一种立柱桩料仓自动取放料装置的制作方法
1.本发明涉及自动化装备,具体是一种立柱桩料仓自动取放料装置。
背景技术:
2.传统齿轮或精密法兰加工过程中,齿轮齿面等严禁碰撞,如图1所示的立柱桩料仓成为一种高效稳定的工件储存转运方式,立柱直径配合齿轮或法兰内孔,立柱间距以相邻工件间不发生碰撞且方便人工取放为宜,单根立柱高度一般在400mm以上,根据工件厚度不同,上下可堆垛不同数量的工件。随着自动化的推进,因传统气动夹爪无法安装过长的夹指,必然无法取放到立柱下部的工件。
技术实现要素:
3.为解决上述技术难题,本发明提供一种立柱桩料仓自动取放料装置,所采取的技术方案是:一种立柱桩料仓自动取放料装置,包括工装底板,所述工装底板上敷设两条长向竖直的直线导轨,两条所述直线导轨之间安装行程竖直的无杆气缸,每个所述直线导轨滑动配合一个以上的第一滑块,所述第一滑块支撑和固定夹爪底板,所述无杆气缸的缸体与所述夹爪底板固接;所述夹爪底板的上端固设行程竖直的夹紧气缸,所述夹紧气缸下方的所述夹爪底板上敷设长向竖直的短直线导轨,所述短直线导轨滑动配合第二滑块,所述第二滑块的上端与所述夹紧气缸的缸杆连接,所述第二滑块的下端两侧分别铰接第一连杆的上端,所述第一连杆的下端铰接第二连杆的上端,所述第二连杆的下端铰接夹指,所述第二连杆还与所述夹爪底板的下端处铰接;所述第二连杆内侧还设置第三连杆,所述第三连杆的上端与所述夹爪底板的下端处铰接、下端与所述夹指铰接。
4.进一步地,所述第三连杆之间的所述夹爪底板上固设长向竖直的滑座,所述滑座滑动配合滑杆,所述滑座上方的所述夹爪底板上固设固定座,所述固定座上滑动配合具有帽头的顶杆,所述顶杆上套设弹簧,所述弹簧的一端抵在所述顶杆的帽头上,另一端抵在所述固定座上,所述顶杆的帽头下端抵在所述滑杆的上端,所述固定座上安装接近开关。
5.进一步地,所述夹指呈l形镜像对称,包括竖板和平板,所述平板内侧开设与工件外廓形状相应的钳口。
6.进一步地,无论何时,所述第一连杆与所述第二连杆的内侧夹角小于180
°
。
7.进一步地,所述第三连杆上、下铰接点之间的距离等于第二连杆中、下铰接点之间的距离;所述第三连杆上铰接点与第二连杆中铰接点之间的距离等于所述第二连杆中铰接点与所述第三连杆下铰接点之间的距离。
8.进一步地,所述第三连杆上铰接点与第二连杆中铰接点之间的距离、所述第二连杆中铰接点与所述第三连杆下铰接点之间的距离略大于所述第三连杆与所述第二连杆宽度之和。
9.进一步地,所述滑杆上端固设限位螺钉。
10.与现有技术相比,本发明利用平行四边形连杆机构能够在很小的范围内实现工件的抓取,可以做的很长,方便取放到立柱桩料仓下部的工件。
附图说明
11.图1是立柱桩料仓的结构示意图。
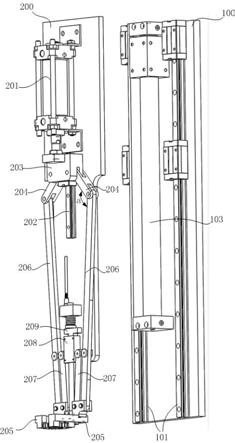
12.图2是本发明的结构示意图。
13.图3是本发明下部部分部件的结构示意图。
具体实施方式
14.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
15.在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上,除非另有明确的限定。
16.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
17.以下结合附图对本发明作进一步详细说明。
