用于交通工具停放的无绳电梯机器人运输器的制作方法
1.本文所公开的主题一般涉及电梯系统领域,并且具体涉及用于将电梯轿厢从电梯井移动到停放区的方法和设备。
背景技术:
2.电梯轿厢常规地通过绳索和配重来操作,它们通常在单一时间仅允许电梯井中的一个电梯轿厢。无绳电梯系统可在单一时间允许电梯井中的多于一个电梯轿厢。
技术实现要素:
3.根据实施例,提供一种用于电梯轿厢的机器人运输器系统。所述机器人运输器系统包括:推进系统,所述推进系统配置成将电梯轿厢移动通过电梯井;以及机器人运输器,所述机器人运输器配置成在停放区内移动所述电梯轿厢,所述机器人运输器包括:电梯容纳槽,所述电梯容纳槽用于在所述电梯容纳槽与所述电梯井对齐时接纳所述电梯轿厢和所述电梯轿厢的所述推进系统。
4.除了本文所述特征中的一个或多个之外,或者作为备选,另外实施例可包括,所述机器人运输器进一步包括:推动系统和轮。
5.除了本文所述特征中的一个或多个之外,或者作为备选,另外实施例可包括,所述机器人运输器配置成沿x轴以及与所述x轴垂直的y轴移动。
6.除了本文所述特征中的一个或多个之外,或者作为备选,另外实施例可包括,第一导梁,所述第一导梁竖直地延伸通过所述电梯井,所述第一导梁包括第一表面以及与所述第一表面相对的第二表面,其中所述推进系统是爬梁器系统,所述爬梁器系统包括:第一轮,所述第一轮与所述第一表面相接触;以及第一电马达,所述第一电马达配置成旋转所述第一轮。
7.除了本文所述特征中的一个或多个之外,或者作为备选,另外实施例可包括,所述电梯容纳槽进一步包括:第一容纳槽导梁,所述第一容纳槽导梁配置成与所述第一导梁对齐。
8.除了本文所述特征中的一个或多个之外,或者作为备选,另外实施例可包括,第一导轨,所述第一导轨竖直地延伸通过所述电梯井,其中所述电梯容纳槽进一步包括:第一容纳槽导梁,所述第一容纳槽导梁配置成与所述第一导梁对齐。
9.除了本文所述特征中的一个或多个之外,或者作为备选,另外实施例可包括,第二导梁,所述第二导梁竖直地延伸通过所述电梯井,所述第二导梁包括所述第二导梁的第一表面以及与所述第二导梁的所述第一表面相对的所述第二导梁的第二表面,其中所述爬梁器系统进一步包括:第二轮,所述第二轮与所述第一导梁的所述第二表面相接触;第三轮,所述第三轮与所述第二导梁的所述第一表面相接触;以及第二电马达,所述第二电马达配置成旋转所述第三轮。
10.除了本文所述特征中的一个或多个之外,或者作为备选,另外实施例可包括,所述
电梯容纳槽进一步包括:第二容纳槽导梁,所述第二容纳槽导梁配置成与所述第二导梁对齐。
11.除了本文所述特征中的一个或多个之外,或者作为备选,另外实施例可包括,第二导梁,所述第二导梁竖直地延伸通过所述电梯井,所述第二导梁包括所述第二导梁的第一表面以及与所述第二导梁的所述第一表面相对的所述第二导梁的第二表面,其中所述爬梁器系统进一步包括:第二轮,所述第二轮与所述第一导梁的所述第二表面相接触;第三轮,所述第三轮与所述第二导梁的所述第一表面相接触;以及第二电马达,所述第二电马达配置成旋转所述第三轮。
12.除了本文所述特征中的一个或多个之外,或者作为备选,另外实施例可包括,所述电梯容纳槽进一步包括:第二容纳槽导梁,所述第二容纳槽导梁配置成与所述第二导梁对齐。
13.除了本文所述特征中的一个或多个之外,或者作为备选,另外实施例可包括,第二导轨,所述第二导轨竖直地延伸通过所述电梯井,其中所述电梯容纳槽进一步包括:第二容纳槽导梁,所述第二容纳槽导梁配置成与所述第二导梁对齐。
14.除了本文所述特征中的一个或多个之外,或者作为备选,另外实施例可包括,所述机器人运输器位于卡车上,所述卡车配置成将所述电梯轿厢从工厂运输到所述电梯井所位于的大楼或者从所述大楼运输到所述工厂。
15.根据另一实施例,一种将电梯轿厢从电梯井移动到所述电梯井外部的停放区的方法,所述方法包括:将机器人运输器移动到电梯井,以拾取所述电梯轿厢;将所述机器人运输器内的电梯轿厢容纳槽与所述电梯井对齐;使用推进系统将所述电梯轿厢从所述电梯井移动到所述电梯轿厢容纳槽中;以及将所述机器人运输器与所述电梯容纳槽内的所述电梯轿厢一起移动到所述停放区内的位置。
