可动部34从上表面28突出,与第1固定部36对置且在该第1方向上进退,从而在与第1固定部36之间夹持环状框架3。第1可动部34设置于隔着基板保持部30而与第1固定部36对置的位置,例如具有从框架保持部26的上表面28突出的两根销32。
49.在框架保持部26的上表面28上形成有沿着第1方向的形状的2个孔,各个销32从该孔向上方突出。保持单元24在内部具有使销32沿着该孔移动的移动机构。图3是示意性地示出使第1可动部34沿着第1方向移动的移动机构72的立体图。
50.移动机构72具有:沿着第2方向的支承部58,其在比框架保持部26的上表面28靠下方的位置对2个销32进行支承;以及移动体60,其与该支承部58的一端连接。另外,移动机构72具有气缸66,该气缸66包含:活塞杆64,其前端与移动体60连接;和缸筒62,其收纳该活塞杆64的基端侧。
51.气缸66在内部空间具有能够沿着第1方向移动的活塞(未图示)。该活塞将缸筒62的内部空间前后隔开。而且,当在活塞的前后对该内部空间施加气压差时,该活塞前后移动。活塞杆64的基端与活塞连接,当使活塞移动时,活塞杆64、移动体60以及支承部58沿着
第1方向移动,销32沿着第1方向进退。
52.另外,框架保持部26具有第2固定部42,该第2固定部42从上表面28突出,限制环状框架3沿与该上表面28平行的第2方向(例如y轴方向)的移动。第2固定部42例如形成为沿着第1方向长的形状,限制从第2方向抵接的环状框架3的移动。
53.另外,框架保持部26具有第2可动部40,该第2可动部40从上表面28突出,与第2固定部42对置且在该第2方向上进退,从而在与第2固定部42之间夹持环状框架3。第2可动部40设置于隔着基板保持部30而与第2固定部42对置的位置,例如具有从框架保持部26的上表面28突出的2根销38。
54.在框架保持部26的上表面28上形成有沿着第2方向的形状的2个孔,各个销38从该孔向上方突出。保持单元24在内部具有使销38沿着该孔移动的移动机构。该移动机构是与使第1可动部34移动的移动机构72相同的结构,因此省略说明。
55.在调整放置于框架保持部26的上表面28上的环状框架3的位置时,首先,使第1可动部34的2个销32沿着第1方向移动而与环状框架3的侧面抵接,利用第1固定部36和该第1可动部34夹持环状框架3。接着,使第2可动部40的两个销38沿着第2方向移动而与环状框架3的侧面抵接,利用第2固定部42和第2可动部40夹持环状框架3。此时,环状框架3通过第1可动部34和第2可动部40而移动。
56.在框架保持部26中,按照将环状框架3定位于适于粘接带5的粘贴的规定的位置的方式确定第1固定部36、第1可动部34、第2固定部42以及第2可动部40的位置。
57.接着,对将粘接带5粘贴于环状框架3和基板1上的带粘贴单元44进行说明。在图2中包含示意性地示出带粘贴单元44的立体图。在图5中包含示意性地示出带粘贴单元44的剖视图。
58.带粘贴单元44具有:带提供辊46,其卷绕而收纳有被支承于剥离带7的状态的多个粘接带5;以及卷绕辊56,其卷绕而回收剥离了粘接带5的剥离带7。粘接带5例如在被切成封闭环状框架3的开口部3c的规定的形状的状态下被支承于剥离带7。这里,粘接带5的直径比开口部3c大且比环状框架3的外径小。
59.带粘贴单元44还具有:引导辊48,其对从带提供辊46拉出的剥离带7进行引导;以及剥离部52,其使由引导辊48引导的剥离带7弯折而从粘接带5剥离。另外,带粘贴单元44具有对由剥离部52从粘接带5剥离的剥离带7进行引导的引导辊54。
60.而且,带粘贴单元44还具有按压辊50,该按压辊50能够在保持单元24的上方升降,从上方按压被剥离部52剥离了剥离带7的粘接带5而粘贴于被粘贴物。这里,按压辊50通过使带粘贴单元44升降而按压粘接带5。或者,保持单元24也可以能够升降,也可以通过保持单元24上升而由按压辊50从上方相对地按压粘接带5。
