一种物流网衣物快速包装的智能包装设备的制作方法
1.本发明涉及一种智能包装设备,尤其涉及一种物流网衣物快速包装的智能包装设备。
背景技术:
2.在物流运输前,需要对物品进行包装作业,使货物在生产流通过程中方便运输,容易存储。
3.现有的可参考授权公告号为cn201021352y的中国发明专利,其公开了一种具有弧形弹性板的衣物包装机,其技术要点包括包装机箱体及包装薄膜绷紧装置、包装薄膜切断装置和包装薄膜热粘合装置,包装薄膜绷紧装置由弧形弹性板构成;包装薄膜绷紧装置包括下弹性板、上弹性板、耐温海绵、加热丝、夹板;切断装置包括刀片和手动横梁;薄膜套在待包装衣物上,衣物挂在挂衣架。在使用时,把带衣架的衣物挂在挂衣架上,下拉包装薄膜,将衣物罩起来。向下拉手动横梁,夹板连同耐温海绵向内压,耐温海绵与加热丝夹紧包装薄膜。同时,下弹性板和上弹性板也夹紧包装薄膜。继续下拉手动横梁,刀片伸出来切断包装薄膜,当加热丝通电时间达到设定时间后,加热丝完成包装薄膜的热粘合,整个包装过程完成。
4.这种包装机虽然能够对衣物进行包装,但是需要依靠人工操作,包装较为缓慢,当需要大量包装时,较为费力,导致劳动强度大,工作效率低的问题,因此,鉴于上述问题提供一种能够快速包装,提高工作效率和自动化程度高的物流网衣物快速包装的智能包装设备。
技术实现要素:
5.为了克服依靠人工操作,包装较为缓慢,当需要大量包装时,较为费力,导致劳动强度大,工作效率低的缺点,本发明的目的是提供一种能够快速包装,提高工作效率和自动化程度高的物流网衣物快速包装的智能包装设备。
6.技术方案为:一种物流网衣物快速包装的智能包装设备,包括有外框、第一固定板、第一转杆、第一滑板、第二固定板、加热板、温度传感器、扭力弹簧、送料切割机构、夹料机构、封口机构和换料机构,外框顶部左侧设有第一固定板,第一固定板上转动式设有第一转杆,第一转杆右侧放置有第一滑板,外框内底部后侧设有第二固定板,第二固定板后侧转动式设有加热板,加热板前侧设有温度传感器,加热板与第二固定板之间连接有两个扭力弹簧,外框内上部设有送料切割机构,外框内部前侧设有夹料机构,外框内部左后侧设有封口机构,外框内中部设有换料机构。
7.作为上述方案的改进,送料切割机构包括有第一电动推杆、第一推板、刀片、第一距离传感器、第一减速电机、转轴和平皮带,外框前侧设有第一电动推杆,第一电动推杆伸缩杆后侧设有第一推板,外框内上部设有刀片,外框内中部右侧设有第一距离传感器,外框内部右前侧设有第一减速电机,外框前侧中部左右对称转动式设有转轴,右侧的转轴前侧
与第一减速电机输出轴通过联轴器连接,转轴之间通过皮带轮绕有位于第一推板下方的平皮带。
8.作为上述方案的改进,夹料机构包括有第三固定板、第二电动推杆、第一夹板、第二夹板和第二距离传感器,外框内部前侧设有位于平皮带下方的第三固定板,第三固定板底部设有第二电动推杆,第二电动推杆伸缩杆后侧设有第一夹板,第二固定板底部前侧设有第二夹板,第一夹板前侧中间设有第二距离传感器。
9.作为上述方案的改进,封口机构包括有第二减速电机、第一绕线轮、第四固定板、第二转杆、第一拉绳、托板和光电传感器,外框内左壁上部后侧设有第二减速电机,第二减速电机输出轴右侧设有第一绕线轮,加热板上部设有两个第四固定板,第四固定板之间转动式设有第二转杆,第二转杆与第一绕线轮之间连接有第一拉绳,第二固定板上放置有托板,托板中间设有光电传感器。
10.作为上述方案的改进,换料机构包括有固定杆、第二滑板、第一弹簧、第三减速电机、第二绕线轮、滑轮、第二拉绳、第三滑板、第二弹簧和第三电动推杆,外框内底部左右对称设有固定杆,固定杆之间滑动式设有第二滑板,第二滑板底部与固定杆之间均连接有第一弹簧,外框内底部左侧设有第三减速电机,第三减速电机输出轴上设有第二绕线轮,外框内底部左侧设有位于第三减速电机左前侧的滑轮,第二绕线轮与第二滑板之间连接有绕在滑轮上的第二拉绳,第二滑板后侧滑动式设有第三滑板,第三滑板后侧与第二滑板后侧之间左右对称连接有第二弹簧,第二滑板右侧设有与第三滑板接触的第三电动推杆。
