一种传菜撤菜一体系统的制作方法
1.本发明涉及传菜领域,尤其涉及一种传菜撤菜一体系统。
背景技术:
2.现有的传菜机器有:传菜机器人通常身高1.2
‑
1.3米,行进平稳,可以实现餐厅中端盘送餐的服务,是所有服务型机器人中技术较为成熟的产品。传菜机器人可以按照预先制定好的路线,采用有轨或者无轨的形式,按指令端盘送餐到指定桌台,发出语音提示后由顾客或者服务员将餐盘转移到餐桌。也可以加挂推车,完成餐厅中的简单重复的体力工作。机器人行进平稳,可以实现人机互动,遇到障碍会提前自动停止而不会触碰到障碍物,同时发出语音提示。但是还存在以下的缺点:
3.1、传感器太少,或者性能不够,不能很好的感知外界物体状态。
4.2、现在一些工业机器人还是会出现故障,伤及物体和工人。
5.3、造价昂贵。
6.为解决上述问题,本技术中提出一种传菜撤菜一体系统。
技术实现要素:
7.(一)发明目的
8.为解决背景技术中存在的技术问题,本发明提出一种传菜撤菜一体系统,本发明减少人员的使用,降低经营成本,同时提高效率。
9.(二)技术方案
10.为解决上述问题,本发明提供了一种传菜撤菜一体系统,包括传送带和管路盒,所述传送带上设有推动机构;
11.所述管路盒上开设有开口,所述管路盒处设有抬升转换机构;
12.所述管路盒的一侧形成放入口,且管路盒的内部放置有运动小车;
13.所述管路盒的底部设有若干个通口,且通口处设有竖直移动机构;
14.所述管路盒的下方设有桌子,所述桌子内设有机器视觉机械手,所述桌子上安装有控制面板,且控制面板与机器视觉机械手通讯连接;
15.所述传送带上设有控制器,所述控制器通过无线通讯模块与运动小车,所述控制器与传送带和推动机构通讯连接。
16.优选的,所述推动机构包含菱形伸缩梯和推块组成,所述菱形伸缩梯固定安装在传送带的框架上,所述推块固定安装在菱形伸缩梯驱动杆的端部,所述菱形伸缩梯与控制器通讯连接。
17.优选的,所述传送带的框架上固定安装有承接板,所述承接板伸入至管路盒的放入口处。
18.优选的,所述竖直移动机构包含无杆气缸和u形框,所述u形框固定安装在无杆气缸的活动台上,所述u形框与管路盒的开口处适配,所述无杆气缸与控制器通讯连接。
19.优选的,所述竖直移动机构包含伸缩梯和放置板,所述伸缩梯的底部与放置板固定连接,所述放置板位于管路盒的通口处,且放置板位于桌子的上方,所述伸缩梯与控制器通讯连接。
20.优选的,所述运动小车上安装有定位模块,且定位模块与控制器通讯连接。
21.优选的,所述运动小车上固定安装有托盘。
22.优选的,所述u形框上设有重力感应器,且重力感应器与控制器通讯连接。
23.本发明的上述技术方案具有如下有益的技术效果:
24.通过传送带对盘子进行传送,控制器控制菱形伸缩梯启动,带动推块移动,将盘子经过放入口至运动小车上,运动小车根据所需房间,对控制器控制器运动小车进行运行,并通过竖直移动机构移至桌子上方,机器视觉机械手对盘子进行抓取,移至桌子上,供食用,运动小车移至放入口处继续使用;在不同楼层时,运动小车至u形框处,启动无杆气缸,无杆气缸带动运动小车至另一个管路盒,以实现不同层的送菜;综上减少人员的使用和提高效率;在人们食用完成后,机器视觉机械手对菜盘进行收取,并移至运动小车上送回放入口处。
附图说明
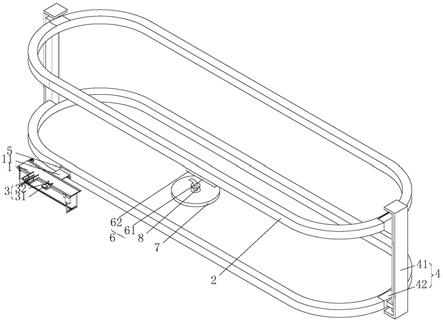
25.图1为本发明提出的一种传菜撤菜一体系统的结构示意图。
26.图2为本发明提出的一种传菜撤菜一体系统中u形框的结构示意图。