61.另外,带粘贴单元44具有卷绕而回收从粘接带5剥离并被引导辊54引导的剥离带7的卷绕辊56。带粘贴单元44使带提供辊46、各引导辊48、54以及卷绕辊56联动地进行旋转,在使剥离带7从带提供辊46移动到卷绕辊56的期间向被粘贴物提供粘接带5。
62.接着,使用图5对在保持单元24所保持的环状框架3和基板1上粘贴粘接带5的步骤进行说明。首先,使移动单元20进行动作而使保持单元24向带粘贴区域行进。此时,将位于带粘贴装置2的前侧(行进方向(x轴方向)的后方侧)的环状框架3的端部定位于带粘贴单元44的按压辊50的下方。
63.然后,使带粘贴单元44下降至规定的高度,使卷绕辊56等进行旋转,利用剥离部52将剥离带7从粘接带5剥离。之后,在使露出的粘接带5的粘接面5a面对环状框架3的背面3b的状态下,将粘接带5粘贴于环状框架3上。进而,一边利用按压辊50从上方按压粘接带5的已粘贴于环状框架3的部分,一边通过移动单元20使保持单元24向带粘贴装置2的前侧(行进方向的后方侧)移动。
64.于是,从环状框架3的端部至另一端,粘接带5的粘接面5a依次与环状框架3的背面3b接触,粘接带5依次被按压辊50按压,粘接带5逐渐粘贴于环状框架3。此时,当基板1的背面1b接近按压辊50的下方时,粘接带5也粘贴在基板1的背面1b上。
65.另外,为了使粘接带5不产生褶皱等,使从带提供辊46向卷绕辊56移动的剥离带7的各部分的移动速度与通过移动单元20而移动的保持单元24的移动速度一致。然后,当按压辊50到达环状框架3的另一端时,完成粘接带5向环状框架3和基板1的粘贴。
66.当一边利用按压辊50进行按压一边将粘接带5粘贴于环状框架3和基板1上时,气泡不会进入粘接带5与环状框架3和基板1之间,粘接带5也不会产生褶皱。因此,形成适于被搬入对基板1进行加工的加工装置的框架单元11。
67.此时,为了能够利用按压辊50将粘接带5适当地按压于环状框架3和配置于该环状框架3的开口部3c的内部的基板1上,环状框架3的背面3b的高度与基板1的背面1b的高度最好一致。例如,优选保持单元24能够变更基板保持部30的高度。而且,在环状框架3和基板1的厚度互不相同的情况下,最好调整基板保持部30的高度而使彼此的背面3b、1b的高度一致。
68.另外,在带粘贴单元44中,也可以不使用剥离带7。例如,在带提供辊46上卷绕有长带状的粘接带5,在粘贴于环状框架3和基板1上之后,在环状框架3的内周缘与外周缘之间在整周范围内将粘接带5切断。在该情况下,带粘贴单元44具有能够在环状框架3的背面3b上切断粘接带5的切割器。
69.在将基板1、环状框架3以及粘接带5一体化而形成框架单元11之后,使移动单元20进行动作而使保持单元24移动到搬出搬入区域。然后,通过第1搬送单元12a将框架单元11从保持单元24搬送到载置于盒载置台6c的盒8c中。
70.带粘贴装置2还具有控制单元2a,该控制单元2a对各盒载置台6a、6b、6c、各搬送单元12a、12b、移动单元20、保持单元24、带粘贴单元44等各结构要素进行控制。
71.控制单元2a由包含cpu(central processing unit:中央处理单元)等处理装置和闪存等存储装置的计算机构成。通过按照存储在存储装置中的程序等软件使处理装置进行动作,控制单元2a作为软件与处理装置(硬件资源)协作的具体的单元而发挥功能。
72.控制单元2a例如按照自动程序控制各结构要素,以便依次形成多个框架单元11。当执行自动程序时,收纳在盒8a中的多个基板1和收纳在盒8b中的多个环状框架3通过粘接带5而依次一体化,形成多个框架单元11并收纳在盒8c中。
73.这里,在带粘贴装置2中,存在在执行自动程序的期间产生某种故障而功能停止的情况。例如,有时在环状框架3保持于框架保持部26时,带粘贴装置2停止。在该情况下,当不取出该环状框架3而再次启动该带粘贴装置2时,在重新开始基于自动程序的框架单元11的形成时,会在残留的环状框架3上叠放新的环状框架3。
