一种提高机器人乘梯效率的方法、系统、电子设备及介质与流程
一种提高机器人乘梯效率的方法、系统、电子设备及介质
1.技术领域
2.本发明涉及一种提高机器人乘梯效率的方法、系统、电子设备及介质,属于机器人技术领域。
背景技术:
3.机器人在进入电梯后,会有一个转身的动作,而当时的逻辑是直到机器人转身成功后,电梯门才关上。但是这种方案有缺陷,如果机器人转身过程中有阻挡的话,会一直失败,这样电梯门就一直关不上,只能等到最长时间自动关闭,使电梯的使用寿命加速到期,容易导致电梯设备损坏。现有技术解决的是进入电梯前的乘梯效率,而且还需要算法识别入梯、出梯人数,比较耗时,导致算法的成本也较高。
技术实现要素:
4.本发明的目的在于,克服现有技术存在的技术缺陷,解决上述技术问题,提出一种提高机器人乘梯效率的方法、系统、电子设备及介质。
5.本发明具体采用如下技术方案:一种提高机器人乘梯效率的方法,由机器人执行,包括如下步骤:到达入梯点具备入梯资格后向电梯发送入梯请求,接收电梯发送的预设点位信息,按照接收的所述预设点位信息执行到达预设点操作后,发送预设点到达通知给电梯,执行机器人转身动作,接收电梯发送的电梯门已开通知,面朝电梯门执行出梯操作完成出梯。
6.作为一种较佳的实施例,所述机器人执行转身动作与所述电梯执行电梯门关闭操作同时进行。
7.本发明还提出一种提高机器人乘梯效率的方法,由电梯执行,包括如下步骤:响应于机器人发送的入梯请求,发送电梯间的预设点位信息给机器人;接收机器人发送的预设点到达通知,执行电梯门关闭操作,并前往目的楼层,到达目的楼层后执行电梯门打开操作,发送电梯门已开通知给机器人。
8.作为一种较佳的实施例,所述机器人执行转身动作与所述电梯执行电梯门关闭操作同时进行。
9.本发明还提出一种提高机器人乘梯效率的方法,包括如下步骤:步骤ss1:机器人到达入梯点具备入梯资格后向电梯发送入梯请求,电梯接收机器人发送的入梯请求,发送电梯间的预设点位信息给机器人;步骤ss2:机器人接收电梯发送的预设点位信息,按照接收的所述预设点位信息执行到达预设点操作后,发送预设点到达通知给电梯;步骤ss3:电梯接收机器人发送的预设点到达通知,执行电梯门关闭操作,并前往
目的楼层,机器人执行机器人转身动作,电梯到达目的楼层后执行电梯门打开操作,电梯发送电梯门已开通知给机器人;步骤ss4:机器人接收电梯发送的电梯门已开通知,机器人面朝电梯门执行出梯操作完成出梯。
10.作为一种较佳的实施例,所述机器人执行转身动作与所述电梯执行电梯门关闭操作同时进行。
11.本发明还提出一种提高机器人乘梯效率的系统,包括:机器人,具体执行:到达入梯点具备入梯资格后向电梯发送入梯请求,接收电梯发送的预设点位信息,按照接收的所述预设点位信息执行到达预设点操作后,发送预设点到达通知给电梯,执行机器人转身动作,接收电梯发送的电梯门已开通知,面朝电梯门执行出梯操作完成出梯;电梯执行,具体执行:响应于机器人发送的入梯请求,发送电梯间的预设点位信息给机器人;接收机器人发送的预设点到达通知,执行电梯门关闭操作,并前往目的楼层,到达目的楼层后执行电梯门打开操作,发送电梯门已开通知给机器人。
12.作为一种较佳的实施例,所述机器人执行转身动作与所述电梯执行电梯门关闭操作同时进行。
