一种应用于自动化立体仓库的卡车纵梁双向翻转机的制作方法
1.本发明涉及车辆制造技术领域,尤其涉及一种应用于自动化立体仓库的卡车纵梁双向翻转机。
背景技术:
2.近年来,随着国家的稳步发展,人民的生活水平不断提高。现阶段,快递物流行业发展迅猛,卡车作为运输环节中重要的一环,其需求量呈逐年增长态势。卡车生产环节中,纵梁作为卡车的基本受力构件,对卡车的整体结构具有非常重要的作用。卡车纵梁的压合工序需要翻转纵梁,目前来看,翻转是影响整条生产线质量和效率的瓶颈工位。翻转过程中,现有的装置会对卡车纵梁产生很强烈的碰撞,往往会造成纵梁的表面损伤影响后面的工序,严重的会对纵梁的结构造成破坏。同时,现有的翻转装置也存在安全隐患和噪声污染的问题。
3.在专利cn102825492a中提出了
‘
用于车架纵梁的翻转装置和系统’,包括机架、支撑部件、驱动气缸、枢转部件、阻挡件等。但是,存在如下缺点:1、虽然可以双向翻转,但是只能翻转90
°
,不能实现压合工序所需要的纵梁180
°
翻转;2、阻挡件虽然具备夹抱功能,但是不具备自动调距功能,在面对纵梁宽度200-360mm、翼面高度60-110mm等不确定规格时,需要人工实时调整,无法纳入自动化生产线中,影响生产效率。
4.在专利cn207917926u中提出了
‘
一种钢板翻转机’,包括电机、减速机、支座、支撑轴、连杆机构和翻转机构等。但是,存在如下缺点:1、这种翻转装置虽然翻转轨迹精确平稳,但是受运动轨迹的制约,整体的占用面积大,对车间设备的摆放是一个挑战,不利于集约化的发展思想;2、由于两侧翻板臂的尺寸固定,导致翻转过程中夹抱尺寸受限,从而影响纵梁翻转稳定性;3、受结构和运动轨迹的限制,导致这种翻转装置只能单向180
°
翻转,不具备往复翻转的能力。
技术实现要素:
5.有鉴于此,本发明提出一种应用于自动化立体仓库的卡车纵梁双向翻转机,提供一种制作简便、提高工作效率、能够实现双向翻转、运动平缓稳定、能减轻和避免对纵梁表面碰撞和破坏的卡车纵梁翻转机。
6.为实现上述目的,本发明提供一种应用于自动化立体仓库的卡车纵梁双向翻转机,包括机架、电机支架、第一翻转动力传动机构、第一翻转机构、第二翻转动力传动机构、第二翻转机构、夹抱动力传动机构和旋转弹性夹抱机构;第一翻转动力传动机构、第一翻转机构、第二翻转动力传动机构、第二翻转机构安装在所述机架上;所述第一翻转动力传动机构包括第一翻转电机、第一传动轴;所述第二翻转动力传动机构包括第二翻转电机、第二传动轴;所述第一翻转机构包括第一曲轴、第一连杆、第一翻转轴、第一翻转臂,所述第一
曲轴与所述第一传动轴相连,所述第一连杆的两端分别与所述第一曲轴和所述第一翻转臂铰接相连,所述第一翻转臂固定在所述第一翻转轴上,由所述第一传动轴在所述第一曲轴和所述第一连杆的传动下驱动所述第一翻转臂绕所述第一翻转轴转动;所述第二翻转机构包括第二曲轴、第二连杆、第二翻转轴、第二翻转臂,所述第二曲轴与所述第二传动轴相连,所述第二连杆的两端分别与所述第二曲轴和所述第二翻转臂铰接相连,所述第二翻转臂固定在所述第二翻转轴上,由所述第二传动轴在所述第二曲轴和所述第二连杆的传动下驱动所述第二翻转臂绕所述第二翻转轴转动;所述夹抱动力传动机构包括伺服电机、弹性联轴器、扭矩传感器、小齿轮和大齿轮,所述伺服电机与所述小齿轮相连,所述小齿轮与所述大齿轮相啮合,由所述伺服电机驱动所述小齿轮转动并带动所述大齿轮转动,所述大齿轮分别铰接在所述第一翻转轴和所述第二翻转轴上;所述旋转弹性夹抱机构包括旋转盘、固定夹抱臂、活动夹抱臂、弹簧,所述旋转盘固定在所述大齿轮上,所述固定夹抱臂固定在所述旋转盘上,所述活动夹抱臂连接在所述旋转盘上,所述固定夹抱臂和所述活动夹抱臂相连接。
