一种用于箱体转运的电动搬运车的制作方法
1.本发明涉及机械设备技术领域,特别涉及一种用于箱体转运的电动搬运车。
背景技术:
2.目前国内外(特别是国外)的居民住宅附近都有许多用来装盛生活垃圾的垃圾箱,这些垃圾箱装满时,重量会比较重,多的会将近达到两吨。
3.目前这种满载的垃圾箱都是采用人工搬运的方式,通过人工将其转运到公路旁,再由垃圾清理车对垃圾进行清理。在人工转运时并没有机械设备或工具可以使用,不仅整个转运过程费时费力,而且当转运过程中路面有坑或坡度时,还容易发生危险。例如在坡道上没法刹住垃圾箱导致垃圾箱不受控制的在坡道上运动;在坑洼路面时,垃圾箱脚轮掉入坑中,需要很大人力将其弄出等。
4.因此,如何能够提供一种解决上述技术问题的用于箱体转运的电动搬运车是本领域技术人员亟需解决的技术问题。
技术实现要素:
5.本发明的目的是提供一种用于箱体转运的电动搬运车,可以代替人力,解决了中大型箱体在窄道转运的问题,使得中大型箱体如垃圾箱的转运过程更省力,也更加的安全可靠。
6.为实现上述目的,本发明提供一种用于箱体转运的电动搬运车,包括车架,所述车架的底部四角设置有移动轮,所述车架的前侧设置有载物架总成,所述车架的后侧设置有驱动轮总成以及连接并控制所述驱动轮总成转动的操纵转向总成。
7.优选地,所述操纵转向总成具有握持部以及与所述驱动轮总成固定连接的连接部,所述握持部与所述连接部解锁后向后180
°
翻转折叠。
8.优选地,所述移动轮包括设于所述车架前侧的承载轮总成,所述承载轮总成与所述驱动轮总成构成三支点结构。
9.优选地,所述移动轮还包括设于所述车架后侧的辅助轮总成,所述辅助轮总成邻近所述驱动轮总成,所述辅助轮总成的离地高度可调。
10.优选地,所述车架的中部还设置有供电池装入的电池腔以及封闭所述电池腔的机罩,所述电池腔设有固定所述电池的弹性卡片。
11.优选地,所述车架还设置有驱动总成,所述驱动总成连接并驱动所述载物架总成实现升降运动。
12.优选地,所述驱动总成包括前端铰接于所述车架的前侧、后端铰接于所述载物架总成的油缸;所述载物架总成包括受所述油缸驱动的载物架,所述载物架通过连板与所述车架构成四连杆机构。
13.优选地,所述载物架的中部设有向前剖空的开口,所述开口处设置有一对可开合的夹板。
14.优选地,所述载物架设有滑槽,所述滑槽中装设有可前后滑动的连接轴,所述连接轴连接所述油缸的后端,所述连接轴与拉杆的第一端铰接,所述夹板与所述拉杆的第二端铰接。
15.优选地,所述车架还设有挡货架总成,所述挡货架总成包括挡货架,所述挡货架具有板件以及设于所述板件的伸缩轴和锁止板,所述伸缩轴套装弹簧并连接所述车架,所述载物架设有上升后卡住所述锁止板的顶板。
16.相对于上述背景技术,本发明所提供的用于箱体转运的电动搬运车包括车架、载物架总成、驱动轮总成和操纵转向总成,车架的底部四角设置有移动轮,载物架总成设置于车架的前侧,驱动轮总成和操纵转向总成设置于车架的后侧,操纵转向总成连接并控制驱动轮总成转动。
17.该用于箱体转运的电动搬运车在使用时,将垃圾箱与搬运车组合,使得箱体支撑固定于车架的载物架总成上,然后即可通过驱动轮总成带动车架移动,移动轮从动,在此期间通过人工转动操纵转向总成控制车架移动的方向。上述搬运车可以代替人力,解决中大型箱体在窄道转运的问题,使得中大型箱体如垃圾箱的转运过程更省力,也更加的安全可靠。
附图说明
18.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