27.图3为本发明提出的一种传菜撤菜一体系统的系统图。
28.附图标记:1、传送带;2、管路盒;3、推动机构;31、菱形伸缩梯;32、推块;4、抬升转换机构;41、无杆气缸;42、u形框;5、运动小车;6、竖直移动机构;61、伸缩梯;62、放置板;7、桌子;8、机器视觉机械手;9、控制器;10、无线通讯模块;11、承接板;12、重力感应器。
具体实施方式
29.为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
30.如图1
‑
3所示,本发明提出的一种传菜撤菜一体系统,包括传送带1和管路盒2,传送带1上设有推动机构3;
31.管路盒2上开设有开口,管路盒2处设有抬升转换机构4;
32.管路盒2的一侧形成放入口,且管路盒2的内部放置有运动小车5;
33.管路盒2的底部设有若干个通口,且通口处设有竖直移动机构6;
34.管路盒2的下方设有桌子7,桌子7内设有机器视觉机械手8,桌子7上安装有控制面板,且控制面板与机器视觉机械手8通讯连接;
35.传送带1上设有控制器9,控制器9通过无线通讯模块10与运动小车5,控制器9与传送带1和推动机构3通讯连接。
36.在一个可选的实施例中,推动机构3包含菱形伸缩梯31和推块32组成,菱形伸缩梯31固定安装在传送带1的框架上,推块32固定安装在菱形伸缩梯31驱动杆的端部,菱形伸缩
梯31与控制器9通讯连接。
37.在一个可选的实施例中,传送带1的框架上固定安装有承接板11,承接板11伸入至管路盒2的放入口处。
38.在一个可选的实施例中,竖直移动机构6包含无杆气缸41和u形框42,u形框42固定安装在无杆气缸41的活动台上,u形框42与管路盒2的开口处适配,无杆气缸41与控制器9通讯连接。
39.在一个可选的实施例中,竖直移动机构6包含伸缩梯61和放置板62,伸缩梯61的底部与放置板62固定连接,放置板62位于管路盒2的通口处,且放置板62位于桌子7的上方,伸缩梯61与控制器9通讯连接。
40.在一个可选的实施例中,运动小车5上安装有定位模块,且定位模块与控制器9通讯连接。
41.在一个可选的实施例中,运动小车5上固定安装有托盘,托盘用于对菜盘进行盛放。
42.在一个可选的实施例中,u形框42上设有重力感应器12,且重力感应器12与控制器9通讯连接,重力感应器12对u形框42上是否有重物进行感应,以方便后续是否运动。
43.本发明中,通过传送带1对盘子进行传送,控制器9控制菱形伸缩梯31启动,带动推块32移动,将盘子经过放入口至运动小车5上,运动小车5根据所需房间,对控制器9控制器运动小车5进行运行,并通过竖直移动机构6移至桌子7上方,机器视觉机械手8对盘子进行抓取,移至桌子7上,供食用,运动小车移至放入口处继续使用;在不同楼层时,运动小车5至u形框42处,启动无杆气缸41,无杆气缸41带动运动小车至另一个管路盒2,以实现不同层的送菜;综上减少人员的使用和提高效率;在人们食用完成后,机器视觉机械手8对菜盘进行收取,并移至运动小车5上送回放入口处。
44.应当理解的是,本发明的上述具体实施方式仅仅用于示例性说明或解释本发明的原理,而不构成对本发明的限制。因此,在不偏离本发明的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。此外,本发明所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1