一种流水线用机械自动化抓取装置的制作方法
1.本发明涉及机械自动化抓取装置技术领域,特别涉及一种流水线用机械自动化抓取装置。
背景技术:
2.流水线,又称装配线,工业上的一种生产方式,指每一个生产单位只专注处理某一个片段的工作,以提高工作效率及产量。
3.按照流水线的输送方式大体可以分为:皮带流水装配线、板链线、倍速链、插件线、网带线、悬挂线及滚筒流水线这七类流水线。一般包括牵引件、承载构件、驱动装置、涨紧装置、改向装置和支承件等组成。流水线可扩展性高,可按需求设计输送量,输送速度,装配工位,辅助部件(包括快速接头、风扇、电灯、插座、工艺看板、置物台、24v电源、风批等,因此广受企业欢迎。流水线是人和机器的有效组合,最充分体现设备的灵活性,它将输送系统、随行夹具和在线专机、检测设备有机的组合,以满足多品种产品的输送要求。输送线的传输方式有同步传输的(强制式),也可以是非同步传输(柔性式),根据配置的选择,可以实现装配和输送的要求。输送线在企业的批量生产中不可或缺。
4.现有技术的流水线用机械自动化抓取装置一般都是固定的流水线采用固定的抓取装置,而且抓取距离,抓取的位置都会受到限制,为此我们研发一种智能化全自动且不受位置,不受抓取当放置距离限制的万能机械自动化抓取装置。
技术实现要素:
5.本发明的目的在于提供一种流水线用机械自动化抓取装置,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:一种流水线用机械自动化抓取装置,包括推车板、控制电盒以及用于抓取收水线材料的自动调节抓取设备,在推车板底部的四个拐角处设有移动轮,所述推车板顶端设有用于驱动移动轮的驱动装置;
7.所述自动调节抓取设备设在推车板顶端沿着推车板长度方向的一侧,在推车板顶端远离自动调节抓取设备的一侧设有与与自动调节抓取设备协调配合使用的配重块,其控制电盒设在配重块的顶端;
8.控制电盒的顶端设有蓄电池组,其控制电盒的内部设有中央处理器、存储模块、图像转换器、无线模块以及定位仪,其中蓄电池组与中央处理器电连接,在控制电盒的顶端设有第一无线收发天线,所述无线模块与第一无线收发天线电连接,所述第一无线收发天线无线连接有无线控制器以及总控制室;
9.所述推板车远离自动调节抓取设备的一侧设有控制器。
10.作为本发明优选的方案,所述自动调节抓取设备包括x轴滑轨、y轴滑轨以及z轴滑轨,所述x轴滑轨沿着推板车的宽度方向设置,在x轴滑轨底部两端通过安装块安装在推车板的顶端,在x轴滑轨的一端设有x轴驱动电机,在x轴滑轨上安装有x轴滑块,所述z轴滑轨
底部安装在x轴滑块上,在z轴滑轨的顶端设有z轴驱动电机,在z轴滑轨的上安装有z轴滑块,所述y轴滑轨的一端安装在z轴滑块上,在y轴滑轨上安装有y轴滑块,在y轴滑块的顶端设有y轴驱动电机,在y轴滑块远离y轴滑轨的一侧设有安装板,在安装板的底部设有激光定位仪以及伸缩杆,在伸缩缸的底部设有用于抓取流水线上物件的抓取装置安装架,在y轴滑轨远离z轴滑轨的一侧设有安装杆,在安装杆的底部安装有照明灯以及监控摄像头。
11.作为本发明优选的方案,所述安装块与推车板顶端之间固定连接,所述x轴滑轨与安装块之间通过螺栓固定连接,所述x轴滑轨与x轴驱动电机之间通过螺栓固定,所述x轴滑块与z轴滑轨之间通过螺栓固定,所述z轴滑轨与z轴驱动电机之间通过螺栓固定,所述z轴滑块与y轴滑轨之间通过螺栓固定,所述y轴滑块与y轴驱动电机之间通过螺栓固定,所述安装板与y轴滑块之间通过螺栓固定,所述安装板与伸缩缸以及激光定位仪之间通过螺栓固定,所述安装杆与y轴滑轨之间通过螺栓固定,所述安装杆与照明灯以及监控摄像头之间通过螺栓固定。
12.作为本发明优选的方案,所述控制电盒通过螺栓安装在配重块的顶端,所述控制电盒内设有电路板,其中中央处理器、存储模块、无线模块以及定位仪均安装在电路板上,所述电路板通过螺栓固定在控制电盒内,在控制电盒一侧的侧壁上设有控制开关以及充电接口。
13.作为本发明优选的方案,所述驱动装置包括驱动电机以及驱动箱,其中驱动电机的输出端与驱动箱连接,其驱动电机以及驱动箱与推车板之间通过螺栓固定。
14.作为本发明优选的方案,所述推车板远离自动调节抓取设备的一侧设有支撑杆,其中控制器的背侧通过螺栓安装在支撑杆上,在控制器前侧设有操作显示屏以及操作按钮,在控制器一侧侧壁顶端设有警报器。
15.作为本发明优选的方案,所述无线控制器前侧设有触控屏,在无线控制器的一侧侧壁上设有启动开关,在无线控制器的顶端设有第二无线收发天线,所述无线控制器与中央处理器之间通过第一无线收发天线以及第二无线收发天线无线连接。