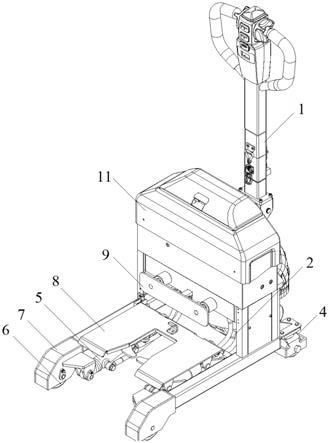
19.图1为本发明实施例提供的用于箱体转运的电动搬运车的结构示意图;
20.图2为本发明实施例提供的用于箱体转运的电动搬运车的零部件图;
21.图3为本发明实施例提供的用于箱体转运的电动搬运车的零部件正视图;
22.图4为本发明实施例提供的载物架总成的升降原理图;
23.图5为本发明实施例提供的载物架总成的零部件图;
24.图6为本发明实施例提供的载物架总成的第一状态正视图;
25.图7为本发明实施例提供的载物架总成的第一状态俯视图;
26.图8为本发明实施例提供的载物架总成的第二状态正视图;
27.图9为本发明实施例提供的载物架总成的第二状态俯视图;
28.图10为本发明实施例提供的挡货架总成的零部件图;
29.图11为本发明实施例提供的挡货架的结构示意图;
30.图12为本发明实施例提供的挡货架总成的第一状态示意图;
31.图13为本发明实施例提供的挡货架总成的第二状态示意图。
32.其中:
[0033]1‑
操纵转向总成、2
‑
驱动轮总成、3
‑
液压单元、4
‑
辅助轮总成、5
‑
驱动总成、6
‑
承载轮总成、7
‑
车架、8
‑
载物架总成、9
‑
挡货架总成、10
‑
电控总成、11
‑
机罩、12
‑
电池;
[0034]
51
‑
油缸、71
‑
第一安装座、72
‑
第二安装座;
[0035]
801
‑
载物架、802
‑
隔套、803
‑
轴芯、804
‑
连板、805
‑
滑动套、806
‑
上固定轴、807
‑
下
固定轴、808
‑
后杆端轴承、809
‑
左夹板、810
‑
右夹板、811
‑
滑槽、813
‑
前杆端轴承;
[0036]
901
‑
挡货架、902
‑
弹簧、903
‑
直线滑动衬套、904
‑
尼龙块、905
‑
卡板、907
‑
挡板、908
‑
顶板;
[0037]
9010
‑
板件、9011
‑
伸缩轴、9012
‑
锁止板;
[0038]
01
‑
箱体。
具体实施方式
[0039]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0040]
为了使本技术领域的技术人员更好地理解本发明方案,下面结合附图和具体实施方式对本发明作进一步的详细说明。
[0041]
请参考图1至图13,其中,图1为本发明实施例提供的用于箱体转运的电动搬运车的结构示意图,图2为本发明实施例提供的用于箱体转运的电动搬运车的零部件图,图3为本发明实施例提供的用于箱体转运的电动搬运车的零部件正视图,图4为本发明实施例提供的载物架总成的升降原理图,图5为本发明实施例提供的载物架总成的零部件图,图6为本发明实施例提供的载物架总成的第一状态正视图,图7为本发明实施例提供的载物架总成的第一状态俯视图,图8为本发明实施例提供的载物架总成的第二状态正视图,图9为本发明实施例提供的载物架总成的第二状态俯视图,图10为本发明实施例提供的挡货架总成的零部件图,图11为本发明实施例提供的挡货架的结构示意图,图12为本发明实施例提供的挡货架总成的第一状态示意图,图13为本发明实施例提供的挡货架总成的第二状态示意图。
[0042]
在第一种具体的实施方式中,本发明所提供的用于箱体转运的电动搬运车包括车架7、载物架总成8、驱动轮总成2和操纵转向总成1,车架7的底部四角设置有移动轮,载物架总成8设置于车架7的前侧,驱动轮总成2和操纵转向总成1设置于车架7的后侧,操纵转向总成1连接并电驱控制驱动轮总成2转动。