74.因此,会通过带粘贴单元44将粘接带5粘贴于基板保持部30所保持的基板1和该新
的环状框架3上。在该状态下,环状框架3的被粘贴面(背面3b)按照残留的环状框架3的厚度比基板1的被粘贴面(背面1b)向上方突出。
75.在实施粘接带5的粘贴时,在环状框架3的被粘贴面的高度比基板1的被粘贴面的高度高的情况下,会利用环状框架3对按压辊50进行支承,因此无法利用按压辊50以足够的力将粘接带5按压于基板1。在该情况下,粘接带5会在气泡进入到基板1与粘接带5之间的状态下粘贴于基板1上。即使将在粘接带5与基板1之间存在气泡的框架单元11搬入到加工装置,也无法适当地加工基板1。
76.而且,即使是在已形成了不适当的框架单元11之后,只要不去除残留的环状框架3,则在带粘贴装置2中,会在此后形成的全部框架单元11中产生这样的问题。而且,在执行自动程序的期间没有察觉这样的瑕疵情况的机会。即,继续形成框架单元11的瑕疵品直至收纳了盒8c的规定数量的框架单元11而自动程序结束,损害非常大。
77.因此,在本实施方式的带粘贴装置2中,在实施粘接带5向基板1和环状框架3的粘贴之前,对是否存在残留于保持单元24的框架保持部26的环状框架3进行确认。以下,以有助于残留的环状框架3的检测的结构为中心,对本实施方式的带粘贴装置2继续进行说明。
78.带粘贴装置2的框架保持部26还具有传感器,该传感器能够检测第1可动部34是否被定位于当环状框架3被该第1可动部34定位于规定的位置时的该第1可动部34的停止位置上。例如,如图3所示,在框架保持部26的移动机构72中,在气缸66的外周设置有自动开关68作为该传感器。
79.关于作为该传感器发挥功能的自动开关68,例如当在气缸66的内部的空间中沿前后方向移动的活塞(未图示)被定位于检测位置时,能够检测为该活塞被定位于该检测位置。例如,在活塞中组装有磁铁,自动开关68检测由该磁铁产生的磁场。
80.这里,该检测位置是指:在环状框架3载置于框架保持部26上时,第1可动部34已被定位于适于实施该环状框架3与粘接带5的粘贴的位置时的该活塞的位置。在使移动机构72进行动作而使第1可动部34移动时,在环状框架3载置于框架保持部26上的情况下,环状框架3与固定部36抵接而停止,该活塞在该检测位置停止。因此,自动开关(传感器)68检测该活塞处于该检测位置。
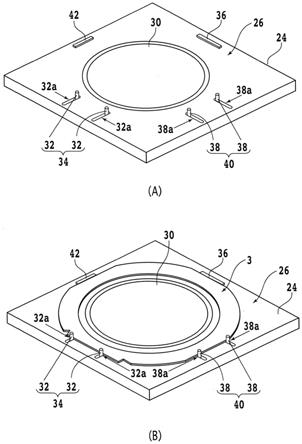
81.因此,在本实施方式的带粘贴装置2中,形成框架单元11时,在从盒8b向保持单元24的框架保持部26搬送环状框架3之前,利用自动开关68确认有无残留的环状框架3。图7的(a)和图7的(b)是示意性地示出实施关于残留环状框架3的确认动作时的保持单元24的立体图。
82.图7的(a)是示意性地示出不存在残留的环状框架3的情况下的框架保持部26的立体图。而且,图7的(b)是示意性地示出存在残留的环状框架3的情况下的框架保持部26的立体图。
83.如图7的(b)所示,在框架保持部26上残留有环状框架3的情况下,当使第1可动部34移动时,被第1可动部34推压的环状框架3与固定部36碰撞而停止,第1可动部34(销32)停止。此时,销32停止于环状框架3被定位于适于粘接带5的粘贴的规定位置时的停止位置32a。当使用自动开关(传感器)68时,能够检测为第1可动部34的销32停止在该停止位置32a。
84.例如,包含自动开关68的气缸66经由布线70而与控制单元2a(参照图1)连接。控制
单元2a控制气缸66,并且经由布线70接收自动开关(传感器)68的检测结果。而且,控制单元2a在使第1可动部34进退时,在该第1可动部34与环状框架3抵接而在停止位置32a上停止的情况下,判定为在框架保持部26的上表面28存在环状框架3。
