堆叠存储组件的制作方法
1.本发明涉及一种带有大量容器堆叠空间、在重力方向上布置在容器堆叠空间下方的运送空间和在运送空间中可移动的运送车辆的堆叠存储组件,该运送车辆具有举升装置,容器以其可被转移到容器堆叠空间中或从容器堆叠空间中被转移出,其中,每个容器堆叠空间在其在重力方向上下部的端部处具有带有至少一个保持元件的保持装置,该保持元件通过布置在运送车辆处的操纵装置在其中其对抗重力保持布置在容器堆叠空间中的容器的保持位置与在其中容器在保持元件处可被转移经过的释放位置之间可移动。
背景技术:
2.在这样的堆叠存储组件中,容器可被堆叠在容器堆叠空间中。在此,容器堆叠空间优选以带有行和列的矩阵形式布置。当容器应被存入在容器堆叠空间中时,其布置在运送车辆的举升装置上。运送车辆然后行驶穿过运送空间,直至其处在经预先确定的或期望的容器堆叠空间下方。举升装置然后举升容器,直至其经过保持装置。在举升容器的情形中,保持元件被移动到释放位置中。一旦容器或容器的负责容器在保持装置中之后保持的部分经过保持装置,保持元件可被再次转移到保持位置中。当举升装置下降容器时,保持元件与容器处在接合中且对抗重力的作用保持住容器。运送车辆然后可在相应的容器堆叠空间下方被移开。当在容器堆叠空间中事先已存在一个或多个容器时,在举升装置举升的情形中整个堆叠被举升,一旦所举升的容器与堆叠的最下部的容器处在接触中。在其它情况下,存入过程是相同的。
3.在将容器从容器堆叠空间中取出的情形中,运送车辆被再次使用。运送车辆被行驶到容器堆叠空间之下且举升装置被举升,直至其与到容器堆叠空间中的容器堆叠的最下部的容器处在接触中。举升装置然后举升容器,如有可能与处在其上的另外的容器的堆叠一起。一旦举升装置未被加载,保持元件可被移动到释放位置中。容器堆叠然后被下降。
4.然而在下部的容器经过保持装置期间,保持元件须被保持在释放位置中。
技术实现要素:
5.本发明基于如下目的,即,以简单的方式使得容器从容器堆叠空间中的取出成为可能。
6.该目的在先前所提及的形式的堆叠存储组件的情形中由此来实现,即,运送车辆具有至少一个可被转移到固定位置中的固定元件,其在固定位置中与处在释放位置中的保持元件共同起作用且将保持元件保持在释放位置中。
7.人们于是额外于操纵装置(该操纵装置将保持元件移动到释放位置中)使用一种布置在运送车辆处的固定元件。一旦保持元件处在释放位置中,保持元件可通过固定元件被固定在该处,从而使得待取出的容器可经过保持装置。一旦保持元件被保持在释放位置中不再必要,该固定元件可被移除,从而使得保持元件可被再次移动到保持位置中。
8.优选地,运送车辆具有操纵固定元件的控制装置,当保持元件处在释放位置中时。
控制装置于是确保一定顺序的流程,当容器应从容器堆叠空间中被取出时。首先,通过操纵装置保持元件须从保持位置中被移动到释放位置中。其后,固定元件才可被操纵,以便于将保持元件保持在释放位置中。
9.在一种优选的设计方案中,保持元件构造成带有具有用于容器的支承面的第一臂和第二臂的双臂杠杆且固定元件作用到第二臂上。固定元件于是不处在用于容器的支承面之下且由此可不干扰容器的移动。
10.更优选地,保持元件布置在容器堆叠空间与运送空间之间布置的支架中且固定元件可被移动到处在释放位置中的保持元件与支架之间的间隙中。保持元件然后可经由固定元件支撑在支架处。支架可例如构造成框架,其包围在一个或多个容器堆叠空间的下端部处的一个或多个开口。
11.优选地,固定元件具有逐渐变细的尖部。因此,固定元件的移动变得容易。即使当运送车辆不精确处在容器堆叠空间下方的理论位置中时,如此地移动固定元件是可能的,即,该固定元件可与处在释放位置中的保持元件共同起作用。
12.优选地,支架具有用于固定元件的导向装置。逐渐变细的尖部然后可进入到导向装置中。在进一步移动的情形中,固定元件被自动地引导到期望的位置中,在该位置中固定元件可保持或固定处在释放位置中的保持元件。
13.在此如下是优选的,即,导向装置具有布置在保持元件下方且在容器移动路径之外的通道。该通道可例如构造成在板或支架的另一部分中的钻孔。