16.除了本文所述特征中的一个或多个之外,或者作为备选,另外实施例可包括,所述使用所述推进系统将所述电梯轿厢从所述电梯井移动到所述电梯轿厢容纳槽中进一步包括:使用爬梁器系统的第一电马达旋转第一轮,所述第一轮与第一导梁的第一表面相接触,所述第一导梁竖直地延伸通过所述电梯井。
17.除了本文所述特征中的一个或多个之外,或者作为备选,另外实施例可包括,将所述电梯轿厢容纳槽的第一容纳槽导梁与所述第一导梁对齐。
18.除了本文所述特征中的一个或多个之外,或者作为备选,另外实施例可包括,将所述电梯轿厢容纳槽的第一容纳槽导轨与第一导轨对齐,所述第一导轨竖直地延伸通过所述电梯井。
19.除了本文所述特征中的一个或多个之外,或者作为备选,另外实施例可包括,所述使用所述推进系统将所述电梯轿厢从所述电梯井移动到所述电梯轿厢容纳槽中进一步包括:旋转第二轮,所述第二轮与所述第一导梁的所述第二表面相接触,所述第一导梁竖直地延伸通过所述电梯井;以及使用所述爬梁器系统的第二电马达旋转第三轮,所述第三轮与第二导梁的第一表面相接触,所述第二导梁竖直地延伸通过所述电梯井。
20.除了本文所述特征中的一个或多个之外,或者作为备选,另外实施例可包括,将所述电梯轿厢容纳槽的第二容纳槽导梁与所述第二导梁对齐。
21.除了本文所述特征中的一个或多个之外,或者作为备选,另外实施例可包括,将所
述电梯轿厢容纳槽的第二容纳槽导轨与第二导轨对齐,所述第二导轨竖直地延伸通过所述电梯井。
22.根据另一实施例,一种在非暂时性计算机可读介质上体现的计算机程序产品,所述计算机程序产品包含指令,所述指令在由处理器执行时使所述处理器执行包括下列步骤的操作:将机器人运输器移动到电梯井,以拾取所述电梯轿厢;将所述机器人运输器内的电梯轿厢容纳槽与所述电梯井对齐;使用推进系统将所述电梯轿厢从所述电梯井移动到所述电梯轿厢容纳槽中;以及将所述机器人运输器与所述电梯容纳槽内的所述电梯轿厢一起移动到所述停放区内的位置。
23.本公开的实施例的技术效果包括使用机器人运输器将电梯轿厢从电梯井移动到电梯井外部的停放区。
24.上述特征和元素可按照各种组合而没有排它性地组合,除非另有明确说明。根据以下描述和附图,这些特征和元素以及其操作将变得更明白。但是应当理解,以下描述和附图本质上旨在是说明性和解释性而非限制性的。
附图说明
25.在附图中作为示例而非限制来说明本公开,在附图中,相似参考标号指示相似元件。
26.图1是按照本公开实施例的、具有爬梁器系统(beam climber system)的电梯系统的示意图;图2a示出按照本公开实施例的机器人运输器系统;图2b示出按照本公开实施例的机器人运输器系统;以及图3是按照本公开实施例的、将电梯轿厢从电梯井移动到停放区的方法的流程图。
具体实施方式
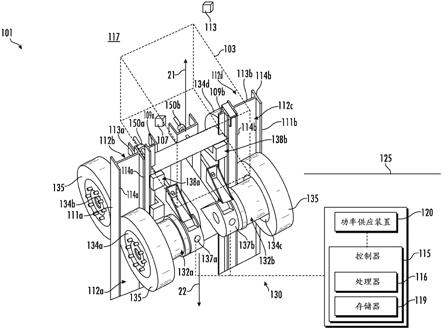
27.图1是电梯系统101的透视图,该电梯系统101包括电梯轿厢103、爬梁器系统130、控制器115和功率源120。虽然图1中示为独立于爬梁器系统130,但是本文所述的实施例可以可适用于爬梁器系统130中包含的控制器115(即,其随爬梁器系统130移动通过电梯井117),并且还可以可适用于离开爬梁器系统130所定位的控制器(即,其被远程连接到爬梁器系统130并且相对于爬梁器系统130是固定的)。虽然图1中示为独立于爬梁器系统130,但是本文所述的实施例可以可适用于爬梁器系统130中包含的功率源120(即,其随爬梁器系统130移动通过电梯井117),并且还可以可适用于离开爬梁器系统130所定位的功率源(即,其被远程连接到爬梁器系统130并且相对于爬梁器系统130是固定的)。
