一种机械制造用户外移动式抓取装置的制作方法
1.本发明涉及抓取技术领域,尤其涉及一种机械制造用户外移动式抓取装置。
背景技术:
2.机械制造指从事各种动力机械、起重运输机械、化工机械、纺织机械、机床、工具、仪器、仪表及其他机械设备等生产的工业部门。机械制造业为整个国民经济提供技术装备。
3.在机械制造的过程中,需要对零件进行搬运,现有的搬运方式,一般都是通过机械爪进行抓取运输,但对于户外作业,往往运输路程相对较远,途中容易出现零件掉落的情况,一旦零件与地面硬性接触,容易造成不同程度的损伤,影响后期的正常使用,而且户外用机械抓取设备,其机械臂长期暴露的在外侧,容易受到外界灰尘的污染,长时间降低其使用寿命。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种机械制造用户外移动式抓取装置。
5.为了实现上述目的,本发明采用了如下技术方案:一种机械制造用户外移动式抓取装置,包括装置本体,所述装置本体底端开设有空腔,所述空腔内部设置有支撑板,所述支撑板一端对称设置有推动板,所述空腔内部水平安装有驱动气缸,所述驱动气缸一端与推动板固定,所述支撑板顶部表面竖直设置有缓冲弹簧,所述缓冲弹簧顶端设置有橡胶垫,所述支撑板底端设置有辅助滚轮。
6.作为上述技术方案的进一步描述:
7.所述装置本体顶部表面安装有固定底座,所述固定底座顶部表面安装有旋转云台,所述旋转云台顶部安装有机械臂,所述机械臂一端设置有安装块,所述安装块底端设置有机械爪。
8.作为上述技术方案的进一步描述:
9.所述机械臂外侧表面设置有防护罩,所述防护罩顶端通过第一安装板与安装块固定连接,所述防护罩底端通过第二安装板与固定底座固定连接,所述防护罩内部设置有第一无纺布层和第二无纺布层,所述第一无纺布层和第二无纺布层之间设置有弹簧杆,所述防护罩表面设置有拉链。
10.作为上述技术方案的进一步描述:
11.所述固定底座底端设置有螺纹套,所述空腔内部水平安装有螺杆,所述固定底座通过螺纹套与螺杆螺旋连接,所述螺杆一端设置有步进电机。
12.作为上述技术方案的进一步描述:
13.所述装置本体顶部表面开设有滑道,且滑道开设有两个,并且两个滑道对称开设在装置本体顶部表面。
14.作为上述技术方案的进一步描述:
15.所述装置本体一端设置有配重块,所述配重块一侧设置有脚踏板。
16.作为上述技术方案的进一步描述:
17.所述缓冲弹簧设置有多个,且多个缓冲弹簧等距离安装在支撑板与橡胶垫之间。
18.作为上述技术方案的进一步描述:
19.所述装置本体顶部一端竖直安装有竖板,所述竖板表面安装有方向盘,所述竖板一侧设置有驱动机构,所述竖板顶部设置有控制面板,所述装置本体底端设置有万向轮。
20.与现有技术相比,本发明的有益效果是;
21.1、本发明中,通过设置支撑板、推板、驱动气缸、缓冲弹簧、辅助滚轮和橡胶垫的配合使用,便于对抓取的零件进行保护,在机械爪抓取零件运输后,工作人员通过控制面板启动驱动气缸,之后驱动气缸推动推动板带动支撑板移出空腔外侧,之后使支撑板位于机械爪的正下方,从而在零件从机械爪内部脱落时,零件会落到支撑板顶部的橡胶垫上,之后橡胶垫在缓冲弹簧的作用下,对零件下落的惯性进行削弱,此方式操作简单,避免在运输过程中零件掉落地面对其造成损坏,其次通过把支撑板隐藏安装在空腔内部,从而减小装置本体的体积,方便对其进行放置。
22.2、本发明中,通过设置防护罩,便于对机械臂的保护,在使用时,防护罩底端通过第二安装板与固定底座安装,防护罩顶端通过第一安装板与安装块固定,从而防止机械臂在户外长时间工作时,外界空气中的灰尘落入到机械臂表面对其造成腐蚀,同时防护罩是由第一无纺布层和第二无纺布层组成,可以随着机械臂的运动轨迹而调节,方便使用,而且在防护罩的表面设置有拉链,便于对机械臂的维修。