14.优选地,固定元件在未经操纵的位置中垂直于重力方向相比在经操纵的位置中更近地伸出超过运送车辆。固定元件于是当其不被需要用于将保持元件固定在释放位置中时可以说被移入到运送车辆中。在理想情况中,运送车辆的外轮廓、即运送车辆横向于重力方向的轮廓不被在未经操纵的位置中的固定元件增大。
15.在此如下是优选的,即,固定元件在构造在运送车辆处的转弯导向装置中被引导。这是一种简单的可行性方案,用于在举升的情形中逆着重力方向从运送车辆的轮廓中移出固定元件而在重力方向上下降的情形中被再次引入到在运送车辆的轮廓内的空间中。运送车辆自身于是可相对精确地针对在运送空间中的需求来设计,例如针对如下,即,容器堆叠空间侧面被支柱限制,该支柱达到直至在其上运送车辆在运送空间中可移动的底部。
16.优选地,举升装置具有带有容器支承面的举升框架,其中,举升框架构成操纵装置的至少一部分。人们例如不再需要另外的可移动的元件,以便于将保持元件从保持位置中移动到释放位置中。当容器被存入到容器堆叠空间中时,于是保持元件通过容器自身被打开,当容器被举升时。当容器应从运送空间中被取出时,于是保持元件通过举升框架被打开且通过固定元件被保持在被打开的位置中、也就是说在释放位置中。
附图说明
17.本发明在下面借助一个优选的实施例与附图相联系地进行描述。其中:图1 显示了堆叠存储组件的透视性的示意性视图,图2 显示了在容器堆叠空间的下端部处的框架组件的透视图示,图3 显示了属于堆叠存储组件的运送车辆,图4 显示了带有固定元件的固定装置的示意性图示,
图5 显示了用于说明固定元件的移动的示意性图示,图6 显示了用于说明容器到容器堆叠空间中的存入的图示,图7 显示了用于说明容器从容器堆叠空间中取出的示意性图示,且图8 显示了用于说明固定元件的工作原理的示意性图示。
具体实施方式
18.图1显示了带有大量容器堆叠空间2的堆叠存储组件1。在容器堆叠空间2的在重力方向上在下部的端部处布置有运送空间3。在运送空间3与容器堆叠空间2之间设置有框架组件4。
19.堆叠存储组件1具有大量垂直布置的支撑5,其通过水平的横向支撑6,7彼此相连接。
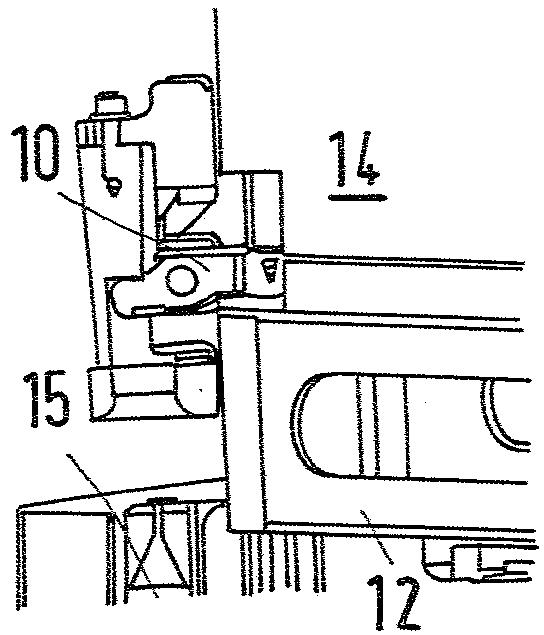
20.在每个容器堆叠空间2的下端部处构造有开口8,其设置在框架组件4中。为此,框架组件4具有多个框架元件形式的支架9,其例如可被彼此拧紧。在框架元件的每个棱角中布置有保持元件10。框架元件的四个保持元件于是构成保持装置。保持元件10和其功能进一步在下面进行详细说明。
21.出于清晰性原因,在图1中未示出属于堆叠存储组件1的运送车辆11。该运送车辆11在图3中被示出。
22.运送车辆11具有举升框架12,其可经由未详细示出的举升驱动器被举升和下降。举升框架12具有容器支承面13,在图6和7中被示出的容器14可被放置到其上。
23.额外于举升平台12和其举升驱动器,运送车辆11还具有多个固定元件15,其经由固定元件驱动器16可被举升和下降。此外,运送车辆11具有多个车轮17,18,运送车辆11以其可在运送空间3中被行驶。
24.每个固定元件15在转弯导向装置16中被引导。在此,固定元件15布置在载体19处,其经由两个滚轮20,21在转弯导向装置16中被引导。当固定元件15通过固定元件驱动器16被举升时,其从在图5a中未经操纵的位置被转移到在图5c中所示出的经操纵的位置中。在此,其横向于重力方向从运送车辆11中被移出。当固定元件15被再次下降时,其再次垂直于重力方向被移入到运送车辆11中。由此可实现如下,即,固定元件15不垂直于重力方向伸出超过运送车辆11的外轮廓,当运送车辆11在运送空间3中被行驶时。固定元件驱动器16同时作用到两个固定元件15上。为此,两个固定元件15经由横梁22彼此相连接。横梁22又在直线导向装置23中被引导。在未进一步示出的方式中,固定元件驱动器16同样还可具有遮盖件。
25.固定元件15具有逐渐变细的尖部24,其工作原理进一步在下面进行说明。其此外可具有圆柱形形状或在横截面上具有多边形形状。
