一种风电塔筒免爬器行进安全检测方法与流程
1.本发明涉及风电技术领域,具体为一种风电塔筒免爬器行进安全检测方法。
背景技术:
2.风电塔筒就是风力发电的塔杆,在风力发电机组中主要起支撑作用,同时吸收机组震动;免爬器是以风电塔筒内的铝合金直梯为支撑和导轨进行升降的设备,类似于载人升降机,主要用于风电机组检修,只能一人上下;免爬器采用钢丝绳摩擦模式,过孔和层时会自动减速,有手动和遥控模式。
3.在对载人提升装置进行检验的过程中,检验人员本身应具有自我保护意识,对于载人提升装置的危险源要有充分的认识和适时的预判;主要的危险源来自以下几个方面:高处坠落、机械伤害、电气伤害以及其他危险源,同时,现有技术中的环境监测装置防尘效果差,容易导致监测误差,影响免爬器的正常工作,在升降的过程中,采用齿轮齿条式起升,升降速率较低;而且,升降过程中,采光较差,从而影响操作人员的升降操作,因此,设计一种风电塔筒免爬器行进安全检测方法是很有必要的。
技术实现要素:
4.本发明的目的在于克服现有技术中存在的上述不足,而提供一种风电塔筒免爬器行进安全检测方法,通过对免爬器的各个组成部位以及作业环境进行检测,从而有效排除设备在工作时产生故障的情况;使得免爬器在工作时能够具有稳定的运行状态,使得使用人员的使用安全性得到有效提高;同时,通过在作业环境设置环境监测装置,有效提高环境因素监测的准确性,为免爬器的正常运行提供了稳定的保障。
5.本发明解决上述问题所采用的技术方案是:一种风电塔筒免爬器行进安全检测方法,其特征在于,包括如下步骤;步骤s1:现场环境设施检测,现场环境应满足载人提升装置的作业环境要求和仪器设备的使用环境要求,通过环境监测设备对现场环境进行监测;仪器设备的使用环境要求参照仪器设备操作规程及说明书,当发现设施和环境条件危及到检验结果或人身设备的安全时,应立即停止检验,待处理至符合使用要求;所述环境监测设备包括防水底板、防护侧板、电动气缸、防护顶板、升降支座、监测组件、环保组件和承重支座,所述防水底板的顶部端面边缘位置处固定安装有防护侧板,所述防水底板的顶部端面两侧均通过螺钉固定安装有电动气缸,且电动气缸的顶部一端通过活塞杆连接安装有升降支座,所述升降支座的顶部一端固定安装有防护顶板,所述防护顶板的顶部端面设置有环保组件,所述防水底板的顶部端面中央固定安装有监测组件,所述防水底板的底部端面四周均固定安装有承重支座;步骤s2:设备外观检测;审查使用单位以下资料是否齐全,是否存档保管:a、整机产品质量合格证明;b、零部件产品质量合格证明;
c、产品型式试验证明;d、安装自检报告;并检查使用单位本定检周期内自行检查报告及使用记录是否齐全,是否存档保管;免爬器应设铭牌,标明制造厂家、额定载重量和人数、重要技术参数标识,并张贴于明显部位;免爬器下部空间应有安全色标记,禁止免爬器正常运行时有人员进入;免爬器的承载支架应无明显可见的裂纹、变形、锈蚀;爬梯梯粱、踏棍应无明显变形、缺件、损坏等缺陷;爬梯与塔筒连接无明显松动、缺件、损坏等缺陷;步骤s3:主要零部件检测,包括驱动装置、钢丝绳、车体、导轨及其附属装置的检测;1)驱动装置检测:驱动装置固定有效、固定螺栓无松动、缺失、锈蚀;驱动装置工作时无异响;驱动电机空载电流应符合规定限值,驱动电机散热风扇应有效,减速器无渗漏油;制动器应为常闭式,制动平稳可靠,制动器间隙应符合规定限值,制动器摩擦盘厚度应符合规定限值;驱动轮与钢丝绳配合顺畅,驱动轮运行时应无打滑现象,驱动轮与钢丝绳直径之比不应小于20倍,导向轮卷绕直径与钢丝绳直径之比不应小于16倍,驱动轮和导向轮防脱槽装置工作有效;2)钢丝绳检测:新更换的钢丝绳应有合格证明,工作钢丝绳及安全钢丝绳公称直径不应小于6mm;