11.作为上述方案的改进,还包括有出料机构,出料机构包括有第四电动推杆、第二推板、滑杆和第三弹簧,外框内右壁下部后侧设有第四电动推杆,第四电动推杆伸缩杆上设有第二推板,第二推板右前侧滑动式设有与托板连接的滑杆,托板与第二推板之间连接有套在滑杆上的第三弹簧。
12.作为上述方案的改进,还包括有限料机构,限料机构包括有第五固定板、第三转杆、第五电动推杆、压力传感器、压板和第四弹簧,外框左侧设有两个第五固定板,第五固定板上部之间均匀间隔转动式连接有多个第三转杆,外框上部内左壁设有第五电动推杆,第五电动推杆下侧设有压力传感器,第五电动推杆伸缩杆底部远离压力传感器的一侧设有压板,压板与压力传感器之间连接有第四弹簧。
13.作为上述方案的改进,还包括有控制箱,外框左前侧设有控制箱,控制箱内安装有开关电源、电源模块和控制模块,开关电源为整个物流网衣物快速包装的智能包装设备供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,电源模块与控制模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;第一距离传感器、第二距离传感器、温度传感器、压力传感器和光电传感器都与控制模块通过电性连接;第一电动推杆、第二电动推杆、第三电动推杆、第四电动推杆、第五电动推杆和加热板都与控制模块通过继电器控制模块连接;第一减速电机、第二减速电机和第三减速电机都与控制模块通过直流电机正反转模块连接。
14.本发明具有以下优点:1、第二滑板带动第三滑板向下移动,进而向下拉长塑料膜,使得塑料膜留出的一端位于第一夹板与第二夹板之间,如此无需人们手动向下拉长塑料膜,进而减少人工操作的麻烦;
15.2、第二推板带动滑杆向左移动,进而带动托板向左移动,将托板从外框的取料口
推出,进而方便人们取出包装好的衣物,避免加热板的温度还未降下来,人们就伸进外框的取料口触碰到加热板,导致烫伤;
16.3、压板向下移动与衣物接触,进而将衣物固定在第三转杆上,避免多个衣物向右滑至堆积在平皮带上。
附图说明
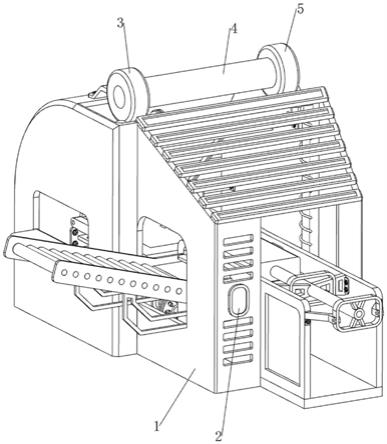
17.图1为本发明的立体结构示意图。
18.图2为本发明的第一种部分立体结构示意图。
19.图3为本发明的第二种部分立体结构示意图。
20.图4为本发明的送料切割机构第一种部分立体结构示意图。
21.图5为本发明的送料切割机构第二种部分立体结构示意图。
22.图6为本发明的送料切割机构第三种部分立体结构示意图。
23.图7为本发明的夹料机构第一种部分立体结构示意图。
24.图8为本发明的夹料机构第二种部分立体结构示意图。
25.图9为本发明的夹料机构第三种部分立体结构示意图。
26.图10为本发明的封口机构立体结构示意图。
27.图11为本发明的换料机构第一种部分立体结构示意图。
28.图12为本发明的换料机构第二种部分立体结构示意图。
29.图13为本发明的a处放大立体结构示意图。
30.图14为本发明的出料机构立体结构示意图。
31.图15为本发明的b处放大立体结构示意图。
32.图16为本发明的限料机构第一种部分立体结构示意图。
33.图17为本发明的限料机构第二种部分立体结构示意图。
34.图18为本发明的c处放大立体结构示意图。
35.图19为本发明的电路框图。
36.图20为本发明的电路原理图。
37.图中标号名称:1
‑
外框,2
‑
控制箱,3
‑
第一固定板,4
‑
第一转杆,5
‑
第一滑板,6
‑
第二固定板,7
‑
加热板,71
‑
温度传感器,8
‑
扭力弹簧,9
‑
送料切割机构,91
‑
第一电动推杆,92
‑
第一推板,93
‑
刀片,94
‑
第一距离传感器,95
‑
第一减速电机,96
‑
