一种立体仓库调度系统及方法与流程
本技术涉及仓储物流,尤其涉及一种立体仓库调度系统及方法。
背景技术:
1、目前,随着物流业的高速发展,为了提高仓库的运行效率,通常采用诸如自动导引车(automated guided vehicle,agv)或自动移动机器人(autonomous mobile robot,amr)等自动化搬运设备,用于实现对货物的自动化运输。同时,由于仓库占地面积通常有限,土地的取得成本和使用成本较高,为了尽可能提高空间使用率,降低运行成本,现有仓库也会采用密集存储的方式存放货物。
2、现有技术中,为了能够同时解决自动化运输提高效率,以及密集存储降低成本两个问题,设计有一种密集存储仓库使用的四向穿梭车(以下简称四向车)以及四向车运行的专用立体仓库,如图1a~1b所示。图1a为立体仓库的剖视图,可见立体仓库每层包含数个相邻的存储货物的存储位,其中穿插有若干供四向车搬运货物的巷道,并且立体仓库中每层包括供四向车行驶的轨道,每个存储位上设置托放载具的支架,存储位间共用立柱支撑。图1b为立体仓库俯视图,可见货物通过密集堆放,可以节省大量空间,而通过体型较小的四向车可以灵活在各存储位间穿行,托运货物运输到存储位,或者将货物运输至仓库的接驳点出库。
3、但是,四向车属于成本较高的搬运设备,并且必须在轨道上行驶,使得采用四向车存取货物的仓库中,由于轨道的设置使仓库布局难以灵活改变,仓库建设以及使用成本较高。另外,目前四向车通常搬运的是托盘等大宗货物的容器,难以实现非大宗货物的密集存储。
技术实现思路
1、本说明书实施例提供的一种立体仓库调度系统及方法,用于部分解决现有技术中存在的应用四向穿梭车的密集存储仓库,由于底层需要布置轨道,导致只能由四向穿梭车执行搬运任务,导致仓库运行成本较高,且仓库布局不能灵活改变以及难以实现非大宗货物的密集存储的问题。
2、本说明书实施例采用下述技术方案:
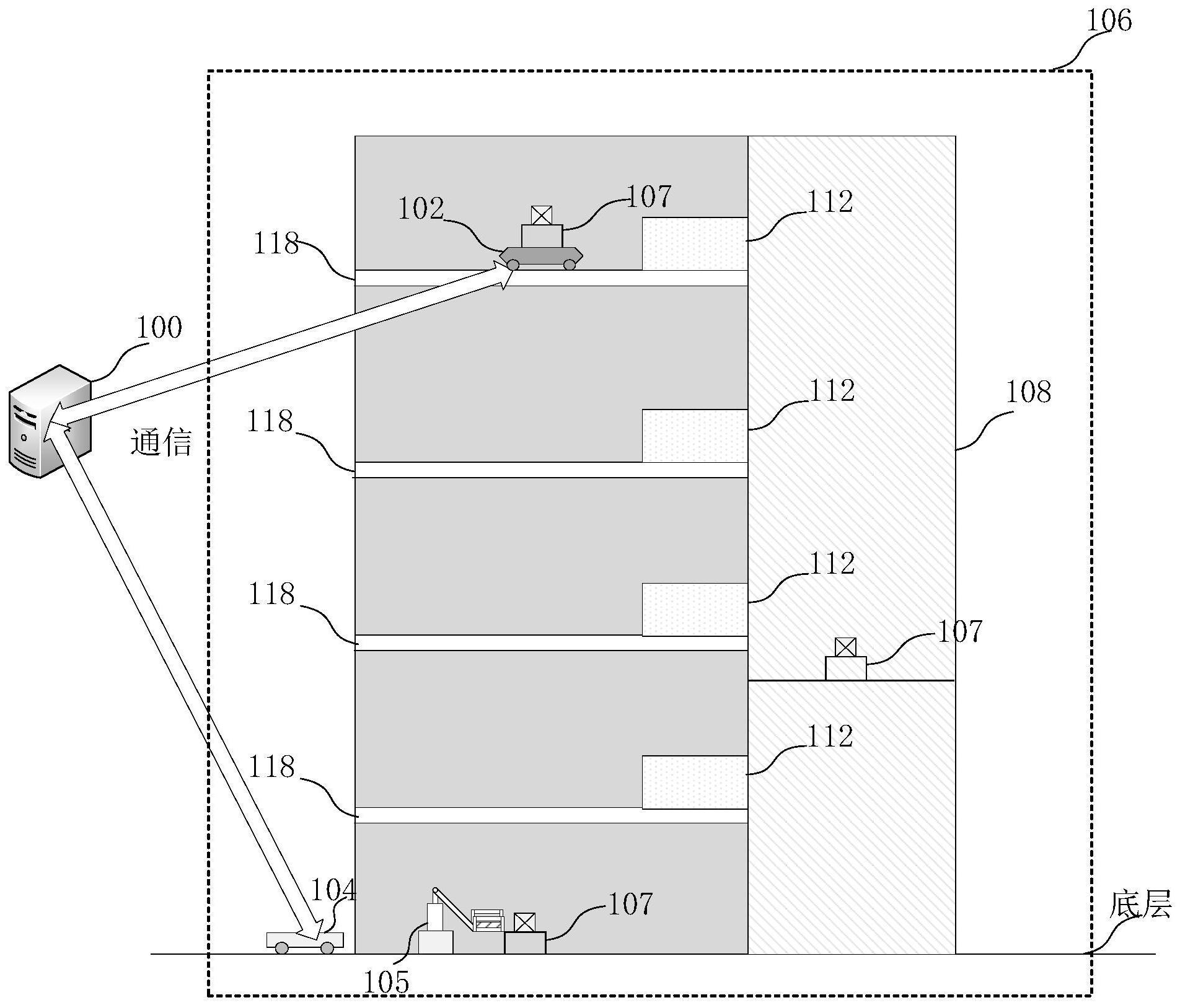
3、本说明书提供的立体仓库调度系统,所述系统包括:一个或多个控制服务器、一个或多个第一搬运设备、一个或多个第二搬运设备、至少一个立体仓库、至少一个升降设备以及一个或多个容器装卸设备,一个所述立体仓库设置有至少两层,并由所述至少一个升降设备连通所述立体仓库的各层,所述控制服务器分别与所述第一搬运设备和所述第二搬运设备通信,其中:
4、所述立体仓库的底层中的至少部分底层存储位布置有可移动载具,所述可移动载具用于承载一个或多个容器;
5、所述立体仓库除底层外的其它高层中的各层分别设置有至少一个高层接驳点,所述高层分别设置有供所述第一搬运设备运行的轨道,并且所述高层中的至少部分高层存储位布置有可移动载具;
6、所述控制服务器用于根据搬运任务,确定执行搬运任务的第一搬运设备、第二搬运设备以及升降设备,并分别向所述第一搬运设备、第二搬运设备和升降设备发送用于执行所述搬运任务的搬运指令,以及确定用于装卸容器的容器装卸设备,并向所述容器装卸设备发送用于执行与所述搬运任务对应的取货任务或者存货任务的操作指令;
7、所述第一搬运设备用于根据所述控制服务器发送的搬运指令,在所述高层存储位中取出或放置所述搬运指令指示的可移动载具,以及在所述高层存储位与所述高层接驳点之间搬运所述搬运指令指示的可移动载具;