工作钢丝绳与安全钢丝绳的悬挂应相互独立,钢丝绳应设张紧装置,且固定可靠,并处于张紧状态,钢丝绳末端连接、固定应牢固可靠,钢丝绳与电缆、平台等应无干涉现象;3)车体检测:车体各部件无松动、变形、损坏现象,车体操作手柄、急停按钮、转换开关正常,车体导向轮无异常磨损,沿导轨运行时无卡滞现象,车体与导轨之间永久性防脱装置有效,车体操作人员安全防护装置有效;4)导轨及其附属装置检测:每根导轨至少应有2个压板固定在爬梯支架上,导轨之间应采用接导板连结,导轨接头不错位,导轨与爬梯支架连结压板螺栓无松动、锈蚀或缺失,导轨无异常磨损、断裂;上、下限位板安装牢固,上、下缓冲装置固定牢固,无损坏,平台减速装置安装正确、牢固,顶轮组件固定牢固、无损换,固定压板及螺栓无锈蚀;步骤s4:安全保护和防护装置的检测,包括防坠保护装置、超载保护装置、限位保护装置、极限位保护装置、轮廓限位装置、紧急停止开关、减速报警装置、手动滑降装置、缓冲器和保护罩的检测;1)防坠保护装置检测:车体应设置独立于工作绳系统的防坠保护装置,使用人员应设置独立于车体防坠保护的防坠保护装置,防坠保护装置应工作可靠,锁定后无滑移现象,锁定状态下应不能自动复位,应在标定的有效期限内使用,标定的有效期限不应大于1年,防坠装置采用防坠落滑块模式时,防坠落滑块应当具有防装反设计;2)超载保护装置检测:超载保护装置在车体超载时应发出声光报警,并阻止免爬器启动或提升,直至超载状况解除;3)限位保护装置检测:免爬器应设置上、下极限装置,上、下极限装置动作应准确、可靠;4)极限位保护装置检测:免爬器应设置上、下行程限位装置,上、下行程限位装置
动作应准确、可靠;5)轮廓限位装置检测:对设置有轮廓限位装置的,当平台盖板未打开或运行遇到障碍时,车体立即停止运行;轿厢底部和顶部均应设置轮廓限位装置,轿厢底部应为无死点下轮廓限位,轿厢运行过程中,当升降机运行区域内有障碍物触碰轮廓限位时,使轿厢停止运行;6)紧急停止开关检测:免爬器车体面板、遥控器、电控箱上应设置红色急停开关,有明显的停止标记,按压后不能自动复位;7)减速报警装置检测:车体通过塔筒法兰、平台盖板时,应有自动减速及通过后自动恢复正常运行速度并配合声光报警的功能;8)手动滑降装置检测:免爬器应设置断电时可使车体平稳下降的手动滑降装置,动作可靠;9)缓冲器检测:免爬器应在车体运行的上下极限位置设置刚性限位缓冲装置;10)防护罩检测:免爬器外露转动部分应设置防护罩;步骤s5:控制系统的检测;包括控制方式、控制装置和遥控器的检测;1)控制方式检测:免爬器应设置车体、电控箱和手持遥控三种控制方式,且车体具有优先控制权,互锁功能应有效,控制方式为点动控制,电控箱控制应有自动控制及强制回车功能;2)控制装置检测:控制装置应符合以下要求:a、应车体面板、遥控器、电控箱上应设置上升、下降开关;b、控制盒、遥控装置的控制电源应为安全电压,电压不应大于36v;c、车体应当设置为双手手指按压式操控,只有双手手指同时按压操控按钮时车体才能运行;d、按钮盘按钮应动作可靠,标识清晰、准确;3)遥控器检测:遥控器应工作正常,电池电量充足,遥控器电池有电压信号显示和电压低报警功能,在控制箱上可直接充电,遥控器的无线信号为专用无线信号;步骤s6:电气系统的检测;包括接地、电气绝缘、总电源接触器、短路保护和漏电保护的检测;1)接地检测:供电用电源,零线n与保护线pe应当始终分开,电气系统设备外壳应根据配电网情况可靠接地,保护接零或保护接地,tt系统应设置漏电保护装置,接地电阻不大于4ω,所有电气设备及线管、线槽的外露可导电部分应当与保护线pe可靠连接,电气系统为安全电压的除外;2)电气绝缘检测:动力电路、照明电路和电气安全装置电路的绝缘电阻应当不小于2mω;3)总电源接触器检测:供电电源应设总电源接触器,总电源接触器应能可靠地切断免爬器的动力电源;4)短路保护检测:应至少设置一级短路保护,自动断路器或者熔断器;5)漏电保护检测:应设漏电保护装置,其剩余动作电流、动作时间应符合相关要求;步骤s7:噪声的检测;额定载重量下运行时,应无异常震动和声响,正常操作及运