26.图6显示了容器14如何被存入到容器堆叠空间2中。
27.如下被示出,即,另一容器25已经处在容器堆叠空间2中。该另外的容器25支撑在处在支架9的棱角中的保持元件10上。仅单个保持元件10被示出。
28.保持元件10构造成双臂式杠杆,带有具有容器支承面27的第一臂26和第二臂28。保持元件围绕轴线29被可摆动地支撑。
29.支架9在第二臂28下方具有导向装置30,固定元件15可进入到其中,当其被举升时。导向装置30布置在用于容器14的移动路径之外。
30.图6a显示了起始位置,在其中待存入到容器堆叠空间2中的容器14由下方被移动靠近到已处在容器堆叠空间2中的容器25处。在图6b中,新的容器14接触已处在容器堆叠空间中的容器25。
31.在图6c中示出了两个容器14,25如何被共同地举升。在此,新待存入的容器14与保持元件10处在接触中,更精确地说与保持元件10的第一臂26且将保持元件10从在图6a至6c中所示出的保持位置摆动到在图6d中所示出的释放位置中。容器14可在保持元件10的释放位置中在保持元件10处被移动经过。此处,容器14与举升容器14的举升框架12一起构成操纵装置。
32.新待存入的容器14通过运送车辆11的举升平台12被进一步举升,直至容器14的保持几何结构31经过保持元件10。保持元件10然后再次返回到保持位置中(图7a),从而使得容器14可支撑在保持元件10上。如有可能,保持元件10从释放位置(图6d)到保持位置(图7a)中的返回移动可通过未详细示出的弹簧来支持。
33.图7显示了容器14如何从容器堆叠空间中被取出。
34.举升平台12被举升,直至其接触容器14。容器14然后处在容器支承面13上。保持元件10伸入到在容器14的下端部处的布置在保持几何结构31的区域中的空隙32中。
35.当举升框架12被进一步举升时,首先保持元件10由容器14的负载被取消。保持元件10于是是无负荷的。当举升框架12被进一步举升时,其可将保持元件10摆动到释放位置中。在该情况中,举升框架12单独构成操纵装置。
36.为了当举升框架12被下降时阻止保持元件10到保持位置中的返回移动,在图7d中所示出的位置中固定元件15被操纵。
37.该作用在图8中被示出。图8a显示了在保持位置中的保持元件10,在其中容器14可被放置在第一臂26的支承面27上。图8b显示了释放位置,在其中保持元件10通过固定元件15被保持。在此,固定元件15被移动通过导向装置30。导向装置30可在其下端部处被倒圆地或圆锥形地构造,以便于使得固定元件15的尖部24的穿入变得容易。通过导向装置30确保如下,即,固定元件15在举升的情形中在支架9与保持元件10的第二臂28之间被移动。在此,固定元件15作用到第二臂28上且防止如下,即,第二臂28可再次在朝向支架9的方向上被摆动。
38.作为支架9的替代同样可使用其它的用于保持保持元件10的可行性方案。
39.举升框架12的未详细示出的举升驱动器和固定元件驱动器16与同样未详细示出的控制装置相连接。控制装置确保如下,即,当保持元件10处在释放位置中时,固定元件15才可被行驶到在图8b中所示出的固定位置中。这可例如由此被确保,即,人们使用确定保持元件10的位置的传感器,或由此被确保,即,人们监控用于举升框架12的举升装置的举升行程,其中,当举升框架12被如此程度地举升,即其将保持元件10摆动到释放位置中、也就是说被打开的位置中时,于是固定元件15才可被举升。
40.如在图8中可辨认出的那样,保持元件10以其第二臂28在保持位置中在重力方向上由下方贴靠在支架9处。支架9于是不仅被用于构成用于在保持位置中的保持元件10的移动限制,而且由此用于构成用于固定元件15的支撑,当保持元件10处在释放位置中时。因为固定元件15通过支架9被支撑时,其可相对较弱地来定义尺寸。其仅须能够填满在支架9与保持元件10的第二臂28之间的间隙,当保持元件10处在图8b中所示出的释放位置中时。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1