8、所述第二搬运设备用于根据所述控制服务器发送的搬运指令,在所述底层存储位中取出或放置所述搬运指令指示的可移动载具,以及在所述升降设备与所述底层存储位之间、所述升降设备与所述容器装卸设备之间或所述底层存储位与所述容器装卸设备之间搬运所述搬运指令指示的可移动载具;
9、所述升降设备用于根据所述控制服务器发送的搬运指令上升或下降至指定层,并在各层之间至少搬运所述搬运指令指示的可移动载具、所述第一搬运设备和所述第二搬运设备中的一种或多种的组合;
10、所述容器装卸设备用于根据所述控制服务器发送的操作指令,从所述第二搬运设备搬运的可移动载具中取出容器,或将容器放在所述第二搬运设备搬运的可移动载具中。
11、可选地,所述容器装卸设备包括第一传感器,所述第一传感器用于在从所述可移动载具中取出容器时,确定所述可移动载具中对应的容器位是否有容器,或者在将容器放在所述可移动载具时,确定所述可移动载具中对应的容器位是否为空。
12、可选地,所述容器装卸设备包括第二传感器,所述第二传感器用于确定所述容器装卸设备与所述可移动载具中对应的容器位之间的位姿偏差。
13、可选地,所述容器装卸设备还用于根据所述第二传感器确定出的所述容器装卸设备与对应的容器位之间的位姿偏差,调整所述容器装卸设备的位姿,消除所述位姿偏差。
14、可选地,所述第一传感器和第二传感器为同一个传感器。
15、可选地,所述第一传感器以及所述第二传感器为图像传感器。
16、可选地,所述控制服务器还用于,调度所述第一搬运设备、第二搬运设备和升降设备中的至少之一将可移动载具返回至所述立体仓库的原存储位或其他存储位。
17、可选地,所述控制服务器,所述控制服务器,进一步用于根据所述可移动载具上存储的货物的货物装卸频率以及货物存取数量中的至少一种,确定所述可移动载具的活跃度,根据所述可移动载具的活跃度的排序,确定所述可移动载具在返回至所述立体仓库时的存储位。
18、可选地,所述控制服务器,进一步用于根据所述容器装卸设备与空闲的存储位之间的距离排序,确定所述可移动载具在返回至所述立体仓库时的存储位。
19、可选地,所述控制服务器还用于,响应于理货任务,调度所述第一搬运设备、所述第二搬运设备和所述升降设备中的至少之一将可移动载具从所述立体仓库的原存储位调整至其他存储位或者保持原存储位不变。
20、可选地,所述控制服务器,所述控制服务器,进一步用于根据所述可移动载具上存储的货物的货物装卸频率以及货物存取数量中的至少一种,确定所述可移动载具的活跃度,根据所述可移动载具的活跃度的排序,确定所述可移动载具在理货时调整位置后的存储位。
21、可选地,所述容器装卸设备位于底层工作站中,所述工作站还包括传输线以及拣选工位,所述传输线的入口以及出口分别设置所述容器装卸设备,所述拣选工位位于所述传输线的传输路径中;
22、位于所述传输线的入口的所述容器装卸设备,还用于从位于所述入口处的可移动载具中取出容器,放在所述传输线上;
23、位于所述传输线的出口的所述容器装卸设备,还用于获取所述传输线运输来的容器,并放在位于所述出口处的所述可移动载具中。
24、可选地,所述用于存放可移动载具的轨道的高度大于所述第一搬运设备在未承载所述可移动载具时的高度;所述第一搬运设备进一步用于驶入所述高层存储位下方,并从所述高层存储位的下方以背驮方式搬运所述可移动载具并离开高层存储位。