行时通过噪音值不应大于79db;步骤s8:运行试验的检测;车体以正常运行速度上下运行,操纵机构、控制系统、安全防护装置和制动器动作可靠、准确,与其他结构无干涉;各机构动作平稳、运行正常、无异常声响,能实现规定的功能;步骤s9:新安装首次定期检验附加的检测;包括:静载荷试验、动载荷试验、制动性能试验、坠落试验和性能试验的检测;1)静载荷试验检测:车体均布125%额定载重量,检查是否符合以下要求:a、主要受力构件无明显裂纹、永久变形、油漆剥落;主要构件连接处未出现连接松动或者损坏;b、无影响性能和安全的其它损坏;c、防坠装置作用状态下,静置10min,下滑量≤10mm;2)动载荷试验检测:车体均布110%额定载重量,检查是否符合以下要求:a、各机构、零部件等工作正常;b、各机构、结构件无损坏,连接处无松动;3)制动性能试验检测:车体均布150%额定载重量时,制动器作用15min,滑移距离不得大于10mm,车体装载125%额定载重量时,制动距离不大于100mm;4)坠落试验检测:按照相应要求进行车体坠落试验,按新安装免爬器不少于5%比例抽查,且至少不能少于1台,检查是否符合以下要求:a、防坠保护装置应符合工作可靠,锁定后无滑移现象;b、锁定状态下应不能自动复位;c、防坠保护装置锁止距离≤200mm。
6.进一步的,所述步骤s1中,现场环境条件基本要求:提升装置的电源为三相交流380v或交流220v,频率为50hz/60hz,供电系统在载人提升装置馈电线接入处的电压波动不应超过额定电压的
±
5%;载人提升装置检验的气候条件:环境温度:
‑
40℃至+50℃,24小时内的平均温度不超过+35℃;在+25℃的温度下相对湿度不超过95%。
7.进一步的,所述步骤s2中,钢丝绳出现以下情况之一时,钢丝绳应报废:a、出现笼状畸变、绳芯挤出、扭结、部分压扁、弯折、断股等;b、钢丝绳直径30倍范围内出现断丝超过8处以上;c、钢丝绳磨损超过钢丝绳公称直径的7%。
8.进一步的,所述步骤s4中,限位保护装置检测的过程中,当设置上极限开关时,检查极限开关应符合以下要求:a、在行程最上端应设置一个极限开关,其应能在轿厢与其他部件发生接触前切断动力供电,使轿厢停止;b、极限开关与限位开关不应共用一个触发元件;c、极限开关应由轿厢或其相关部件的运动直接触发;d、极限开关触发后,提升机必须等到手动解除才能恢复运行。
9.进一步的,所述步骤s9中,性能试验包括运行试验和提升力试验;1)运行试验包括:使用助爬器上下全程运行,操纵机构、安全防护装置动作可靠、
准确,机构动作平稳、运行正常,能实现规定的功能,主要零部件无损坏、连接处无松动;2)进行提升力试验时,分别选择助力挡位,测试助爬器提升力在相应挡位
±
10%范围内。
10.进一步的,所述监测组件包括防尘机壳、第一温度监测仪、第二湿度监测仪、电动推杆、转动台、第一感应探头和第二感应探头,所述防尘机壳固定安装在防水底板的顶部端面中央,所述防尘机壳的内部两侧分别固定安装有第一温度监测仪和第二湿度监测仪,所述防尘机壳的顶部端面中央固定安装有电动推杆,且电动推杆的顶部一端连接安装有转动台,所述转动台的顶部端面两侧分别固定安装有第一感应探头和第二感应探头,所述第一感应探头与第一温度监测仪电性连接,所述第二感应探头与第二湿度监测仪电性连接。