18.如图所示一种立柱桩料仓自动取放料装置,包括工装底板100,所述工装底板100上敷设两条长向竖直的直线导轨101,两条所述直线导轨101之间安装行程竖直的无杆气缸103,每个所述直线导轨101滑动配合2个第一滑块102,4个所述第一滑块102支撑和固定夹爪底板200,所述无杆气缸103的缸体与所述夹爪底板200固接;所述夹爪底板200的上端固设行程竖直的夹紧气缸201,所述夹紧气缸201下方的所述夹爪底板200上敷设长向竖直的短直线导轨202,所述短直线导轨202滑动配合第二滑块203,所述第二滑块203的上端与所述夹紧气缸201的缸杆连接,所述第二滑块203的下端两侧分别铰接第一连杆204的上端,所述第一连杆204的下端铰接第二连杆206的上端,所述第二连杆206的下端铰接夹指205,所述第二连杆206还与所述夹爪底板200的下端处铰接;所述第二连杆206内侧还设置第三连杆207,所述第三连杆207的上端与所述夹爪底板200的下端处铰接、下端与所述夹指205铰接。
19.所述第三连杆207之间的所述夹爪底板200上固设长向竖直的滑座208,所述滑座208滑动配合滑杆209,所述滑座208上方的所述夹爪底板200上固设固定座210,所述固定座210上滑动配合具有帽头的顶杆211,所述顶杆211上套设弹簧213,所述弹簧213的一端抵在所述顶杆211的帽头上,另一端抵在所述固定座210上,所述顶杆211的帽头下端抵在所述滑杆209的上端,所述固定座210上安装接近开关212。这样只有在滑杆下端顶到工件上移时,接近开关才能发出信号,控制夹紧气缸201动作,抓取或放下工件。
20.所述夹指205呈l形镜像对称,包括竖板2051和平板2052,所述平板2052内侧开设与工件300外廓形状相应的钳口2053。
21.无论何时,所述第一连杆204与所述第二连杆206的内侧夹角a小于180
°
。避免连杆产生死点。
22.所述第三连杆207上、下铰接点之间的距离等于第二连杆206中、下铰接点之间的距离;所述第三连杆207上铰接点与第二连杆206中铰接点之间的距离等于所述第二连杆206中铰接点与所述第三连杆207下铰接点之间的距离。这样便形成平行四边形连杆机构,既能保证力矩长距离稳定传递﹐又能保证横向位移极短。。
23.所述滑杆209上端固设限位螺钉214。可以方便调整调整夹爪下降高度, 有些个直径相似但是厚度不同的工件,就可以不更换钳口2053,而只需调整限位螺钉就可以了,要不有可能一次抓取两个件。
24.所述第三连杆207上铰接点与第二连杆206中铰接点之间的距离、所述第二连杆206中铰接点与所述第三连杆207下铰接点之间的距离略大于所述第三连杆207与所述第二连杆206宽度之和。这样能够适应相邻工件间较小的间隙。
25.本发明整体分为两大部分,一部分为夹爪总成,用来对工件进行夹持取放;一部分为升降总成,两部分之间依靠直线导轨连接,夹爪总成可在升降总成上的直线导轨上滑动,滑动的动力为升降总成上的无杆气缸。
26.夹爪总成:夹紧气缸通过滑块及连杆驱动平行四边形机构,通过连接于平行四边形机构上的夹指完成工件的夹持。
27.深度限位:因工件深度存在误差,设置深度限位装置;无杆气缸驱动夹爪总成取件时,夹爪总成持续下降,指导滑杆接触工件上平面并压缩弹簧至限位螺钉为止,同时接近开关感应到感应螺钉,证明夹爪总成下降到位,即可进行工件夹持。
28.作业流程:机器人依靠相机拍摄定位等方式寻找立柱位置,机器人携带工装运动到取料位置后,无杆气缸驱动夹爪总成下降取料,直至深度限位上的滑杆接触工件并压缩弹簧至限位螺钉,接近开关感应到后,开始进行夹持动作,夹持完成后,无杆气缸驱动夹爪总成上升,完成取件作业。
29.以上所述,仅是本发明的较佳实施例而已,并非对本发明做任何形式的限制;任何熟悉本领域的技术人员,在不脱离本发明技术方案范围的情况下,都可利用上述揭示的方法和技术内容对本发明的技术方案做出许多可能的变动或修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所做的任何简单修改、等同替换、等效变化及修饰,均仍属于本发明技术方案保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1