28.爬梁器系统130配置成在电梯井117内并且沿导轨109a、109b移动电梯轿厢103,所述导轨109a、109b竖直地延伸通过电梯井117。在实施例中,导轨109a、109b是t字梁。爬梁器系统130包括一个或多个电马达132a、132b。电马达132a、132b配置成通过旋转一个或多个轮134a、134b而在电梯井117内移动爬梁器系统130,所述一个或多个轮134a、134b被压靠在导梁111a、111b。在实施例中,导梁111a、111b是i字梁。要理解,虽然示出i字梁,但是任何梁或类似结构可与本文所述的实施例一起使用。由电马达132a、132b所驱动的轮134a、134b、134c、134d之间的摩擦允许轮134a、134b、134c、134d爬上21和爬下22导梁111a、111b。导梁
竖直地延伸通过电梯井117。要理解,虽然示出两个导梁111a、111b,但是本文所公开的实施例可与一个或多个导梁一起使用。还要理解,虽然示出两个电马达132a、132b,但是本文所公开的实施例可以可适用于具有一个或多个电马达的爬梁器系统130。例如,爬梁器系统130可具有用于四个轮134a、134b、134c、134d中的每个轮的一个电马达。电马达132a、132b可以是永磁体电马达、异步马达、或本领域技术人员已知的任何电马达。在本文未示出的其它实施例中,另一种配置可在两个不同的竖直位置(即,在电梯轿厢103的底部和顶部)具有被供能的轮。
29.第一导梁111a包括梁腹部分113a和两个凸缘部分114a。第一导梁111a的梁腹部分113a包括第一表面112a以及与第一表面112a相对的第二表面112b。第一轮134a与第一表面112a相接触,并且第二轮134b与第二表面112b相接触。第一轮134a可通过轮胎135而与第一表面112a相接触,并且第二轮134b可通过轮胎135而与第二表面112b相接触。第一轮134a通过第一压力机构150a而被压靠在第一导梁111a的第一表面112a,并且第二轮134b通过第一压力机构150a而被压靠在第一导梁111a的第二表面112b。第一压力机构150a将第一轮134a和第二轮134b压在一起以夹到第一导梁111a的梁腹部分113a上。第一压力机构150a可以是金属或弹性弹簧机构、气动机构、液压机构、螺丝扣机构、机电致动器机构、弹簧系统、液压缸、机动弹簧装置、或者任何其它已知的力致动方法。第一压力机构150a在电梯系统101的操作期间可以是实时可调整的,以控制第一轮134a和第二轮134b在第一导梁111a上的压力。第一轮134a和第二轮134b各自可包括轮胎135,其用于增加与第一导梁111a的附着摩擦力。
30.第一表面112a和第二表面112b竖直地延伸通过井117,因此创建用于第一轮134a和第二轮134b行驶的轨道。凸缘部分114a可充当护轨,以帮助沿这个轨道引导轮134a、134b,并且因此帮助防止轮134a、134b脱离轨道。
31.第一电马达132a配置成旋转第一轮134a以爬上21或爬下22第一导梁111a。第一电马达132a还可包括第一马达制动器137a,其用于减缓和停止第一电马达132a的旋转。第一马达制动器137a可被机械地连接到第一电马达132a。第一马达制动器137a可以是离合器系统、盘式制动器系统、鼓式制动器系统、第一电马达132a的转子上的制动器、电子制动装置、涡流制动器、磁流变液制动器(magnetorheological fluid brake)、或者任何其它已知制动系统。爬梁器系统130还可包括第一导轨制动器138a,该第一导轨制动器138a在操作上被连接到第一导轨109a。第一导轨制动器138a配置成通过夹到第一导轨109a上而减缓爬梁器系统130的移动。第一导轨制动器138a可以是对爬梁器系统130上的第一导轨109a起作用的卡钳制动器、或是对电梯轿厢103附近的第一导轨109起作用的卡钳制动器。
32.第二导梁111b包括梁腹部分113b和两个凸缘部分114b。第二导梁111b的梁腹部分113b包括第一表面112c以及与第一表面112c相对的第二表面112d。第三轮134c与第一表面112c相接触,并且第四轮134d与第二表面112d相接触。第三轮134c可通过轮胎135而与第一表面112c相接触,并且第四轮134d可通过轮胎135而与第二表面112d相接触。第三轮134c通过第二压力机构150b而被压靠在第二导梁111b的第一表面112c,并且第四轮134d通过第二压力机构150b而被压靠在第二导梁111b的第二表面112d。第二压力机构150b将第三轮134c和第四轮134d压在一起以夹到第二导梁111b的梁腹部分113b上。第二压力机构150b可以是弹簧机构、螺丝扣机构、致动器机构、弹簧系统、液压缸、和/或机动弹簧装置。第二压力机构