11.进一步的,所述环保组件包括蓄电池、光伏发电机本体和光伏板,所述蓄电池固定安装在防水底板的顶部端面一侧,所述光伏发电机本体固定安装在防护顶板的底部端面一侧,且光伏发电机本体与蓄电池通过输电线连接,所述防护顶板的顶部端面固定安装有光伏板。
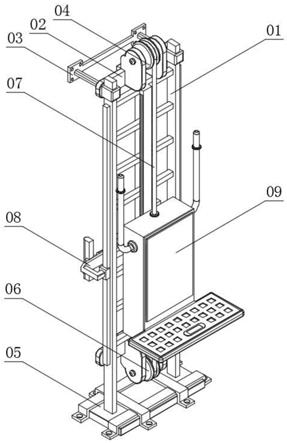
12.进一步的,所述免爬器包括塔筒爬梯、横梁架、焊接底架、传动顶轮、固定座、传动底轮、升降钢索、照明组件和免爬组件,所述塔筒爬梯的顶部和底部端面一侧分别通过螺栓固定安装有横梁架,所述塔筒爬梯顶部横梁架的外侧通过螺栓固定安装有焊接底架,所述塔筒爬梯的底部一端固定安装有固定座,所述横梁架的一侧均固定安装有传动端盖,所述塔筒爬梯顶部一侧的传动端盖之间安装有传动顶轮,所述塔筒爬梯底部一侧的传动端盖之间安装有传动底轮,所述传动底轮与传动顶轮之间连接安装有升降钢索,所述升降钢索的外侧设置有免爬组件,且免爬组件位于塔筒爬梯的外侧,所述塔筒爬梯的端面另一侧安装有照明组件。
13.进一步的,所述免爬组件包括驱动壳、免爬器本体、称重踏板、电机座、驱动电机、驱动轮、第一张紧轮和第二张紧轮,所述驱动壳设置在升降钢索的一侧,所述驱动壳的外部固定安装有免爬器本体,所述免爬器本体的一端固定安装有称重踏板,且称重踏板的端面安装有体重秤,所述驱动壳的内部一端固定安装有电机座,所述电机座的一端固定安装有驱动电机,所述驱动电机的一端通过驱动轴连接安装有驱动轮,所述驱动轮的顶部和底部分别通过转动轴连接安装有第一张紧轮和第二张紧轮,所述升降钢索穿过第一张紧轮、驱动轮和第二张紧轮。
14.进一步的,所述照明组件包括电动导轨、导向滑块、连动杆、第一灯座、第一照明灯、第二灯座和第二照明灯,两个所述电动导轨分别固定安装在塔筒爬梯的两侧中央,所述电动导轨的外部设置有导向滑块,所述导向滑块的一端固定安装有连动杆,且两个连动杆的一端固定安装有第一灯座,所述第一灯座的两侧端面均固定安装有第一照明灯,所述第一灯座的一端两侧均固定安装有第二灯座,且第二灯座的端面中央固定安装有第二照明灯。
15.本发明与现有技术相比,具有以下优点和效果:本发明通过对免爬器的各个组成部位以及作业环境进行检测,从而有效排除设备在工作时会产生故障的情况;使得免爬器在工作时能够具有稳定的运行状态,使得使用人员的使用安全性得到有效提高;同时,通过在作业环境设置环境监测装置,防尘效果好,有效提高了环境因素监测的准确性,为免爬器的正常运行提供了稳定的保障;免爬器在升降的过程中,通过使用钢索摩擦从而达到升降
的效果,省时省力,能够有效提高升降的速率;同时,在升降的过程中,能够具有良好的照明效果,有利于操作人员进行观察,提高升降作业时的安全性。
附图说明
16.图1为本发明环境监测装置的整体结构示意图;图2为本发明环境监测装置的整体剖视图;图3为本发明环境监测装置的局部结构示意图;图4为本发明环境监测装置局部结构的主视图;图5为本发明环境监测装置局部结构的侧视图;图6为本发明免爬器的第一整体结构示意图;图7为本发明免爬器的第二整体结构示意图;图8为本发明免爬器的整体侧图;图9为本发明免爬器的局部剖视图。
17.图中:防水底板1、防护侧板2、电动气缸3、防护顶板4、升降支座5、监测组件6、环保组件7、承重支座8、防尘机壳61、第一温度监测仪62、第二湿度监测仪63、电动推杆64、转动台65、第一感应探头66、第二感应探头67、蓄电池71、光伏发电机本体72、光伏板73、塔筒爬梯01、横梁架02、焊接底架03、传动顶轮04、固定座05、传动底轮06、升降钢索07、照明组件08、免爬组件09、电动导轨081、导向滑块082、连动杆083、第一灯座084、第一照明灯085、第二灯座086、第二照明灯087、驱动壳091、免爬器本体092、称重踏板093、电机座094、驱动电机095、驱动轮096、第一张紧轮097、第二张紧轮098。
