一种基于六轴机械臂的轻量化自动发药系统和方法
本发明属于医疗机器人,尤其涉及一种基于六轴机械臂的轻量化自动发药系统和方法。
背景技术:
1、如今,自动发药机开始入驻各大医院药房,药房自动发药机的使用提高了医院的发药效率,并节省了病人等药的时间。现有的药房自动发药机结构往往比较复杂,体积比较庞大,成本高,安装工程量大,在基层医疗机构尤其是社区医疗点难以应用。
2、鉴于此,需要一种结构简单的轻量化自动发药系统和方法,可以用于社区医疗点,实现自动发药功能,减轻基层医疗工作人员的负担,促进我国社区医疗机构的发展。
技术实现思路
1、为了解决现有技术中的上述问题,即结构复杂,体积庞大,成本高,安装工程量大的问题,本发明提供了一种基于六轴机械臂的轻量化自动发药系统和方法,完成自动发药工作。
2、为实现上述目的,本发明采用以下技术方案:
3、本发明提供了一种基于六轴机械臂的轻量化自动发药系统,包括六轴机械臂、抓取装置、药物柜台、药物仓库、pc机和盒装药物,其中所述的抓取装置和所述的六轴机械臂的末端工具法兰盘相连,所述的pc机通过以太网端口和所述的六轴机械臂相连,所述的药物柜台和所述的药物仓库放置在所述的六轴机械臂周围其臂展能够覆盖的范围内,所述的盒装药物为方盒包装;
4、所述的六轴机械臂用于搬运所述的盒装药物在所述的药物柜台和所述的药物仓库之间移动;
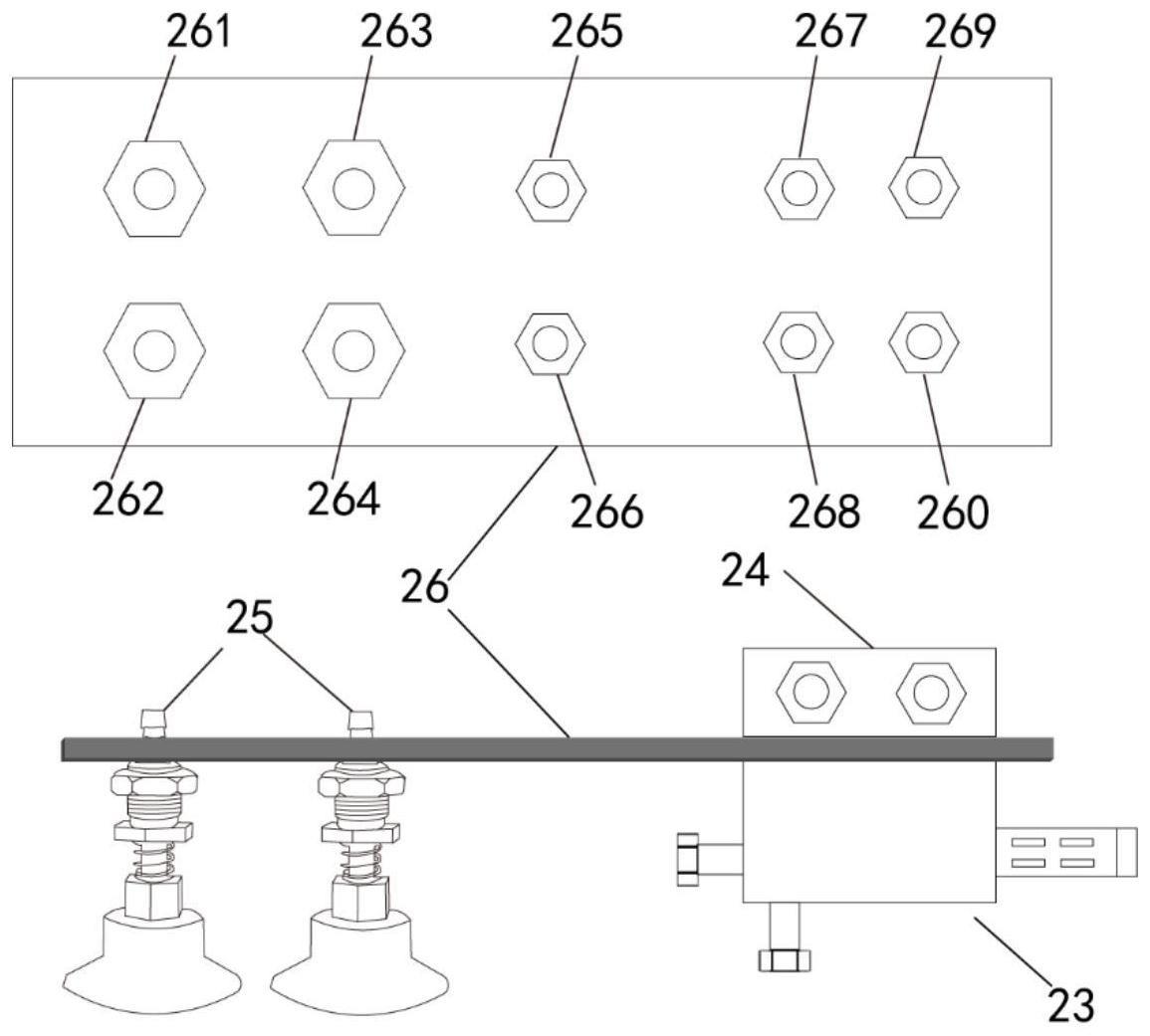
5、所述的抓取装置采用真空吸力原理来吸放所述的盒装药物,由空压机、电磁阀、真空发生器、气排、吸盘和工具头安装板组成;所述的真空发生器、气排、吸盘固定在所述的工具头安装板上,所述的工具头安装板安装在所述的六轴机械臂末端的工具法兰盘上;所述的空压机、电磁阀、真空发生器、气排、吸盘通过气管连接在一起,在吸盘的吸嘴上产生真空,吸取盒装药物;所述的空压机提供气压,所述的pc机通过io口开启或者关闭所述的电磁阀,气体经过所述的真空发生器后,经过所述的吸盘,产生真空或者释放真空,实现对所述的盒装药物的抓取和释放动作。
6、所述的六轴机械臂的工具中心设定为所述的吸盘下端平面的中心点,即以4个吸嘴中心为顶点的矩形的中心;
7、所述的工具头安装板共有10个大小不同的孔洞,其中四个孔用于固定所述的吸盘,两个孔用于固定所述的真空发生器,两个孔用于固定所述的气排,两个孔用于固定至所述的六轴机械臂的末端工具法兰盘上。