150b在电梯系统101的操作期间可以是实时可调整的,以控制第三轮134c和第四轮134d在第二导梁111b上的压力。第三轮134c和第四轮134d各自可包括轮胎135,其用于增加与第二导梁111b的附着摩擦力。
33.第一表面112c和第二表面112d竖直地延伸通过井117,因此创建用于第三轮134c和第四轮134d行驶的轨道。凸缘部分114b可充当护轨,以帮助沿这个轨道引导轮134c、134d,并且因此帮助防止轮134c、134d脱离轨道。
34.第二电马达132b配置成旋转第三轮134c以爬上21或爬下22第二导梁111b。第二电马达132b还可包括第二马达制动器137b,其用于减缓和停止第二马达132b的旋转。第二马达制动器137b可被机械地连接到第二马达132b。第二马达制动器137b可以是离合器系统、盘式制动器系统、鼓式制动器系统、第二电马达132b的转子上的制动器、电子制动装置、涡流制动器、磁流变液制动器、或者任何其它已知制动系统。爬梁器系统130包括第二导轨制动器138b,该第二导轨制动器138b在操作上被连接到第二导轨109b。第二导轨制动器138b配置成通过夹到第二导轨109b上而减缓爬梁器系统130的移动。第二导轨制动器138b可以是对爬梁器系统130上的第一导轨109a起作用的卡钳制动器、或是对电梯轿厢103附近的第一导轨109a起作用的卡钳制动器。
35.电梯系统101还可包括位置参考系统113。位置参考系统113可被安装在电梯井117的顶部处的固定部分上(诸如支承或导轨109上),并且可配置成提供与电梯井117内的电梯轿厢103的位置相关的位置信号。在其它实施例中,位置参考系统113可被直接安装到电梯系统的移动组件(例如电梯轿厢103或爬梁器系统130),或者可位于如本领域已知的其它位置和/或配置中。位置参考系统113能够是如本领域已知的、用于监测电梯井117内的电梯轿厢的位置的任何装置或机构。例如,非限制性地,如本领域的技术人员将会理解的,位置参考系统113能够是编码器、传感器、加速计、高度计、压力传感器、测距仪、或另一系统,并且能够包括速率感测、绝对位置感测等。
36.控制器115可以是电子控制器,其包括处理器116和关联存储器119,该关联存储器119包括计算机可执行指令,所述指令在由处理器116执行时使处理器116执行各种操作。处理器116可以是但不限于大量可能架构中任一项的单处理器或多处理器系统,包括同构或异构地布置的现场可编程门阵列(fpga)、中央处理单元(cpu)、专用集成电路(asic)、数字信号处理器(dsp)、或图形处理单元(gpu)硬件。存储器119可以是但不限于随机存取存储器(ram)、只读存储器(rom)、或者其它电子、光、磁、或任何其它计算机可读介质。
37.控制器115配置成控制电梯轿厢103和爬梁器系统130的操作。例如,控制器115可向爬梁器系统130提供驱动信号,以控制电梯轿厢103的加速、减速、调平、停止等。
38.控制器115还可配置成从位置参考系统113或者任何其它期望位置参考装置接收位置信号。
39.当在电梯井117内沿导轨109a、109b向上移动21或向下移动22时,电梯轿厢103可如由控制器115所控制的那样在一个或多个层站125停止。在一个实施例中,控制器115可被远程定位或者定位在云中。在另一个实施例中,控制器115可位于爬梁器系统130上。在实施例中,控制器115控制爬梁器系统的机载运动控制115(单独马达控制器上面的监督功能)。
40.电梯系统101的功率供应装置120可以是任何功率源,包括与其它组件相结合而被供应给爬梁器系统130的功率电网和/或电池功率。在一个实施例中,功率源120可位于爬梁