23.3、本发明中,通过设置滑道、螺杆和螺纹套的配合使用,可以使机械臂在装置本体上进行移动,便于扩大机械臂的二次行程,在移动时,工作人员通过控制面板启动步进电机,之后步进电机带动螺杆转动,然后螺纹套通过螺杆的转动带动固定座在装置本体顶部移动,从而改变机械臂在装置本体上的位置,提高机械臂使用的灵活性。
附图说明
24.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍。
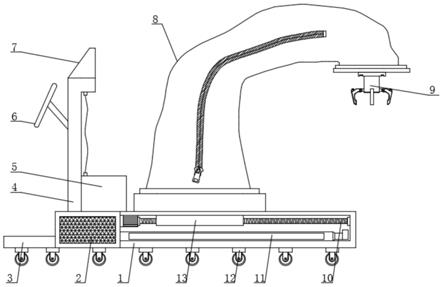
25.图1为本发明提出的一种机械制造用户外移动式抓取装置的结构示意图;
26.图2为本发明提出的一种机械制造用户外移动式抓取装置机械臂示意图;
27.图3为本发明提出的一种机械制造用户外移动式抓取装置支撑板示意图;
28.图4为本发明提出的一种机械制造用户外移动式抓取装置橡胶垫示意图;
29.图5为本发明提出的一种机械制造用户外移动式抓取装置滑道示意图;
30.图6为本发明提出的一种机械制造用户外移动式抓取装置固定底座示意图;
31.图7为本发明提出的一种机械制造用户外移动式抓取装置防护罩正视图;
32.图8为本发明提出的一种机械制造用户外移动式抓取装置防护罩俯视图。
33.图例说明:
34.1、装置本体;2、配重块;3、脚踏板;4、竖板;5、驱动机构;6、方向盘;7、控制面板;8、防护罩;9、机械爪;10、丝杆;11、驱动气缸;12、万向轮;13、螺纹套;14、机械臂;15、旋转云台;16、固定底座;17、空腔;18、支撑板;19、辅助滚轮;20、安装块;21、推动板;22、橡胶垫;
23、滑道;24、缓冲弹簧;25、第一安装板;26、拉链;27、第二安装板;28、第一无纺布层;29、第二无纺布层;30、弹簧杆。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
36.实施例一,参照图1
‑
4,一种机械制造用户外移动式抓取装置,包括装置本体1,所述装置本体1底端开设有空腔17,所述空腔17内部设置有支撑板18,所述支撑板18一端对称设置有推动板21,所述空腔17内部水平安装有驱动气缸11,所述驱动气缸11一端与推动板21固定,所述支撑板18顶部表面竖直设置有缓冲弹簧24,所述缓冲弹簧24顶端设置有橡胶垫22,所述支撑板18底端设置有辅助滚轮19,所述缓冲弹簧24设置有多个,且多个缓冲弹簧24等距离安装在支撑板18与橡胶垫22之间,在机械爪9抓取零件运输后,工作人员通过控制面板7启动驱动气缸11,之后驱动气缸11推动推动板21带动支撑板18移出空腔17外侧,之后使支撑板18位于机械爪9的正下方,从而在零件从机械爪9内部脱落时,零件会落到支撑板18顶部的橡胶垫22上,之后橡胶垫22在缓冲弹簧24的作用下,对零件下落的惯性进行削弱,此方式操作简单,避免在运输过程中零件掉落地面对其造成损坏,其次通过把支撑板18隐藏安装在空腔17内部,从而减小装置本体1的体积,方便对其进行放置。