转轴,97
‑
平皮带,10
‑
夹料机构,101
‑
第三固定板,102
‑
第二电动推杆,103
‑
第一夹板,104
‑
第二夹板,105
‑
第二距离传感器,11
‑
封口机构,111
‑
第二减速电机,112
‑
第一绕线轮,113
‑
第四固定板,114
‑
第二转杆,115
‑
第一拉绳,116
‑
托板,117
‑
光电传感器,12
‑
换料机构,121
‑
固定杆,122
‑
第二滑板,123
‑
第一弹簧,124
‑
第三减速电机,125
‑
第二绕线轮,126
‑
滑轮,127
‑
第二拉绳,128
‑
第三滑板,1281
‑
第二弹簧,1282
‑
第三电动推杆,13
‑
出料机构,131
‑
第四电动推杆,132
‑
第二推板,133
‑
滑杆,134
‑
第三弹簧,14
‑
限料机构,141
‑
第五固定板,142
‑
第三转杆,143
‑
第五电动推杆,144
‑
压力传感器,145
‑
压板,146
‑
第四弹簧。
具体实施方式
38.以下结合具体实施例对上述方案做进一步说明。应理解,这些实施例是用于说明
本技术而不限于限制本技术的范围。实施例中采用的实施条件可以根据具体厂家的条件做进一步调整,未注明的实施条件通常为常规实验中的条件。
39.实施例1
40.一种物流网衣物快速包装的智能包装设备,如图1
‑
20所示,包括有外框1、第一固定板3、第一转杆4、第一滑板5、第二固定板6、加热板7、温度传感器71、扭力弹簧8、送料切割机构9、夹料机构10、封口机构11和换料机构12,外框1左前侧开有进料口,外框1左后侧开有取料口,外框1顶部左侧设有第一固定板3,第一固定板3上转动式设有第一转杆4,第一转杆4右侧放置有第一滑板5,外框1内底部后侧设有第二固定板6,第二固定板6后侧转动式设有加热板7,加热板7前侧设有温度传感器71,加热板7与第二固定板6之间连接有两个扭力弹簧8,外框1内上部设有送料切割机构9,外框1内部前侧设有夹料机构10,外框1内部左后侧设有封口机构11,外框1内中部设有换料机构12。
41.送料切割机构9包括有第一电动推杆91、第一推板92、刀片93、第一距离传感器94、第一减速电机95、转轴96和平皮带97,外框1前侧设有第一电动推杆91,第一电动推杆91伸缩杆后侧设有第一推板92,外框1内上部设有刀片93,外框1内中部右侧设有第一距离传感器94,外框1内部右前侧设有第一减速电机95,外框1前侧中部左右对称转动式设有转轴96,右侧的转轴96前侧与第一减速电机95输出轴通过联轴器连接,转轴96之间通过皮带轮绕有平皮带97,平皮带97位于第一推板92下方。
42.夹料机构10包括有第三固定板101、第二电动推杆102、第一夹板103、第二夹板104和第二距离传感器105,外框1内部前侧设有第三固定板101,第三固定板101位于平皮带97下方,第三固定板101底部设有第二电动推杆102,第二电动推杆102伸缩杆后侧设有第一夹板103,第二固定板6底部前侧设有第二夹板104,第一夹板103前侧中间设有第二距离传感器105。
43.封口机构11包括有第二减速电机111、第一绕线轮112、第四固定板113、第二转杆114、第一拉绳115、托板116和光电传感器117,外框1内左壁上部后侧设有第二减速电机111,第二减速电机111输出轴右侧设有第一绕线轮112,加热板7上部设有两个第四固定板113,第四固定板113之间转动式设有第二转杆114,第二转杆114与第一绕线轮112之间连接有第一拉绳115,第二固定板6上放置有托板116,托板116中间设有光电传感器117。