器系统130上。在实施例中,功率供应装置120是电池,其被包含在爬梁器系统130中。
41.电梯系统101还可包括加速计107,该加速计107附连到电梯轿厢103或爬梁器系统130。加速计107配置成检测电梯轿厢103和爬梁器系统130的加速度和/或速度。
42.要理解,虽然为了示例性论述而在本文中示出爬梁器系统130,但是本文所公开的实施例可以可适用于其它自推动电梯系统,诸如例如永磁体线性马达推进系统。
43.继续参照图1,现在参照图2a和图2b,示出按照本公开实施例的机器人运输器系统200。图2a是电梯系统101和机器人运输器系统200的侧视图,并且图2b是机器人运输器系统200的停放区210的顶视图。机器人运输器系统200包括一个或多个机器人运输器202。机器人运输器202可以是机动和自动推车,诸如例如自动机器人交通工具(arv)。机器人运输器202可沿停放区210的地面212移动。机器人运输器202可包括推动装置(为了简洁起见未示出),以便沿地面212移动。推动装置可以是电马达和关联轮214。备选地,机器人运输器202可悬浮而不是具有轮。在实施例中,机器人运输器202定位在电梯系统101下方,如图2a和图2b中所示。备选地,机器人运输器202可定位在电梯系统101上方。机器人运输器202包括一个或多个电梯轿厢容纳槽220,所述电梯轿厢容纳槽220配置成接纳和保持/固定电梯轿厢103和爬梁器系统130。电梯轿厢容纳槽220可包括约束或锁定机构(为了简洁起见未示出),其用于确保电梯轿厢103和爬梁器系统130在由机器人运输器202进行的运输期间没有移动。
44.机器人运输器202配置成将电梯轿厢103从电梯井117下方(或上方)移动到停放区210中的任何位置。机器人运输器202可配置成沿x轴272以及与x轴272垂直的y轴274移动。机器人运输器202的轮214可以是全向轮,所述全向轮允许沿x轴272和y轴274两者中的移动。要理解,机器人运输器202不限于全向轮,并且本文所公开的实施例可适用于具有不同推进设备或结构的机器人运输器。
45.机器人运输器202配置成将电梯轿厢容纳槽220与电梯井117对齐,以接纳电梯轿厢103和爬梁器系统130。例如,机器人运输器202可将第一电梯轿厢容纳槽220a与第一电梯井117a对齐,以接纳电梯轿厢103和爬梁器系统130。电梯轿厢容纳槽220可包括第一容纳槽导梁111a-1和第二容纳槽导梁111b-1。
46.第一容纳槽导梁111a-1配置成与第一导梁111a对齐,使得当爬梁器系统130正离开电梯井117并进入电梯轿厢容纳槽220以搭乘机器人运输器202时,轮134a、134b(参见图1)可从第一导梁111a滚动到第一容纳槽导梁111a-1。机器人运输器202可包括第一传感器240a,该第一传感器240a配置成检测第一容纳槽导梁111a-1与第一导梁111a对齐的时间。要理解,机器人运输器202可包括其它传感器,包括但不限于微开关、间隙传感器、翼片式传感器(vane sensor)、荷重元(load sensor)、应变计、或断梁传感器。
47.第二槽容纳导梁111b-1配置成与第二导梁111b对齐,使得当爬梁器系统130正离开电梯井117并进入电梯轿厢容纳槽220以搭乘机器人运输器202时,轮134c、134d(参见图1)可从第二导梁111b滚动到第二槽容纳导梁111b-1。机器人运输器202可包括第二传感器240b,该第二传感器240b配置成检测第二容纳槽导梁111b-1与第二导梁111b对齐的时间。
48.第一容纳槽导轨109a-1配置成与第一导轨109a对齐。第一传感器240a可配置成检测第一容纳槽导轨109a-1与第一导轨109a对齐的时间。
49.第二槽容纳导轨109b-1配置成与第二导轨109b对齐。机器人运输器202可包括第
二传感器240b,该第二传感器240b配置成检测第二容纳槽导轨109b-1与第二导轨109b对齐的时间。