具体实施方式
18.下面结合附图并通过实施例对本发明作进一步的详细说明,以下实施例是对本发明的解释而本发明并不局限于以下实施例。
19.实施例。
20.参见图1至图9,本实施例中,一种风电塔筒免爬器行进安全检测方法,包括如下步骤;步骤s1:现场环境设施检测,现场环境应满足载人提升装置的作业环境要求和仪器设备的使用环境要求,通过环境监测设备对现场环境进行监测;仪器设备的使用环境要求参照仪器设备操作规程及说明书,当发现设施和环境条件危及到检验结果或人身设备的安全时,应立即停止检验,待处理至符合使用要求;其中,现场环境条件基本要求:提升装置的电源为三相交流380v或交流220v,频率为50hz/60hz,供电系统在载人提升装置馈电线接入处的电压波动不应超过额定电压的
±
5%;载人提升装置检验的气候条件:环境温度:
‑
40℃至+50℃,24小时内的平均温度不超过+35℃;在+25℃的温度下相对湿度不超过95%;其中,环境监测设备包括防水底板1、防护侧板2、电动气缸3、防护顶板4、升降支座5、监测组件6、环保组件7和承重支座8,防水底板1的顶部端面边缘位置处固定安装有防护侧板2,防水底板1的顶部端面两侧均通过螺钉固定安装有电动气缸3,且电动气缸3的顶部
一端通过活塞杆连接安装有升降支座5,升降支座5的顶部一端固定安装有防护顶板4,防护顶板4的顶部端面设置有环保组件7,防水底板1的顶部端面中央固定安装有监测组件6,防水底板1的底部端面四周均固定安装有承重支座8;监测组件6包括防尘机壳61、第一温度监测仪62、第二湿度监测仪63、电动推杆64、转动台65、第一感应探头66和第二感应探头67,防尘机壳61固定安装在防水底板1的顶部端面中央,防尘机壳61的内部两侧分别固定安装有第一温度监测仪62和第二湿度监测仪63,防尘机壳61的顶部端面中央固定安装有电动推杆64,且电动推杆64的顶部一端连接安装有转动台65,转动台65的顶部端面两侧分别固定安装有第一感应探头66和第二感应探头67,第一感应探头66与第一温度监测仪62电性连接,第二感应探头67与第二湿度监测仪63电性连接;环保组件7包括蓄电池71、光伏发电机本体72和光伏板73,蓄电池71固定安装在防水底板1的顶部端面一侧,光伏发电机本体72固定安装在防护顶板4的底部端面一侧,且光伏发电机本体72与蓄电池71通过输电线连接,防护顶板4的顶部端面固定安装有光伏板73;通过承重支座8能够对防水底板1进行支撑,使得防水底板1具有稳定的支撑结构,通过环保组件7为该装置供电,电动气缸3工作时,推动活塞杆将升降支座5进行升降,使得升降支座5带动防护顶板4能够将高度调节,通过防护侧板2能够对监测组件6具有良好的防护效果,防尘机壳61内部的第一温度监测仪62和第二湿度监测仪63工作时,通过转动台65顶部的第一感应探头66和第二感应探头67能够对环境中的温度和湿度进行监测,并通过电动推杆64能够将第一感应探头66和第二感应探头67的高度进行调节,通过转动台65能够对第一感应探头66和第二感应探头67的角度进行调节,在防护顶板4的顶部,通过光伏板73以及防护顶板4底部的光伏发电机本体72能够进行光伏发电,并将电能储放在蓄电池71的内部,从而方便装置进行使用;其中,免爬器包括塔筒爬梯01、横梁架02、焊接底架03、传动顶轮04、固定座05、传动底轮06、升降钢索07、照明组件08和免爬组件09,塔筒爬梯01的顶部和底部端面一侧分别通过螺栓固定安装有横梁架02,塔筒爬梯01顶部横梁架02的