25、可选地,当所述立体仓库中包含多个升降设备时,所述多个升降设备所能到达的指定层之间至少存在重叠。
26、可选地,所述升降设备内设置有轨道,用于与所述高层中设置的轨道连接,使所述第一搬运设备行驶至所述升降设备内。
27、可选地,所述控制服务器还用于,至少部分地根据各高层待执行的搬运任务,确定各高层所需的第一搬运设备的数量,以及根据各高层所需的第一搬运设备的数量和当前各高层的第一搬运设备的数量,确定各高层需要调用的第一搬运设备,并发送调用指令给需要调用的第一搬运设备;
28、所述第一搬运设备还用于,根据接收到的调用指令,行驶至所述升降设备内,通过所述升降设备到达所述调用指令指定的高层。
29、可选地,所述高层接驳点设置为位于所述升降设备内;
30、所述第一搬运设备进一步用于,行驶至所述升降设备内的高层接驳点处,将所述可移动载具放置于所述高层接驳点,或者,从所述高层接驳点的取出所述可移动载具。
31、可选地,在高层中的至少部分层还设置有所述容器装卸设备,所述高层接驳点设置为分别位于高层的所述容器装卸设备位置附近和所述升降设备内;
32、所述第一搬运设备进一步用于,在高层存储位与所述容器装卸设备位置附近的高层接驳点之间搬运所述可移动载具,或者,在所述容器装卸设备位置附近的高层接驳点与所述升降设备内的高层接驳点之间搬运集货载具;
33、所述容器装卸设备还用于,从所述可移动载具中取出容器并放在集货载具中,或将容器从集货载具中取出并放在所述可移动载具中。
34、可选地,所述可移动载具包括支腿,所述可移动载具的支腿形成的开口的高度高于所述第二搬运设备在未承载所述可移动载具时的高度;所述第二搬运设备进一步用于,在未承载所述可移动载具时可选择性地在所述至少部分可移动载具下方穿行,或者,从所述至少部分可移动载具下方以背驮方式搬运所述可移动载具并离开底层存储位。
35、可选地,所述立体仓库的底层中的至少部分底层存储位间立柱的间隔大于所述第二搬运设备的宽度,以及,所述立体仓库的底层中至少部分相邻的两根立柱之间的连接件的最低点的高度高于所述第二搬运设备在未承载所述可移动载具时的高度;所述第二搬运设备进一步用于,在未承载所述可移动载具时可选择性地在所述底层中至少部分相邻的两根立柱之间穿行。
36、可选地,所述第二搬运设备用于在所述底层存储位相邻的巷道位置,进入所述底层存储位,从所述底层存储位取出所述可移动载具至所述第二搬运设备上,或者将所述第二搬运设备上的所述可移动载具放在所述底层存储位中。
37、可选地,所述立体仓库的底层设置有至少一个底层接驳点;
38、所述第二搬运设备还用于根据所述控制服务器发送的搬运指令,在所述底层存储位与所述底层接驳点之间或所述升降设备与所述底层接驳点之间搬运所述搬运指令指示的可移动载具。
39、可选地,所述立体仓库的底层的指定区域设置有至少一个底层接驳点;
40、所述第二搬运设备用于从所述底层存储位或所述升降设备取出所述可移动载具,并将所述可移动载具搬运至所述底层接驳点,将所述可移动载具放置于所述指定区域内;或者,从所述指定区域的底层接驳点取出所述可移动载具,并将所述可移动载具搬运至所述底层存储位或所述升降设备。
41、可选地,所述系统还包括:一个或多个外部缓存区,所述外部缓存区的形式为立体存储或平面存储中的至少一种;