44.换料机构12包括有固定杆121、第二滑板122、第一弹簧123、第三减速电机124、第二绕线轮125、滑轮126、第二拉绳127、第三滑板128、第二弹簧1281和第三电动推杆1282,外框1内底部左右对称设有固定杆121,固定杆121之间滑动式设有第二滑板122,第二滑板122底部与固定杆121之间均连接有第一弹簧123,外框1内底部左侧设有第三减速电机124,第三减速电机124输出轴上设有第二绕线轮125,外框1内底部左侧设有滑轮126,滑轮126位于第三减速电机124左前侧,第二绕线轮125与第二滑板122之间连接有第二拉绳127,第二拉绳127绕在滑轮126上,第二滑板122后侧滑动式设有第三滑板128,第三滑板128后侧与第二滑板122后侧之间左右对称连接有第二弹簧1281,第二滑板122右侧设有第三电动推杆1282,第三电动推杆1282伸缩杆前侧与第三滑板128接触。
45.使用本设备时,首先按下电源总开关将本设备上电,控制模块控制第一减速电机95启动,第一减速电机95输出轴带动右侧的转轴96转动,进而通过皮带轮和平皮带97带动左侧的转轴96转动,取下第一滑板5,将塑料膜绕在第一转杆4上,随后复位第一滑板5,将塑
料膜留出的一端穿过第二滑板122与第三滑板128之间,向下拉动塑料膜,使得塑料膜留出的一端位于第一夹板103与第二夹板104之间,此时第二距离传感器105检测到与塑料膜之间的距离达到预设值,控制模块控制第二电动推杆102伸缩杆伸长1秒后停止,第二电动推杆102伸缩杆伸长带动第一夹板103向后移动与塑料膜接触,进而夹紧塑料膜,随后人们将叠好的衣物从外框1的进料口放在平皮带97上,平皮带97转动将衣物运输至第一推板92下方,此时衣物靠近第一距离传感器94,第一距离传感器94检测到与衣物之间的距离达到预设值,控制模块控制第一减速电机95关闭,同时控制模块还会控制第一电动推杆91伸缩杆伸长3秒再收缩3秒后关闭,第一电动推杆91伸缩杆伸长带动第一推板92向后移动,当第一推板92向后移动与塑料膜接触时,进而带动塑料膜拉长折弯,刀片93将塑料膜截断,塑料膜上半部分盖住第一推板92,同时第一推板92带动衣物向后移动至托板116上,3秒后,第一电动推杆91伸缩杆收缩带动第一推板92向前移动复位,塑料膜上半部分与第一推板92分离进而盖住衣物,同时衣物向后移动至托板116上进而盖住光电传感器117,光电传感器117检测到光线较暗达到预设值,控制模块控制第二电动推杆102伸缩杆收缩1秒后关闭,控制模块还会控制加热板7启动,控制模块还会控制第二减速电机111输出轴转动2秒后停止,第二减速电机111输出轴转动带动第一绕线轮112转动,第一拉绳115被放松,使得初始状态形变的扭力弹簧8复位,进而带动加热板7转动与塑料膜接触,使得加热板7对塑料膜加热封口,进而将衣物包裹在塑料膜内进行包装,控制模块还会控制第三电动推杆1282伸缩杆伸长1秒后停止,第三电动推杆1282伸缩杆伸长带动第三滑板128向前移动,第二弹簧1281拉伸,进而将塑料膜夹住,同时控制模块还会控制第三减速电机124输出轴转动十圈后停止,第三减速电机124输出轴转动带动第二绕线轮125转动,进而通过第二拉绳127带动第二滑板122向下移动,第一弹簧123被压缩,第二滑板122带动第三滑板128向下移动,进而向下拉长塑料膜,使得塑料膜留出的一端位于第一夹板103与第二夹板104之间,如此无需人们手动向下拉长塑料膜,进而减少人工操作的麻烦;当第二距离传感器105检测到与塑料膜之间的距离达到预设值时,控制模块还会控制第三电动推杆1282伸缩杆收缩1秒后关闭,第三电动推杆1282伸缩杆收缩与第三滑板128分离,进而在第二弹簧1281复位的作用下带动第三滑板128向后移动复位,同时控制模块还会控制第三减速电机124输出轴反转10圈后关闭,第三减速电机124输出轴反转带动第二绕线轮125反转,第二拉绳127被放松,进而在第一弹簧123复位的作用下带动第二滑板122和第三滑板128向上移动复位;当温度传感器71检测到加热板7的温度达到预设值,控制模块会控制加热板7关闭,控制模块还会控制第二减速电机111输出轴反转2秒后关闭,第二减速电机111输出轴反转带动第一绕线轮112反转,进而通过第一拉绳115带动第二转杆114、第四固定板113和加热板7反转复位,扭力弹簧8形变;包装完毕后,取出包装好的衣物,光电传感器117检测到光线变亮达到预设值,控制模块进而控制第一减速电机95启动,重复上述操作即可进行大量生产,不需要使用本设备时,按下电源总开关将本设备断电即可。