13.本发明还提出电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现所述方法的步骤。
14.本发明还提出介质,其上存储有计算机程序,该计算机程序被处理器执行时实现所述方法的步骤。
15.本发明所达到的有益效果:本发明针对如何解决如果机器人转身过程中有阻挡的话,会一直失败,这样电梯门就一直关不上,只能等到最长时间自动关闭,使电梯的使用寿命加速到期,容易导致电梯设备损坏,而现有技术解决的是进入电梯前的乘梯效率,而且还需要算法识别入梯、出梯人数,比较耗时,导致算法的成本也较高的技术需求,通过机器人到达入梯点具备入梯资格后向电梯发送入梯请求,电梯接收机器人发送的入梯请求,发送电梯间的预设点位信息给机器人;机器人接收电梯发送的预设点位信息,按照接收的所述预设点位信息执行到达预设点操作后,发送预设点到达通知给电梯;电梯接收机器人发送的预设点到达通知,执行电梯门关闭操作,并前往目的楼层,机器人执行机器人转身动作,电梯到达目的楼层后执行电梯门打开操作,电梯发送电梯门已开通知给机器人;机器人接收电梯发送的电梯门已开通知,机器人面朝电梯门执行出梯操作完成出梯,实现不用在机器人转身成功后才关电梯门,不用在到达目的楼层后,电梯门开才转身,机器人实现的异步操作,电梯和机器人的转身动作互不影响,提高了机器人的乘梯效率,节省时间,节约算法成本,从整体上解决如果机器人转身过程中有阻挡的话,会一直失败,这样电梯门就一直关不上,只能等到最长时间自动关闭,使电梯的使用寿命加速到期,容易导致电梯设备损坏,而现有技术解决的是进入电梯前的乘梯效率,而且还需要算法识别入梯、出梯人数,比较耗时,导致算法的成本也较高的技术需求。
附图说明
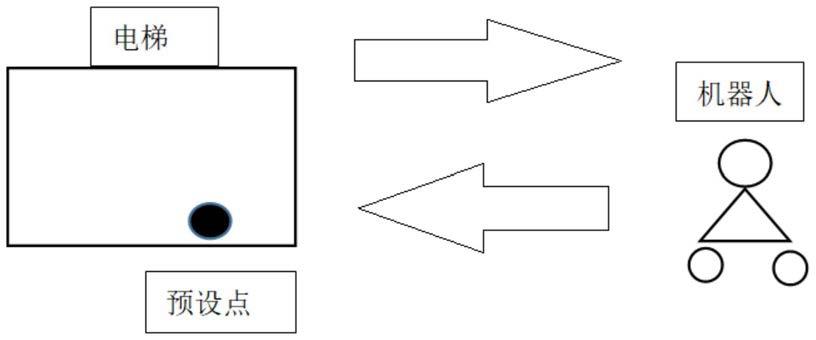
16.图1是本发明的一种提高机器人乘梯效率的系统的拓扑示意图。
17.图2是本发明的一种提高机器人乘梯效率的方法的流程示意图。
具体实施方式
18.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
19.实施例1:本发明提出一种提高机器人乘梯效率的方法,由机器人执行,包括如下步骤:到达入梯点具备入梯资格后向电梯发送入梯请求,接收电梯发送的预设点位信息,按照接收的所述预设点位信息执行到达预设点操作后,发送预设点到达通知给电梯,执行机器人转身180度动作,接收电梯发送的电梯门已开通知,面朝电梯门执行出梯操作完成出梯。
20.作为一种较佳的实施例,所述机器人执行转身动作与所述电梯执行电梯门关闭操作同时进行。
21.实施例2:本发明还提出一种提高机器人乘梯效率的方法,由电梯执行,包括如下步骤:响应于机器人发送的入梯请求,发送电梯间的预设点位信息给机器人;接收机器人发送的预设点到达通知,执行电梯门关闭操作,并前往目的楼层,到达目的楼层后执行电梯门打开操作,发送电梯门已开通知给机器人。
22.作为一种较佳的实施例,所述机器人执行转身动作与所述电梯执行电梯门关闭操作同时进行。