8、所述的药物柜台用于所述的盒装药物出入库时摆放药物,由l型铝板和矩形底板组成。对于入库,要求同种盒装药物每次的摆放位置是固定的,因此设计了l型铝板,摆放时,要求药物方盒的一角顶住所述的l型铝板和所述的矩形底板形成的墙角。
9、以所述的墙角为原点ob,垂直于所述的矩形底板方向向上为zb轴,以所述的l型铝板和所述的矩形底板的交线为xb轴和yb轴,建立坐标系obxbybzb。
10、所述的药物仓库用于存放所述的盒装药物,存放时采用同类盒装药物叠放的方式,因此,在底板上会形成一些虚拟框,即为一类药物的存放区域。所述的虚拟框的大小、位置、数量以及分布可以根据仓库中药物的种类和数量动态调整,有利于提高自动发药系统的空间利用率。
11、以所述的底板的左上角为原点os,垂直于所述的底板方向向上为zs轴,以所述的底板的两条边线为xs轴和ys轴,建立坐标系osxsyszs。
12、所述的pc机用于处理数据和控制所述的六轴机械臂搬运盒装药物,监控所述的药物库存数据,为系统控制中心。
13、所述的pc机中包含一个药房库存数据库,其中包含一张药物库存表,属性包括“药物名称”、“数量”、“药盒长l”、“药盒宽w”、“药盒高h”、“存放位置x”和“存放位置y”。“药物名称”的类型为字符串,“数量”的类型为整形,表示该种药物在仓库中的数量,单位为盒;“药盒长l”、“药盒宽w”和“药盒高h”的类型都为整形,分别表示药盒的长、宽、高,单位为mm;“存放位置x”和“存放位置y”的类型都为整形,分别表示药物存放区域中心的横坐标和纵坐标,单位为mm;
14、本发明提供了一种基于六轴机械臂的自动药物入库方法,包括如下步骤:
15、s1在药物柜台上放置盒装药物,并且在pc机上输入药物种类、药盒尺寸(长l、宽w、高h,l>w>h)和数量n,放置药物时,要求药物方盒的一角顶住l型铝板和矩形底板形成的墙角,且长边平行于yb轴,宽边平行于xb轴,高边平行于zb轴;
16、s2 pc机查询药房库存数据库药物库存表,获取该盒装药物存放区域位置(用“存放位置x”和“存放位置y”的值x和y来表示,下同);
17、若数据库中没有该种药物,则在药物仓库中分配一个空白区域给该种药物,作为该种药物的存放区域,记录在药房库存数据库中,更新数据库,即增加一条该种药物的记录,数量初始化为0;如果药物仓库中没有足够大区域分配给该种药物,则pc机显示仓库已满,新药物无法入库,药物入库失败;
18、若数据库中该种药物已经存满,则pc机显示库存已满,药物入库失败;