50.要理解,虽然图2a将机器人运输器202示为包括两个传感器240a、240b,但是机器人运输器系统200可包括任何数量的传感器(即,一个或多个传感器),所述任何数量的传感器用于确保第一容纳槽导梁111a-1与第一导梁111a的对齐、第二槽容纳导梁111b-1与第二导梁111b的对齐、第一容纳槽导轨109a-1与第一导轨109a的对齐、以及第二槽容纳导轨109b-1与第二导轨109b的对齐。
51.传感器240a、240b配置成向爬梁器系统130的控制器115(参见图1)传递对齐,使得爬梁器系统130可将其本身和电梯轿厢103移动到机器人运输器202的电梯轿厢容纳槽220中。传感器240a、240b还配置成向爬梁器系统130的控制器115(参见图1)传递未对齐,以防止爬梁器系统130尝试将其本身和电梯轿厢103移动到不是未对齐的机器人运输器202的电梯轿厢容纳槽220中。
52.传感器240a、240b配置成向机器人运输器202的机器人运输器控制器215传递对齐或者未对齐。机器人运输器控制器215配置成控制机器人运输器202的操作。通过向机器人运输器控制器215报告未对齐,机器人运输器控制器215然后可采取动作以实现对齐,诸如向前或向后移动。通过向机器人运输器控制器215报告对齐,机器人运输器控制器215可以不再需要移动机器人运输器202,直到电梯轿厢103和爬梁器系统130从电梯井移动到机器人运输器202的电梯轿厢容纳槽220中。
53.机器人运输器控制器215可以是电子控制器,其包括处理器216和关联存储器219,该关联存储器219包括计算机可执行指令,所述指令在由处理器216执行时使处理器216执行各种操作。处理器216可以是但不限于大量可能架构中任一项的单处理器或多处理器系统,包括同构或异构地布置的现场可编程门阵列(fpga)、中央处理单元(cpu)、专用集成电路(asic)、数字信号处理器(dsp)、或图形处理单元(gpu)硬件。存储器219可以是但不限于随机存取存储器(ram)、只读存储器(rom)、或者其它电子、光、磁、或任何其它计算机可读介质。
54.机器人运输器系统200还包括停放监督控制器315。停放监督控制器315可与每个机器人运输器202的机器人运输器控制器215进行通信。停放监督控制器315配置成使用附连到机器人运输器202的位置传感器320来检测每个机器人运输器202的位置。停放监督控制器315配置成协调停放区210内的机器人运输器202中的每个的移动。
55.停放监督控制器315可以是电子控制器,其包括处理器316和关联存储器319,该关联存储器319包括计算机可执行指令,所述指令在由处理器316执行时使处理器316执行各种操作。处理器316可以是但不限于大量可能架构中任一项的单处理器或多处理器系统,包括同构或异构地布置的现场可编程门阵列(fpga)、中央处理单元(cpu)、专用集成电路(asic)、数字信号处理器(dsp)、或图形处理单元(gpu)硬件。存储器319可以是但不限于随机存取存储器(ram)、只读存储器(rom)、或者其它电子、光、磁、或任何其它计算机可读介质。
56.虽然图2a中示为独立于机器人运输器202,但是本文所述的实施例可以可适用于位于机器人运输器202中(即,随机器人运输器202移动)或者位于云计算网络中的机器人运输器控制器215。
57.继续参照先前附图,现在参照图3,示出按照本公开实施例的、将电梯轿厢103从电梯井117移动到电梯井117外部的停放区210的方法400的流程图。
58.在框404,机器人运输器202被移动到电梯井117,以拾取电梯轿厢103。在框406,机器人运输器202内的电梯轿厢容纳槽220与电梯井117对齐。
59.在框408,推进系统将电梯轿厢103从电梯井117移动到电梯轿厢容纳槽220中。在实施例中,推进系统是爬梁器系统130,并且电梯轿厢103可通过使用爬梁器系统130的第一电马达132旋转第一轮134a来移动。第一轮134a与第一导梁111a的第一表面112a相接触,该第一导梁111a竖直地延伸通过电梯井117。