外侧通过螺栓固定安装有焊接底架03,塔筒爬梯01的底部一端固定安装有固定座05,横梁架02的一侧均固定安装有传动端盖,塔筒爬梯01顶部一侧的传动端盖之间安装有传动顶轮04,塔筒爬梯01底部一侧的传动端盖之间安装有传动底轮06,传动底轮06与传动顶轮04之间连接安装有升降钢索07,升降钢索07的外侧设置有免爬组件09,且免爬组件09位于塔筒爬梯01的外侧,塔筒爬梯01的端面另一侧安装有照明组件08;免爬组件09包括驱动壳091、免爬器本体092、称重踏板093、电机座094、驱动电机095、驱动轮096、第一张紧轮097和第二张紧轮098,驱动壳091设置在升降钢索07的一侧,驱动壳091的外部固定安装有免爬器本体092,免爬器本体092的一端固定安装有称重踏板093,且称重踏板093的端面安装有体重秤,驱动壳091的内部一端固定安装有电机座094,电机座094的一端固定安装有驱动电机095,驱动电机095的一端通过驱动轴连接安装有驱动轮096,驱动轮096的顶部和底部分别通过转动轴连接安装有第一张紧轮097和第二张紧轮098,升降钢索07穿过第一张紧轮097、驱动轮096和第二张紧轮098;照明组件08包括电动导轨081、导向滑块082、连动杆083、第一灯座084、第一照明灯085、第二灯座086和第二照明灯087,两个电动导轨081分别固定安装在塔筒爬梯01的两
侧中央,电动导轨081的外部设置有导向滑块082,导向滑块082的一端固定安装有连动杆083,且两个连动杆083的一端固定安装有第一灯座084,第一灯座084的两侧端面均固定安装有第一照明灯085,第一灯座084的一端两侧均固定安装有第二灯座086,且第二灯座086的端面中央固定安装有第二照明灯087;使用时,通过塔筒爬梯01顶部一侧横梁架02和焊接底架03以及塔筒爬梯01底部一侧横梁架02和固定座05能够使得塔筒爬梯01的两端能够具有稳定的连接结构,从而使得该免爬器在升降的过程中具有稳定的结构;有利于提高升降时的安全性;在升降的过程中,通过免爬组件09与升降钢索07进行摩擦,从而达到起升的效果,使得升降钢索07在传动顶轮04和传动底轮06之间进行传动,在免爬组件09进行起升的过程中,通过照明组件08提高照明效果;在驱动壳091的内部,电机座094一侧的驱动电机095工作时,通过驱动轴带动驱动轮096转动,在第一张紧轮097和第二张紧轮098的作用下,使得驱动电机095能够与升降钢索07进行摩擦,从而能够使得驱动壳091以及免爬器本体092进行升降,当操作人员站在称重踏板093上时,通过称重踏板093上的体重秤能够称量体重,从而避免出现超载的情况;在驱动壳091和免爬器本体092进行起升的过程中,电动导轨081和导向滑块082工作,导向滑块082在电动导轨081的外侧移动,导向滑块082通过连动杆083带动第一灯座084进行起升,第一灯座084一侧安装的第一照明灯085,以及第二灯座086一侧安装的第二照明灯087能够进行照明,从而能够提高操作人员的采光效果,方便进行操作;步骤s2:设备外观检测;审查使用单位以下资料是否齐全,是否存档保管:a、整机产品质量合格证明;b、零部件产品质量合格证明;c、产品型式试验证明;d、安装自检报告;并检查使用单位本定检周期内自行检查报告及使用记录是否齐全,是否存档保管;免爬器应设铭牌,标明制造厂家、额定载重量和人数、重要技术参数标识,并张贴于明显部位;免爬器下部空间应有安全色标记,禁止免爬器正常运行时有人员进入;免爬器的承载支架应无明显可见的裂纹、变形、锈蚀;爬梯梯粱、踏棍应无明显变形、缺件、损坏等缺陷;爬梯与塔筒连接无明显松动、缺件、损坏等缺陷;其中,钢丝绳出现以下情况之一时