23.实施例3:如图2所示,本发明还提出一种提高机器人乘梯效率的方法,包括如下步骤:步骤ss1:机器人到达入梯点具备入梯资格后向电梯发送入梯请求,电梯接收机器人发送的入梯请求,发送电梯间的预设点位信息给机器人;步骤ss2:机器人接收电梯发送的预设点位信息,按照接收的所述预设点位信息执行到达预设点操作后,发送预设点到达通知给电梯;步骤ss3:电梯接收机器人发送的预设点到达通知,执行电梯门关闭操作,并前往目的楼层,机器人执行机器人转身180度动作,电梯到达目的楼层后执行电梯门打开操作,电梯发送电梯门已开通知给机器人;步骤ss4:机器人接收电梯发送的电梯门已开通知,机器人面朝电梯门执行出梯操作完成出梯。
24.作为一种较佳的实施例,所述机器人执行转身动作与所述电梯执行电梯门关闭操作同时进行。
25.实施例4:如图1所示,本发明还提出一种提高机器人乘梯效率的系统,包括:机器人,具体执行:到达入梯点具备入梯资格后向电梯发送入梯请求,接收电梯发送的预设点位信息,按照接收的所述预设点位信息执行到达预设点操作后,发送预设点到达通知给电梯,执行机器人转身动作,接收电梯发送的电梯门已开通知,面朝电梯门执行出梯操作完成出梯;电梯执行,具体执行:响应于机器人发送的入梯请求,发送电梯间的预设点位信息给机器人;接收机器人发送的预设点到达通知,执行电梯门关闭操作,并前往目的楼层,到达目的楼层后执行电梯门打开操作,发送电梯门已开通知给机器人。
26.作为一种较佳的实施例,所述机器人执行转身180度动作与所述电梯执行电梯门关闭操作同时进行。
27.实施例5:本发明还提出电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现所述方法的步骤。
28.实施例6:本发明还提出介质,其上存储有计算机程序,该计算机程序被处理器执行时实现所述方法的步骤。
29.本发明针对如何解决如果机器人转身过程中有阻挡的话,会一直失败,这样电梯门就一直关不上,只能等到最长时间自动关闭,使电梯的使用寿命加速到期,容易导致电梯设备损坏,而现有技术解决的是进入电梯前的乘梯效率,而且还需要算法识别入梯、出梯人数,比较耗时,导致算法的成本也较高的技术需求,通过机器人到达入梯点具备入梯资格后向电梯发送入梯请求,电梯接收机器人发送的入梯请求,发送电梯间的预设点位信息给机器人;机器人接收电梯发送的预设点位信息,按照接收的所述预设点位信息执行到达预设点操作后,发送预设点到达通知给电梯;电梯接收机器人发送的预设点到达通知,执行电梯门关闭操作,并前往目的楼层,机器人执行机器人转身动作,电梯到达目的楼层后执行电梯门打开操作,电梯发送电梯门已开通知给机器人;机器人接收电梯发送的电梯门已开通知,机器人面朝电梯门执行出梯操作完成出梯,实现不用在机器人转身成功后才关电梯门,不用在到达目的楼层后,电梯门开才转身,机器人实现的异步操作,电梯和机器人的转身动作互不影响,提高了机器人的乘梯效率,节省时间,节约算法成本,从整体上解决如果机器人转身过程中有阻挡的话,会一直失败,这样电梯门就一直关不上,只能等到最长时间自动关闭,使电梯的使用寿命加速到期,容易导致电梯设备损坏,而现有技术解决的是梯前的乘梯效率,而且还需要算法识别入梯、出梯人数,比较耗时,导致算法的成本也较高的技术需求。
30.需要说明的是:本发明也可以采用机器人到达电梯内部的预设点之后,不动,电梯去往目的楼层,电梯到达目的楼层后,电梯门开,机器人倒着出来,不需要自转180度。
31.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1