16.作为本发明优选的方案,所述第一无线收发天线以及第二无线收发天线之间的无线网络为蓝牙或者nfc。
17.作为本发明优选的方案,所述总控制室与第一无线收发天线之间的无线网路为3g/4g/5g/gprs。
18.作为本发明优选的方案,所述中央处理器分别与存储模块、无线模块、定位仪、图像转换器、充电接口、控制开关、控制器、驱动电机以及自动调节抓取设备内的电元件之间电连接。
19.有益效果:本发明在使用时,首先通过控制器、无线控制器或者总控制室控制该设备即可,在使用时,首先将对应流水线所需要的抓取装置安装在抓取装置安装架上,然后将该机械自动化抓取装置移动至需要加工的流水线房内,通过扫描仪扫描该流水线车间的平面图,然后传送至中央处理器内,中央处理器将其发送至图像转换器进行转换成该机械自动化抓取装置内,然后通过控制器、无线控制器或者总控制室给与其相应的指令,即可对其流水线进行抓取,其通过自动调节抓取设备可实现抓取的上下左右前后调节抓取,通过驱动装置驱动移动轮驱动该机械自动化抓取装置在该流水线车间内按照指令抓取流水线车间内的物件在流水线车间内进行移动,综上所述,本发明实现了该机械自动化抓取装置在
任意的流水线上智能移动抓取,而且不受位置和抓取距离的限制,非常实用。
附图说明
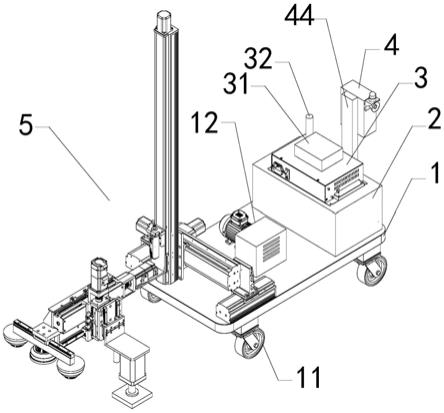
20.图1为本发明一种流水线用机械自动化抓取装置的立体图;
21.图2为本发明一种流水线用机械自动化抓取装置的自动调节抓取设备立体图;
22.图3为本发明一种流水线用机械自动化抓取装置的自动调节抓取设备的局部立体图;
23.图4为本发明一种流水线用机械自动化抓取装置的控制电盒内部立体图;
24.图5为本发明一种流水线用机械自动化抓取装置的电路板立体图;
25.图6为本发明一种流水线用机械自动化抓取装置的驱动转装置立体图;
26.图7为本发明一种流水线用机械自动化抓取装置的无线控制器立体图;
27.图8为本发明一种流水线用机械自动化抓取装置的控制器立体图;
28.图9为本发明一种流水线用机械自动化抓取装置的系统框图。
29.图中:1、推车板;11、移动轮;12、驱动装置;121、驱动电机;122、驱动箱;2、配重块;3、控制电盒;31、蓄电池组;32、第一无线收发天线;33、充电接口;34、控制开关;35、电路板;351、中央处理器;352、存储模块;353、无线模块;354、定位仪;355、图像转换器;4、控制器;41、操作显示屏;42、操作按钮;43、警报器;44、支撑杆;5、自动调节抓取设备;51、x轴滑轨;511、安装块;512、x轴驱动电机;513、x轴滑块;52、z轴滑轨;521、z轴驱动电机;522、z轴滑块;53、y轴滑轨;531、y轴滑块;532、y轴驱动电机;533、安装板;534、激光定位仪;535、伸缩缸;536、抓取装置安装架;54、安装杆;541、监控摄像头;542、照明灯;6、无线控制器;61、触控屏;62、启动开关;63、第二无线收发天线;7、总控制室。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的若干实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容更加透彻全面。
32.需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
33.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
34.请参阅图1
‑
9,本发明提供一种技术方案:一种流水线用机械自动化抓取装置,包
括推车板1、控制电盒3以及用于抓取收水线材料的自动调节抓取设备5,在推车板1底部的四个拐角处设有移动轮11,所述推车板1顶端设有用于驱动移动轮11的驱动装置12;所述自动调节抓取设备5设在推车板1顶端沿着推车板1长度方向的一侧,在推车板1顶端远离自动调节抓取设备5的一侧设有与与自动调节抓取设备5协调配合使用的配重块2,其控制电盒3设在配重块2的顶端;控制电盒3的顶端设有蓄电池组31,其控制电盒3的内部设有中央处理器351、存储模块352、图像转换器355、无线模块353以及定位仪354,其中蓄电池组31与中央处理器351电连接,在控制电盒3的顶端设有第一无线收发天线32,所述无线模块353与第一无线收发天线32电连接,所述第一无线收发天线32无线连接有无线控制器6以及总控制室7;所述推板车1远离自动调节抓取设备5的一侧设有控制器4。