60.在框410,机器人运输器202与电梯容纳槽220内的电梯轿厢103一起被移动到停放区210内的位置。该位置可由停放监督控制器315来确定。停放监督控制器315可周期性地或偶发地重新组织停放区210,因此要求机器人运输器202在停放区210内来回移动。
61.方法400还可包括将电梯轿厢容纳槽220的第一容纳槽导梁111a-1与第一导梁111a对齐。方法400可进一步包括将电梯轿厢容纳槽220的第一容纳槽导轨109a-1与第一导轨109a对齐,该第一导轨109a竖直地延伸通过电梯井117。
62.还可通过使用爬梁器系统130的第二电马达132b旋转第三轮134c来移动电梯轿厢103,第三轮与第二导梁111b的第一表面112c相接触,该第二导梁111b竖直地延伸通过电梯井117。
63.方法400还可包括将电梯轿厢容纳槽220的第二容纳槽导梁111b-1与第二导梁111b对齐。方法400可进一步包括将电梯轿厢容纳槽220的第二容纳槽导轨109b-1与第二导轨109b对齐,该第二导轨109b竖直地延伸通过电梯井117。
64.另外,机器人运输器系统200能够用来在繁忙时间(busy time)期间引入附加电梯轿厢103,在不繁忙时间(slow time)期间移除电梯轿厢103,移除电梯轿厢103以供维修,引入已现代化的电梯轿厢103并移除较旧的电梯轿厢。在一个实施例中,机器人运输器202位于卡车上,该卡车配置成将电梯轿厢103从工厂运输到电梯井117所位于的大楼或者从大楼运输到工厂。
65.虽然以上描述已按照特定顺序描述了图3的流程过程,但是应当理解,除非所附权利要求中另有具体要求,否则可改变步骤的排序。
66.本发明可以是在集成的任何可能技术细节级别的系统、方法、和/或计算机程序产品。计算机程序产品可包括(一个或多个)计算机可读存储介质,在所述(一个或多个)计算机可读存储介质上具有用于使处理器执行本发明的方面的计算机可读程序指令。
67.如上所述,实施例能够采取处理器实现的过程以及用于实践那些过程的装置(诸如处理器)的形式。实施例还能够采取计算机程序代码(例如计算机程序产品)的形式,所述计算机程序代码包含在诸如软盘、cd rom、硬盘驱动器、或者任何其它非暂时性计算机可读介质之类的有形介质(例如非暂时性计算机可读介质)中体现的指令,其中当计算机程序代码被加载到计算机中并由计算机执行时,计算机成为用于实践所述实施例的装置。实施例还能够采取计算机程序代码的形式,例如,无论是存储在存储介质中、加载到计算机中和/或由计算机执行、或者通过某种传输介质所传送、加载到计算机中和/或由计算机执行、或者通过某种传输介质(诸如通过电气布线或敷设线缆、通过光纤、或者经由电磁辐射)所传送,其中当计算机程序代码被加载到计算机中并由计算机执行时,计算机成为用于实践示
例性实施例的装置。在通用微处理器上实现时,计算机程序代码段将微处理器配置成创建特定逻辑电路。
68.术语“大约”旨在包括与基于提交本技术时可用的设备的特定量和/或制造容差的测量相关联的误差程度。
69.本文所使用的术语学只是为了描述特定实施例的目的,并非旨在是对本公开的限制。如本文中所使用的,单数形式“一(a、an)”和“该”旨在也包括复数形式,除非上下文另有明确指示。还将理解,在本说明书中使用时,术语“包括(comprise和/或comprising)”指定所陈述的特征、整数、步骤、操作、元件、和/或组件的存在,但不排除一个或多个其它特征、整数、步骤、操作、元件组件、和/或其群组的存在或添加。
70.本领域技术人员将理解,在本文中示出和描述各种示例实施例,其各自具有特定实施例中的某些特征,但是本公开并不因此而受限。相反,本公开能够被修改成结合此前没有描述但与本公开的范围一致的任何数量的变化、变更、置换、组合、子组合、或等效布置。另外,虽然已描述了本公开的各种实施例,但要理解,本公开的方面可以仅包含所述实施例中的一些。因此,本公开不要被视为受前面描述所限制,而是仅受所附权利要求的范围所限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1