37.实施例二,参照图1、7和图8,所述装置本体1顶部表面安装有固定底座16,所述固定底座16顶部表面安装有旋转云台15,所述旋转云台15顶部安装有机械臂14,所述机械臂14一端设置有安装块20,所述安装块20底端设置有机械爪9,所述机械臂14外侧表面设置有防护罩8,所述防护罩8顶端通过第一安装板25与安装块20固定连接,所述防护罩8底端通过第二安装板27与固定底座16固定连接,所述防护罩8内部设置有第一无纺布层28和第二无纺布层29,所述第一无纺布层28和第二无纺布层29之间设置有弹簧杆30,所述防护罩8表面设置有拉链26,通过设置防护罩8,便于对机械臂14的保护,在使用时,防护罩8底端通过第二安装板27与固定底座16安装,防护罩8顶端通过第一安装板25与安装块20固定,从而防止机械臂14在户外长时间工作时,外界空气中的灰尘落入到机械臂14表面对其造成腐蚀,同时防护罩8是由第一无纺布层28和第二无纺布层29组成,可以随着机械臂14的运动轨迹而调节,方便使用,而且在防护罩8的表面设置有拉链26,便于对机械臂14的维修。
38.实施例三,参照图1、5和图6,所述固定底座16底端设置有螺纹套13,所述空腔17内部水平安装有螺杆10,所述固定底座16通过螺纹套13与螺杆10螺旋连接,所述螺杆10一端设置有步进电机,通过设置滑道23、螺杆10和螺纹套13的配合使用,可以使机械臂14在装置本体1上进行移动,便于扩大机械臂14的二次行程,在移动时,工作人员通过控制面板7启动步进电机,之后步进电机带动螺杆10转动,然后螺纹套13通过螺杆10的转动带动固定座在装置本体1顶部移动,从而改变机械臂14在装置本体1上的位置,提高机械臂14使用的灵活性。
39.实施例四,参照图1和图5,所述装置本体1顶部表面开设有滑道23,且滑道23开设有两个,并且两个滑道23对称开设在装置本体1顶部表面,通过设置滑道23,便于对螺纹套13的让位。
40.实施例五,参照图1,所述装置本体1一端设置有配重块2,所述配重块2一侧设置有
脚踏板3,所述装置本体1顶部一端竖直安装有竖板4,所述竖板4表面安装有方向盘6,所述竖板4一侧设置有驱动机构5,所述竖板4顶部设置有控制面板7,所述装置本体1底端设置有万向轮12,通过设置控制面板7,便于对装置本体1内部的用电元件进行控制,控制面板7、驱动机构5控制电路通过本领域的技术人员简单的编程即可实现,属于本领域的公知常识,仅对其进行使用,不进行改造,故不再详细描述控制方式和电路连接。
41.工作原理:在机械爪9抓取零件运输后,工作人员通过控制面板7启动驱动气缸11,之后驱动气缸11推动推动板21带动支撑板18移出空腔17外侧,之后使支撑板18位于机械爪9的正下方,从而在零件从机械爪9内部脱落时,零件会落到支撑板18顶部的橡胶垫22上,之后橡胶垫22在缓冲弹簧24的作用下,对零件下落的惯性进行削弱,此方式操作简单,避免在运输过程中零件掉落地面对其造成损坏,其次通过把支撑板18隐藏安装在空腔17内部,从而减小装置本体1的体积,方便对其进行放置,通过设置防护罩8,便于对机械臂14的保护,在使用时,防护罩8底端通过第二安装板27与固定底座16安装,防护罩8顶端通过第一安装板25与安装块20固定,从而防止机械臂14在户外长时间工作时,外界空气中的灰尘落入到机械臂14表面对其造成腐蚀,同时防护罩8是由第一无纺布层28和第二无纺布层29组成,可以随着机械臂14的运动轨迹而调节,方便使用,而且在防护罩8的表面设置有拉链26,便于对机械臂14的维修,通过设置滑道23、螺杆10和螺纹套13的配合使用,可以使机械臂14在装置本体1上进行移动,便于扩大机械臂14的二次行程,在移动时,工作人员通过控制面板7启动步进电机,之后步进电机带动螺杆10转动,然后螺纹套13通过螺杆10的转动带动固定座在装置本体1顶部移动,从而改变机械臂14在装置本体1上的位置,提高机械臂14使用的灵活性。
42.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1