7.进一步地,所述第一传动轴和所述第二传动轴分别通过轴承座固定在所述机架上。
8.进一步地,所述伺服电机安装在所述电机支架上,所述扭矩传感器安装在所述电机支架上并通过所述弹性联轴器与所述伺服电机相连接。
9.进一步地,所述大齿轮通过深沟球轴承铰接在所述第一翻转轴和所述第二翻转轴上。
10.进一步地,在所述固定夹抱臂和所述活动夹抱臂中间设置有所述弹簧。
11.与相关技术相比,本发明提出的一种应用于自动化立体仓库的卡车纵梁双向翻转机,能够实现卡车纵梁的往复翻转,既可以为下一道压合工序服务,也可以反向翻转进行检查,更进一步可以实现反向入库等动作。同时,采用全自动化控制系统,无需人工干预,能够提高生产效率,节约生产成本。
附图说明
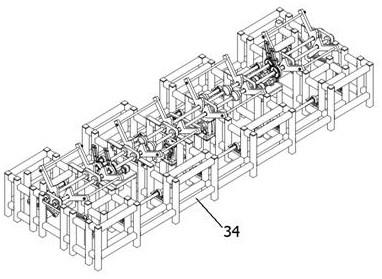
12.下面结合附图和具体实施方式对本发明作进一步详细的说明。图1-1为本发明一种应用于自动化立体仓库的卡车纵梁双向翻转机的运动原理示意图;图1-2为本发明一种应用于自动化立体仓库的卡车纵梁双向翻转机的运动原理示意图;图1-3为本发明一种应用于自动化立体仓库的卡车纵梁双向翻转机的运动原理示意图;图2为本发明一种应用于自动化立体仓库的卡车纵梁双向翻转机的结构示意图;图3为本发明一种应用于自动化立体仓库的卡车纵梁双向翻转机的结构示意图;图4为本发明一种应用于自动化立体仓库的卡车纵梁双向翻转机的结构示意图;图5为本发明一种应用于自动化立体仓库的卡车纵梁双向翻转机的结构示意图。
13.附图标记:
1.第一传动轴;2.第二传动轴;3.第一翻转轴;4.第二翻转轴;5.第一翻转电机;6.第二翻转电机;7.第一曲轴;8.第二曲轴;9.第一连杆;10.第二连杆;11.第一翻转臂;12.第二翻转臂;13.胀套;14.轴承座;15.主轴联轴器;16.皮带;17.皮带轮;18.绝对值编码器;19.伺服电机;20.弹性联轴器;21.扭矩传感器;22. 小齿轮;23.大齿轮;24.旋转盘;25.止挡环;26.弹性挡圈;27.固定夹抱臂;28.活动夹抱臂;29弹簧;30.销轴;31.翻转臂固定轴;32.电感式光电传感器;33.红外光电传感器;34.机架;35.电机支架。
具体实施方式
14.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
15.如图1-1、1-2、1-3和图2-5所示,本实施例中的卡车纵梁双向翻转机包括机架34和电机支架35,电机支架35用于安装伺服电机和扭矩传感器。
16.第一翻转动力传动机构由第一翻转电机5、皮带轮17、皮带16、第一传动轴1构成,第二翻转动力传动机构包括第二翻转电机6、皮带轮17、第二传动轴2,其中,皮带16在皮带轮17的驱动下转动,进而第一翻转电机5和第二翻转电机6分别带动第一传动轴1和第二传动轴2独立进行转动,第一传动轴1和第二传动轴2分别通过轴承座固定在机架34上。