46.还包括有出料机构13,出料机构13包括有第四电动推杆131、第二推板132、滑杆133和第三弹簧134,外框1内右壁下部后侧设有第四电动推杆131,第四电动推杆131伸缩杆上设有第二推板132,第二推板132右前侧滑动式设有滑杆133,滑杆133底部与托板116连接,托板116与第二推板132之间连接有第三弹簧134,第三弹簧134套在滑杆133上。
47.当温度传感器71检测到加热板7的温度达到预设值时,控制模块还会控制第四电
动推杆131伸缩杆伸长2秒后停止,第四电动推杆131伸缩杆伸长带动第二推板132向左移动,第二推板132带动滑杆133向左移动,进而带动托板116向左移动,托板116被向上挤压,第三弹簧134被压缩,进而将托板116从外框1的取料口推出,进而方便人们取出包装好的衣物,避免加热板7的温度还未降下来,人们就伸进外框1的取料口触碰到加热板7,导致烫伤,当光电传感器117检测到光线变亮达到预设值时,控制模块进而控制第四电动推杆131伸缩杆收缩2秒后关闭,第四电动推杆131伸缩杆收缩带动第二推板132向右移动,第二推板132带动滑杆133向右移动,进而带动托板116向右移动复位,进而在第三弹簧134复位的作用下带动托板116复位。
48.还包括有限料机构14,限料机构14包括有第五固定板141、第三转杆142、第五电动推杆143、压力传感器144、压板145和第四弹簧146,外框1左侧设有两个第五固定板141,第五固定板141上部之间均匀间隔转动式连接有多个第三转杆142,外框1上部内左壁设有第五电动推杆143,第五电动推杆143下侧设有压力传感器144,第五电动推杆143伸缩杆底部设有压板145,压板145与压力传感器144之间连接有第四弹簧146。
49.人们将叠好的衣物放在第三转杆142上,使得叠好的衣物向右滑动至平皮带97上,当第一距离传感器94检测到与衣物之间的距离达到预设值,控制模块控制第五电动推杆143伸缩杆伸长,第五电动推杆143伸缩杆带动压力传感器144、压板145和第四弹簧146向下移动,当压板145与衣物接触时,将衣物固定在第三转杆142上,避免多个衣物向右滑至堆积在平皮带97上,第四弹簧146被压缩,进而在第四弹簧146的作用下挤压压力传感器144,压力传感器144检测到压力达到预设值,控制模块控制第五电动推杆143伸缩杆停止伸长,当光电传感器117检测到光线变亮达到预设值时,控制模块控制第五电动推杆143伸缩杆收缩复位,进而带动压力传感器144、压板145和第四弹簧146向上移动复位。
50.还包括有控制箱2,外框1左前侧设有控制箱2,控制箱2内安装有开关电源、电源模块和控制模块,开关电源为整个物流网衣物快速包装的智能包装设备供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,电源模块与控制模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;第一距离传感器94、第二距离传感器105、温度传感器71、压力传感器144和光电传感器117都与控制模块通过电性连接;第一电动推杆91、第二电动推杆102、第三电动推杆1282、第四电动推杆131、第五电动推杆143和加热板7都与控制模块通过继电器控制模块连接;第一减速电机95、第二减速电机111和第三减速电机124都与控制模块通过直流电机正反转模块连接。
51.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1