35.实施例,请参照图1、图2以及图3,所述自动调节抓取设备5包括x轴滑轨51、y轴滑轨53以及z轴滑轨52,所述x轴滑轨51沿着推板车1的宽度方向设置,在x轴滑轨51底部两端通过安装块511安装在推车板1的顶端,在x轴滑轨51的一端设有x轴驱动电机512,在x轴滑轨51上安装有x轴滑块513,所述z轴滑轨52底部安装在x轴滑块513上,在z轴滑轨52的顶端设有z轴驱动电机521,在z轴滑轨52的上安装有z轴滑块522,所述y轴滑轨53的一端安装在z轴滑块522上,在y轴滑轨53上安装有y轴滑块531,在y轴滑块531的顶端设有y轴驱动电机532,在y轴滑块531远离y轴滑轨53的一侧设有安装板533,在安装板533的底部设有激光定位仪354以及伸缩杆535,在伸缩缸535的底部设有用于抓取流水线上物件的抓取装置安装架536,在y轴滑轨53远离z轴滑轨52的一侧设有安装杆54,在安装杆54的底部安装有照明灯542以及监控摄像头541,所述安装块511与推车板1顶端之间固定连接,所述x轴滑轨51与安装块511之间通过螺栓固定连接,所述x轴滑轨51与x轴驱动电机512之间通过螺栓固定,所述x轴滑块513与z轴滑轨52之间通过螺栓固定,所述z轴滑轨52与z轴驱动电机521之间通过螺栓固定,所述z轴滑块522与y轴滑轨53之间通过螺栓固定,所述y轴滑块522与y轴驱动电机532之间通过螺栓固定,所述安装板533与y轴滑块531之间通过螺栓固定,所述安装板533与伸缩缸535以及激光定位仪354之间通过螺栓固定,所述安装杆54与y轴滑轨53之间通过螺栓固定,所述安装杆54与照明灯542以及监控摄像头541之间通过螺栓固定,通过设置自动调节抓取设备实现了对流水线五件的自动调节抓取设备。
36.实施例,请参照图1、图4以及图5,所述控制电盒3通过螺栓安装在配重块2的顶端,所述控制电盒3内设有电路板35,其中中央处理器351、存储模块352、无线模块353以及定位仪354均安装在电路板35上,所述电路板35通过螺栓固定在控制电盒3内,在控制电盒3一侧的侧壁上设有控制开关34以及充电接口33。
37.实施例,请参照图1以及图6,所述驱动装置12包括驱动电机121以及驱动箱122,其中驱动电机121的输出端与驱动箱122连接,其驱动电机121以及驱动箱122与推车板1之间通过螺栓固定。
38.实施例,请参照图1以及图8,所述推车板1远离自动调节抓取设备5的一侧设有支撑杆41,其中控制器4的背侧通过螺栓安装在支撑杆41上,在控制器4前侧设有操作显示屏41以及操作按钮42,在控制器4一侧侧壁顶端设有警报器43。
39.实施例,请参照图1以及图7,所述无线控制器6前侧设有触控屏61,在无线控制器6的一侧侧壁上设有启动开关62,在无线控制器6的顶端设有第二无线收发天线63,所述无线控制器6与中央处理器351之间通过第一无线收发天线32以及第二无线收发天线63无线连
接。
40.实施例,请参照图1以及图9,所述第一无线收发天线32以及第二无线收发天线63之间的无线网络为蓝牙或者nfc,所述总控制室7与第一无线收发天线32之间的无线网路为3g/4g/5g/gprs,所述中央处理器351分别与存储模块352、无线模块353、定位仪354、图像转换器355、充电接口33、控制开关34、控制器4、驱动电机121以及自动调节抓取设备5内的电元件之间电连接。
41.工作原理:本发明在使用时,首先通过控制器、无线控制器或者总控制室控制该设备即可,在使用时,首先将对应流水线所需要的抓取装置安装在抓取装置安装架上,然后将该机械自动化抓取装置移动至需要加工的流水线房内,通过扫描仪扫描该流水线车间的平面图,然后传送至中央处理器内,中央处理器将其发送至图像转换器进行转换成该机械自动化抓取装置内,然后通过控制器、无线控制器或者总控制室给与其相应的指令,即可对其流水线进行抓取,其通过自动调节抓取设备可实现抓取的上下左右前后调节抓取,通过驱动装置驱动移动轮驱动该机械自动化抓取装置在该流水线车间内按照指令抓取流水线车间内的物件在流水线车间内进行移动,综上所述,本发明实现了该机械自动化抓取装置在任意的流水线上智能移动抓取,而且不受位置和抓取距离的限制,非常实用。
42.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1