42、所述外部缓存区与所述至少一个立体仓库共用至少部分第二搬运设备,或,所述第二搬运设备在所述外部缓存区与所述至少一个立体仓库之间搬运和/或接驳所述可移动载具;
43、所述控制服务器还用于,存储所述外部缓存区与所述至少一个立体仓库中的货物库存信息。
44、可选地,所述容器装卸设备通过吸取、推动、夹取、抓取、钩取、抱起、抬升方式中的至少一种从所述可移动载具中取出容器或者将容器放在所述可移动载具中。
45、可选地,所述可移动载具为可移动货架,所述可移动货架包括至少一层隔板,所述至少一层隔板将所述可移动货架分割为至少两层,所述可移动货架的隔板上设置有至少一个存储位,每个存储位可承载至少一个可容纳仓储货物的第一容器。
46、可选地,所述容器装卸设备包括架体,所述架体上设置有取送容器组件和承载组件,所述取送容器组件被配置为在所述架体上移动;所述架体包括方向相互垂直的x轴轨道和y轴轨道;所述y轴轨道被构造为沿着x轴轨道运动,所述取送容器组件被构造为沿着y轴轨道运动;所述取送容器组件可延沿z轴方向从载具上取出容器并装载至所述承载组件上或者从所述承载组件卸载容器并放在载具上。
47、可选地,所述架体包括门架组件,所述x轴轨道包括地轨结构和设置在门架组件上的天轨结构;所述y轴轨道的两端分别与地轨结构和天轨结构导向配合在一起。
48、可选地,所述y轴轨道设置有至少两个,每个y轴轨道上设置有至少一个所述取送容器组件。
49、可选地,所述取送容器组件通过吸取、推动、夹取、抓取、钩取、抱起、抬升方式中的至少一种从所述载具中取出容器或者将容器放在所述载具中。
50、本说明书提供的用于立体仓库调度方法,所述立体仓库至少存在一个或多个,所述立体仓库设置有至少两层,所述立体仓库至少由一个升降设备连通所述立体仓库的各层,所述底层中设置有一个或多个容器装卸设备,所述底层中的至少部分底层存储位布置有可移动载具,所述立体仓库除底层外的其它高层中的各层分别设置有至少一个高层接驳点,所述高层分别设置有供第一搬运设备运行的轨道,并且所述高层中至少部分高层存储位布置有所述可移动载具,所述方法包括:
51、确定待执行的搬运任务;
52、根据所述搬运任务,确定执行搬运任务的第一搬运设备、第二搬运设备以及升降设备,以及确定用于装卸容器的容器装卸设备;
53、向确定出的所述第一搬运设备、第二搬运设备和升降设备分别发送搬运指令以及向所述容器装卸设备发送操作指令;
54、其中,所述搬运指令用于使所述第一搬运设备、第二搬运设备和升降设备配合将所述可移动载具从所述立体仓库的高层存储位或底层存储位中搬运至所述底层设置的容器装卸设备,或从所述底层设置的容器装卸设备处,将可移动载具搬运至所述立体仓库的高层存储位或底层存储位中;
55、所述操作指令用于使所述容器装卸设备将所述可移动载具中的容器取出或将容器放在所述可移动载具中。
56、本说明书实施例采用的上述至少一个技术方案能够达到以下有益效果:
57、通过在立体仓库混合使用第一搬运设备以及第二搬运设备,利用立体仓库中的升降设备搬运功能,使得第一搬运设备和第二搬运设备可协作在密集存储仓库中搬运可移动载具,通过设置容器装卸设备从可移动载具中拿取或向其中放置货物,可移动载具可放置多个容器,提高存储空间利用率,通过容器装卸设备实现从可移动载具高效存取容器,能够增加对立体仓库中货物的分拣效率,降低了仓库运行成本,实现了搬运效率的提升。
- 还没有人留言评论。精彩留言会获得点赞!