17.第一翻转机构包括第一传动轴1、第一曲轴7、第一连杆9、第一翻转轴3、第一翻转臂11、翻转臂固定轴31,具体地,第一曲轴7通过胀套13固定在第一传动轴1上,第一连杆9的两端分别通过销轴30与第一曲轴7和第一翻转臂11铰接,第一翻转臂11通过胀套13固定在第一翻转轴3上,第一翻转轴3通过轴承座和法兰盘固定在支架上,组成一组曲轴连杆机构。
18.第二翻转机构包括第二传动轴2、第二曲轴8、第二连杆10、第二翻转轴4、第二翻转臂12、翻转臂固定轴31,具体地,第一曲轴8通过胀套13固定在第二传动轴2上,第二连杆10的两端分别通过销轴30与第二曲轴8和第二翻转臂12铰接,第二翻转臂12通过胀套13固定在第二翻转轴2上,第二翻转轴2通过轴承座和法兰盘固定在支架上,组成一组曲轴连杆机构。
19.由此,通过两套翻转动力传动机构和翻转机构,可以实现卡车纵梁翻转运动的主运动,例如顺时针方向或逆时针方向翻转,由第一翻转机构和第二翻转机构共同实现对货物的夹抱翻转。
20.具体地,皮带轮17的轴向方向上安装有绝对值编码器18,绝对值编码器18用于控制翻转电机旋转角度。
21.伺服电机19安装电机支架35上,扭矩传感器21安装在电机支架35上并通过弹性联轴器20与伺服电机19连接,扭矩传感器21用于测定旋转过程中的扭矩,通过设定合理的扭矩范围,控制伺服电机19的旋转角度和旋转速度。
22.为保证运动的稳定、平缓和有效,设置了两套可控的旋转弹性夹抱机构,其中,旋转弹性夹抱机构由夹抱动力传动机构驱动进行动作。
23.本实施例中的卡车纵梁双向翻转机还包括伺服电机19、弹性联轴器20、扭矩传感器21、小齿轮22、大齿轮23构成的夹抱动力传动机构。由旋转盘24、固定夹抱臂27、活动夹抱臂28、弹簧29、销轴30构成的旋转弹性夹抱机构,为纵梁的翻转运动提供辅助运动。
24.扭矩传感器21通过平键与小齿轮22相连接,小齿轮22与大齿轮23啮合传递力矩和
运动,小齿轮22作为主动齿轮进行运转,大齿轮23作为从动齿轮进行转动,大齿轮23通过深沟球轴承铰接在第一翻转轴3上,止挡环25和弹性挡圈26固定大齿轮23在第一翻转轴3上的位置。相同的,小齿轮22作为主动齿轮进行运转,大齿轮23作为从动齿轮进行转动,大齿轮23通过深沟球轴承铰接在第二翻转轴2上,止挡环25和弹性挡圈26固定大齿轮23在第二翻转轴2上的位置。
25.伺服电机19通过驱动旋转弹性夹抱机构对纵梁翻转起两个作用,从动夹抱和拨动送料;从动夹抱运动服从主动翻转运动,其目的是为了保证翻转运动平稳可控;拨动送料运动是将纵梁从一套翻转臂传递到另一套翻转臂的运动。
26.旋转盘24通过螺栓螺母固定在大齿轮23上,固定夹抱臂27焊接在旋转盘24上,活动夹抱臂28通过销轴30铰接在旋转盘24上,固定夹抱臂27和活动夹抱臂28通过销轴和长孔连接,在固定夹抱臂27和活动夹抱臂28中间设置有弹簧29。
27.以上所述,仅为本发明的较佳实施例,并非对本发明做任何形式上的限制。任何熟悉本领域的技术人员,在不脱离本发明技术方案范围情况下,都可利用上述所述技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明的技术对以上实施例所做的任何改动修改、等同变化及修饰,均属于本技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1