一种大型罐体角度位置校正方法与流程
1.本发明涉及大型罐体施工领域,具体涉及一种大型罐体角度位置校正方法。
背景技术:
2.大型罐体的容积300m3‑
20000m3,直径覆盖5~50米,重量从几十吨到千吨,在安装过程中罐体经常会围绕圆心转动偏移(参见图5所示),由于重量较大以及场地受限,在工程施工时通过人工、吊装等常规措施无法实现罐体的矫正。这种安装过程中的偏移,会给整个工程的其他附属设施安装带来极大的困难,同时造成巨大的工程成本增加。
技术实现要素:
3.本发明为解决现有技术的不足,提供了一种大型罐体角度位置校正方法。
4.为实现上述目的,本发明提供了以下技术方案:
5.一种大型罐体角度位置校正方法,包括以下步骤:步骤一,检测罐壁的参考法兰口的偏移角度,利用多个升降机将罐壁整体提升到一定的高度;步骤二,在罐壁的外侧底部安装多个角度矫正器,所述角度矫正器与罐壁的底部转动连接,角度矫正器的下端与罐体外部的地基接触;步骤三,控制所有的升降机做同步下降运动,根据罐壁下降的高度和转动的角度控制下降速度,罐壁下降的过程中围绕其圆心转动;步骤四,实时检测罐壁参考法兰口的偏移角度,当检测到罐壁参考法兰口的偏移角度调整为零时升降机停止下降,然后将所有的角度矫正器拆除,罐壁的矫正完毕。
6.进一步的,所述角度矫正器与罐体的外壁相切,所有的角度矫正器与水平面之间的夹角大小相等,所述角度矫正器围绕罐体的轴线呈环圆周阵列分布。
7.进一步的,所述角度矫正器与水平面之间的夹角为45度。
8.进一步的,所述角度矫正器为型钢。
9.进一步的,所述步骤一中,升降机将罐壁提升的高度h=sinθ
·
l;式中,θ为角度矫正器与水平面之间的夹角角度;l为角度矫正器与罐壁底部的连接点下方的角度矫正器长度。
10.进一步的,所述罐壁由多个具有一定弧度的矩形板拼接而成,所述矩形板的边缘开设有安装孔,罐壁上相邻的矩形板之间通过插入安装孔内的螺钉密封连接。
11.进一步的,所述角度矫正器通过一个螺栓与罐壁的底部连接,角度矫正器上设置有用于螺栓穿过的通孔,螺栓直接插入罐壁最底层的矩形板上的安装孔内。
12.进一步的,所述角度矫正器的数量与罐壁一周的矩形板数量相等。
13.进一步的,所述角度矫正器的数量为罐壁一周的矩形板数量的两倍,相邻的两个矩形板拼接缝的两侧均设置一个角度矫正器。
14.与现有技术相比,本发明大大降低了偏移罐体的调节难度,操作过程简单,同时作业的过程中使用的角度矫正器容易取材,而且拆装也十分方便,有效的降低了工程成本。
附图说明
15.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
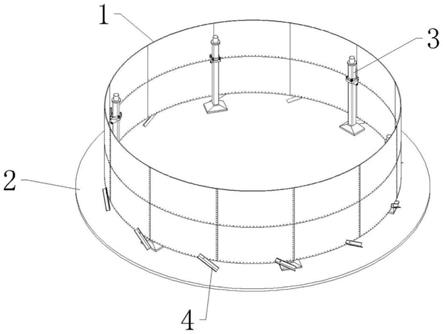
16.图1是本发明在实施时的示意图;
17.图2是角度矫正器与矩形板的装配示意图;
18.图3是角度矫正器的数量为罐壁一周的矩形板数量的两倍时角度矫正器的装配示意图;
19.图4是本发明中对角度矫正器与罐壁的连接点进行受力分析时的示意图;
20.图5是罐体上的管口设计位置以及罐体偏移后的示意图。
21.附图标记说明如下:
22.图中:1、罐壁;101、矩形板;2、地基;3、升降机;4、角度矫正器;5、螺栓。
具体实施方式
23.为使本发明的目的、技术方案和优点更加清楚,下面将对本发明的技术方案进行详细的描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本发明所保护的范围。
24.参见图1
‑
图3所示,本发明提供了一种大型罐体角度位置校正方法,包括以下步骤:
25.步骤一,检测罐壁1的参考法兰口的偏移角度,利用多个升降机3将罐壁1整体提升到一定的高度;
26.步骤二,在罐壁1的外侧底部安装多个角度矫正器4,所述角度矫正器4与罐壁1的底部转动连接,角度矫正器4的下端与罐体外部的地基2接触;
27.步骤三,控制所有的升降机3做同步下降运动,根据罐壁1下降的高度和转动的角度控制下降速度,罐壁1下降的过程中围绕其圆心转动;
28.步骤四,实时检测罐壁1参考法兰口的偏移角度,当检测到罐壁1参考法兰口的偏移角度调整为零时升降机3停止下降,然后将所有的角度矫正器4拆除,罐壁1的矫正完毕。
29.本发明中,所述角度矫正器4与罐体的外壁相切,所有的角度矫正器4与水平面之间的夹角大小相等,所述角度矫正器4围绕罐体的轴线呈环圆周阵列分布。参见图4所示,对每个角度矫正器4与罐壁1的连接点进行受力分析可得,每个角度矫正器4对罐壁1的支撑力f
支
在水平方向的分力f
推
≈g/(n
·
tanθ);其中,其中g为罐壁1的重力;n为角度矫正器4的数量;θ为角度矫正器4与水平面之间的夹角角度。
30.作为优选的实施方式,所述角度矫正器4与水平面之间的夹角为45度,此时每个角度矫正器4对罐壁1的支撑力在水平方向的分力f
推
≈g/n,随着升降机3的下落,角度矫正器4与水平面之间的夹角逐渐减小,每个角度矫正器4对罐壁1的支撑力在水平方向的分力将变大,因此角度矫正器4更容易推动罐壁1整体转动。所述角度矫正器4可以为型钢,例如方钢、圆钢、扁钢、角钢、槽钢中的任意一种。
31.参见图2所示,所述步骤一中,升降机3将罐壁1提升的高度h=sinθ
·
l;式中,θ为角度矫正器4与水平面之间的夹角角度;l为角度矫正器4与罐壁1底部的连接点下方的角度矫正器4长度。
32.本发明中所述罐壁1由多个具有一定弧度的矩形板101拼接而成,所述矩形板101的边缘开设有安装孔,罐壁上相邻的矩形板101之间通过插入安装孔内的螺钉密封连接。所述角度矫正器4通过一个螺栓5与罐壁1的底部连接,角度矫正器4上开设有用于螺栓5穿过的通孔,螺栓5直接插入罐壁1最底层的矩形板101上的安装孔内。
33.本发明中,所述角度矫正器4的数量为罐壁1一周的矩形板101数量的一倍或者两倍。在具体实施时,角度矫正器4的数量与罐壁1一周的矩形板101数量的倍数关系可以根据罐壁1整体的重量来定。当罐壁1整体的重量较小时,角度矫正器4的数量与罐壁1一周的矩形板101数量相等。当罐壁1整体的重量较大时,所述角度矫正器4的数量为罐壁1一周的矩形板101数量的两倍,相邻的两个矩形板101拼接缝的两侧均设置一个角度矫正器4,角度矫正器4安装在矩形板101拼接缝两侧第3~4个安装孔的位置。
34.本发明大大降低了偏移罐体的调节难度,操作过程简单,同时作业的过程中使用的角度矫正器容易取材,而且拆装也十分方便,有效的降低了工程成本。
35.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1