,钢丝绳应报废:a、出现笼状畸变、绳芯挤出、扭结、部分压扁、弯折、断股等;b、钢丝绳直径30倍范围内出现断丝超过8处以上;c、钢丝绳磨损超过钢丝绳公称直径的7%;步骤s3:主要零部件检测,包括驱动装置、钢丝绳、车体、导轨及其附属装置的检测;1)驱动装置检测:驱动装置固定有效、固定螺栓无松动、缺失、锈蚀;驱动装置工作时无异响;驱动电机空载电流应符合规定限值,驱动电机散热风扇应有效,减速器无渗漏油;制动器应为常闭式,制动平稳可靠,制动器间隙应符合规定限值,制动器摩擦盘厚度应符合规定限值;驱动轮与钢丝绳配合顺畅,驱动轮运行时应无打滑现象,驱动轮与钢丝绳直径之比不应小于20倍,导向轮卷绕直径与钢丝绳直径之比不应小于16倍,驱动轮和导向轮
防脱槽装置工作有效;2)钢丝绳检测:新更换的钢丝绳应有合格证明,工作钢丝绳及安全钢丝绳公称直径不应小于6mm;工作钢丝绳与安全钢丝绳的悬挂应相互独立,钢丝绳应设张紧装置,且固定可靠,并处于张紧状态,钢丝绳末端连接、固定应牢固可靠,钢丝绳与电缆、平台等应无干涉现象;3)车体检测:车体各部件无松动、变形、损坏现象,车体操作手柄、急停按钮、转换开关正常,车体导向轮无异常磨损,沿导轨运行时无卡滞现象,车体与导轨之间永久性防脱装置有效,车体操作人员安全防护装置有效;4)导轨及其附属装置检测:每根导轨至少应有2个压板固定在爬梯支架上,导轨之间应采用接导板连结,导轨接头不错位,导轨与爬梯支架连结压板螺栓无松动、锈蚀或缺失,导轨无异常磨损、断裂;上、下限位板安装牢固,上、下缓冲装置固定牢固,无损坏,平台减速装置安装正确、牢固,顶轮组件固定牢固、无损换,固定压板及螺栓无锈蚀;步骤s4:安全保护和防护装置的检测,包括防坠保护装置、超载保护装置、限位保护装置、极限位保护装置、轮廓限位装置、紧急停止开关、减速报警装置、手动滑降装置、缓冲器和保护罩的检测;1)防坠保护装置检测:车体应设置独立于工作绳系统的防坠保护装置,使用人员应设置独立于车体防坠保护的防坠保护装置,防坠保护装置应工作可靠,锁定后无滑移现象,锁定状态下应不能自动复位,应在标定的有效期限内使用,标定的有效期限不应大于1年,防坠装置采用防坠落滑块模式时,防坠落滑块应当具有防装反设计;2)超载保护装置检测:超载保护装置在车体超载时应发出声光报警,并阻止免爬器启动或提升,直至超载状况解除;3)限位保护装置检测:免爬器应设置上、下极限装置,上、下极限装置动作应准确、可靠;其中,限位保护装置检测的过程中,当设置上极限开关时,检查极限开关应符合以下要求:a、在行程最上端应设置一个极限开关,其应能在轿厢与其他部件发生接触前切断动力供电,使轿厢停止;b、极限开关与限位开关不应共用一个触发元件;c、极限开关应由轿厢或其相关部件的运动直接触发;d、极限开关触发后,提升机必须等到手动解除才能恢复运行。
21.4)极限位保护装置检测:免爬器应设置上、下行程限位装置,上、下行程限位装置动作应准确、可靠;5)轮廓限位装置检测:对设置有轮廓限位装置的,当平台盖板未打开或运行遇到障碍时,车体立即停止运行;轿厢底部和顶部均应设置轮廓限位装置,轿厢底部应为无死点下轮廓限位,轿厢运行过程中,当升降机运行区域内有障碍物触碰轮廓限位时,使轿厢停止运行;6)紧急停止开关检测:免爬器车体面板、遥控器、电控箱上应设置红色急停开关,有明显的停止标记,按压后不能自动复位;7)减速报警装置检测:车体通过塔筒法兰、平台盖板时,应有自动减速及通过后自