19、否则,读取数据库中该种药物对应记录的存放区域位置x和y以及库存数量m;
20、s3 pc机控制六轴机械臂从药物柜台抓取该药物盒装药物至存放区域,更新数据库,即该种药物对应记录中的数量m加1,具体步骤如下:
21、s3.1 pc机控制六轴机械臂移动至坐标系obxbybzb下坐标(w/2,l/2,n·h)处;
22、s3.2 pc机通过控制电磁阀开启产生真空吸取盒装药物;
23、s3.3 pc机控制六轴机械臂移动至坐标系osxsyszs下坐标(x,y,m·h+h)处;
24、s3.4 pc机通过控制电磁阀关闭释放真空放下盒装药物;
25、s3.5更新数据库,即该种药物对应记录中的库存数量m加1,剩下的未入库盒装药物数量n减1;
26、s3.6 pc机控制六轴机械臂回待命位置,待命位置为人工设定的固定位置;
27、s4重复s2-s3,直到所有的盒装药物存放完成,即n=0。
28、本发明还提供了一种基于六轴机械臂的自动发药方法,包括如下步骤:
29、s1 pc机根据处方生成药物清单,包括药物种类和数量;
30、s2取药物清单中的一盒装药物,查询药房库存数据库药物库存表:
31、如果不存在该药物,pc机报警,显示不存在该药物;
32、如果库存数量m为0,pc机报警,显示库存不足;
33、否则,读取该药物对应记录中的存放区域位置x和y、药盒长l、药盒宽w、药盒高h以及库存数量m;
34、s3根据s2中读取的存放区域位置x和y,pc机控制六轴机械臂从药物仓库中抓取该盒装药物至药物柜台,具体步骤如下:
35、s3.1 pc机控制六轴机械臂移动至坐标系osxsyszs下坐标(x,y,m·h)处;
36、s3.2 pc机通过控制电磁阀开启产生真空吸取盒装药物;
37、s3.3 pc机控制六轴机械臂移动至坐标系obxbybzb下坐标(w/2,l/2,h)处;
38、s3.4 pc机通过控制电磁阀关闭释放真空放下盒装药物,库存数量m减1;
39、s3.5 pc机控制六轴机械臂回待命位置,待命位置为人工设定的固定位置;
40、s4提示患者拿走盒装药物,将清单中对应药物的数量减1;
41、s5重复s2-s4,直到药物清单中所有的盒装药物发放完成。
42、通过发明人反复试验、观测和比较,在采用本发明的技术方案的情况下,采用机械臂代替人工来发药,提高了工作效率;药物仓库仅仅为一块平板,结构简单;药物仓库的布局可以根据药物种类和数量动态调整,提高了空间利用率。
- 还没有人留言评论。精彩留言会获得点赞!