85.即,检测为存在残留于框架保持部26的环状框架3。在该情况下,控制单元2a向带粘贴装置2的使用者等发出警告而催促去除残留的环状框架3。或者,控制第1搬送单元12a,将残留的环状框架3从框架保持部26去除,并收纳于盒8b等中。或者,不将新的环状框架3向框架保持部26搬出,在残留的环状框架3和基板1上粘贴粘接带5而形成框架单元11。
86.另一方面,如图7的(a)所示,在框架保持部26上未残留有环状框架3的情况下,当使第1可动部34的销32移动时,该第1可动部34的该销32会通过停止位置32a。即,自动开关(传感器)68检测为第1可动部34的销32未停止于该停止位置32a。
87.而且,控制单元2a在使第1可动部34进退时,在该第1可动部34未与环状框架3抵接而未停止于停止位置32a的情况下,判定为在框架保持部26的上表面28上不存在环状框架3。在该情况下,控制单元2a如通常那样开始自动程序,将环状框架3和基板1搬送到保持单元24并粘贴粘接带5而形成框架单元11。
88.如以上说明的那样,在本实施方式的带粘贴装置2中,在将环状框架3搬送到保持单元24的框架保持部26之前,能够确认是否在框架保持部26上存在残留的环状框架3。因此,不会在残留的环状框架3上叠放新的环状框架3,也不会形成不适于向加工装置搬入的框架单元11。
89.另外,本发明并不限定于上述实施方式的记载,能够进行各种变更来实施。例如,在上述实施方式中,对利用自动开关(传感器)68检测沿着第1方向(x轴方向)移动的第1可动部34的销32是否停止于停止位置32a而检测有无残留的环状框架3的情况进行了说明。但是,本发明的一个方式并不限定于此。
90.例如,保持单元24的框架保持部26也可以具有第2传感器,该第2传感器能够检测第2可动部40的销38是否被定位于当环状框架3被定位于规定的位置时的第2可动部40的销38的停止位置38a上。在该情况下,例如,可以将与上述自动开关68同样地构成的第2自动开关(未图示)设置于框架保持部26。而且,可以利用该第2传感器来判定有无残留的环状框架3。
91.另外,在上述实施方式中,对通过利用可动部34、40和固定部36、42夹持环状框架3而使环状框架3移动到适于粘接带5的粘贴的规定位置的情况进行了说明。但是,本发明的一个方式并不限定于此。例如,保持单元24的框架保持部26也可以具有联动移动部(未图示)来代替固定部36、42,该联动移动部与可动部34、40联动而分别向与该可动部34、40相反的方向移动。
92.在该情况下,框架保持部26也能够通过利用可动部34、40和该联动移动部夹持环状框架3而将该环状框架3移动到框架保持部26的上表面28的规定位置。而且,还可以在框架保持部26上设置有能够检测该联动移动部是否被定位于特定的停止位置的传感器,来代替能够检测可动部34、40是否被定位于停止位置38a、38b的传感器。该传感器能够用于判定有无残留的环状框架3。
93.此外,在上述实施方式中,对在框架保持部26上设置有使环状框架3沿第1方向移动的第1可动部34和使环状框架3沿与第1方向垂直的第2方向移动的第2可动部40的情况进
行了说明。但是,本发明的一个方式并不限定于此。例如,也可以在框架保持部26上设置有朝向基板保持部30的中心相互在60
°
不同的方向上进退的3个可动部,还可以设置有4个以上的可动部。
94.在该情况下,通过使所有的可动部进行动作而使载置于框架保持部26的上表面28的环状框架3移动,能够将该环状框架3移动到适于粘接带5的粘贴的规定位置。而且,在该情况下,当在至少一个可动部上设置有能够检测该可动部是否被定位于规定的停止位置的传感器时,能够判定有无残留的环状框架3。
95.因此,在本发明的一个方式的带粘贴装置2中,只要在保持单元24的框架保持部26所包含的至少一个可动部上具有能够检测该可动部是否停止于规定的停止位置的传感器即可。
96.除此以外,上述实施方式和变形例的构造、方法等能够在不脱离本发明的目的的范围内进行适当变更来实施。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1