动恢复正常运行速度并配合声光报警的功能;8)手动滑降装置检测:免爬器应设置断电时可使车体平稳下降的手动滑降装置,动作可靠;9)缓冲器检测:免爬器应在车体运行的上下极限位置设置刚性限位缓冲装置;10)防护罩检测:免爬器外露转动部分应设置防护罩;步骤s5:控制系统的检测;包括控制方式、控制装置和遥控器的检测;1)控制方式检测:免爬器应设置车体、电控箱和手持遥控三种控制方式,且车体具有优先控制权,互锁功能应有效,控制方式为点动控制,电控箱控制应有自动控制及强制回车功能;2)控制装置检测:控制装置应符合以下要求:a、应车体面板、遥控器、电控箱上应设置上升、下降开关;b、控制盒、遥控装置的控制电源应为安全电压,电压不应大于36v;c、车体应当设置为双手手指按压式操控,只有双手手指同时按压操控按钮时车体才能运行;d、按钮盘按钮应动作可靠,标识清晰、准确;3)遥控器检测:遥控器应工作正常,电池电量充足,遥控器电池有电压信号显示和电压低报警功能,在控制箱上可直接充电,遥控器的无线信号为专用无线信号;步骤s6:电气系统的检测;包括接地、电气绝缘、总电源接触器、短路保护和漏电保护的检测;1)接地检测:供电用电源,零线n与保护线pe应当始终分开,电气系统设备外壳应根据配电网情况可靠接地,保护接零或保护接地,tt系统应设置漏电保护装置,接地电阻不大于4ω,所有电气设备及线管、线槽的外露可导电部分应当与保护线pe可靠连接,电气系统为安全电压的除外;2)电气绝缘检测:动力电路、照明电路和电气安全装置电路的绝缘电阻应当不小于2mω;3)总电源接触器检测:供电电源应设总电源接触器,总电源接触器应能可靠地切断免爬器的动力电源;4)短路保护检测:应至少设置一级短路保护,自动断路器或者熔断器;5)漏电保护检测:应设漏电保护装置,其剩余动作电流、动作时间应符合相关要求;步骤s7:噪声的检测;额定载重量下运行时,应无异常震动和声响,正常操作及运行时通过噪音值不应大于79db;步骤s8:运行试验的检测;车体以正常运行速度上下运行,操纵机构、控制系统、安全防护装置和制动器动作可靠、准确,与其他结构无干涉;各机构动作平稳、运行正常、无异常声响,能实现规定的功能;步骤s9:新安装首次定期检验附加的检测;包括:静载荷试验、动载荷试验、制动性能试验、坠落试验和性能试验的检测;1)静载荷试验检测:车体均布125%额定载重量,检查是否符合以下要求:a、主要受力构件无明显裂纹、永久变形、油漆剥落;主要构件连接处未出现连接松
动或者损坏;b、无影响性能和安全的其它损坏;c、防坠装置作用状态下,静置10min,下滑量≤10mm;2)动载荷试验检测:车体均布110%额定载重量,检查是否符合以下要求:a、各机构、零部件等工作正常;b、各机构、结构件无损坏,连接处无松动;3)制动性能试验检测:车体均布150%额定载重量时,制动器作用15min,滑移距离不得大于10mm,车体装载125%额定载重量时,制动距离不大于100mm;4)坠落试验检测:按照相应要求进行车体坠落试验,按新安装免爬器不少于5%比例抽查,且至少不能少于1台,检查是否符合以下要求:a、防坠保护装置应符合工作可靠,锁定后无滑移现象;b、锁定状态下应不能自动复位;c、防坠保护装置锁止距离≤200mm;其中,性能试验包括运行试验和提升力试验;1)运行试验包括:使用助爬器上下全程运行,操纵机构、安全防护装置动作可靠、准确,机构动作平稳、运行正常,能实现规定的功能,主要零部件无损坏、连接处无松动;2)进行提升力试验时,分别选择助力挡位,测试助爬器提升力在相应挡位
±
10%范围内。
22.本说明书中未作详细描述的内容均属于本领域专业技术人员公知的现有技术。
23.虽然本发明已以实施例公开如上,但其并非用以限定本发明的保护范围,任何熟悉该项技术的技术人员,在不脱离本发明的构思和范围内所作的更动与润饰,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1