[0043]
在本实施例中,操纵转向总成1固定连接在驱动轮总成2上,驱动轮总成2位于车架7的中心孔下方的独轮橡胶轮,驱动轮总成2在车架7的中心孔通过轴承进行安装,可以在车架7的中心孔自由旋转,所以操纵转向总成1可以带动驱动轮总成2绕着车架7的中心孔转动,实现手动转向,驱动轮总成2以电力驱动的方式带动车架7运动。
[0044]
该搬运车在使用时,将垃圾箱与搬运车组合,组合的方式包括但不限于将搬运车开到垃圾箱底部和将垃圾箱推入搬运车的方式,均应属于本实施例的保护范围;使得箱体01支撑固定于车架7的载物架总成8上,然后即可通过驱动轮总成2带动车架7移动,移动轮从动,在此期间通过人工转动操纵转向总成1,进而转动驱动轮总成2以控制车架7移动的方向,故整车能够实现运行与转向。该搬运车可以代替人力,解决中大型垃圾箱(还可以是其他规格和形式的箱体01)在窄道的中短距离转运的问题,使得中大型垃圾箱的转运过程更省力,也更加的安全可靠。
[0045]
进一步的,操纵转向总成1具有可折叠的特点。
[0046]
具体而言,操纵转向总成1具有握持部和连接部;握持部包括左右分布的握把部分以及固定连接于握把部分下端的竖杆部分;连接部呈座状,其下端与驱动轮总成2固定连接,上端与竖杆部分活动连接且可锁定。
[0047]
需要说明的是,握持部和连接部的活动连接方式包括但不限于可拆式或铰接式,包括但不限于锁定时二者同轴竖直、解锁时连接部向后180
°
翻转折叠的方式,此时可以很方便的把车辆开到很小的空间内,进行打包运输或跟车出行。
[0048]
进一步的,移动轮包括设于车架7前侧的承载轮总成6,承载轮总成6起到主要承载的作用。
[0049]
在本实施例中,承载轮总成6对称布置于车架7的前侧两边,承载轮总成6位于远离驱动轮总成2的车架7前侧;在承载轮总成6的数量为一对时,一对承载轮总成6与驱动轮总成2构成三支点结构,三支点共同分担车架7及其上垃圾箱的重力,保障车架7移动的平稳可靠。
[0050]
更进一步的,移动轮还包括设于车架7后侧的辅助轮总成4,辅助轮总成4起到辅助承载的作用。
[0051]
在本实施例中,辅助轮总成4对称布置于车架7的后侧两边,承载轮总成6位于邻近驱动轮总成2的车架7后侧;在辅助轮总成4的数量为一对时,一对辅助轮总成4在原有的三支点结构的基础上进一步的强化以保障车架7移动的平稳可靠。
[0052]
需要注意的是,一对辅助轮总成4固定安装在车架7靠近驱动轮总成2一端即驱动端的辅助轮支架上,且辅助轮总成4中的辅助轮可通过垫片调整辅助轮的离地高度或者直接使用弹簧式辅助轮,从而满足不同的使用需要。
[0053]
综上,驱动轮总成2、辅助轮总成4、承载轮总成6和车架7构成了整车的底盘车身结构。
[0054]
除此以外,底盘结构上还设置有电控总成10,电控总成10位于车架7内部的侧板上且处于垂直安装的状态,电控总成10负责控制车辆的动作。
[0055]
另外,车架7的中部还设置有供电池12装入的电池腔,电池腔与电控总成10同属于车架7的内部,电池腔还装配有封闭电池腔的机罩11,机罩11具有铰接开合的开盖,以便于电池12穿过机罩11后装入车架7内部的电池腔中,机罩11对电池12提供防水的效果,即使雨天也可以露天使用;电池12采用可拔插式安装方式,方便更换与充电。
[0056]
在此基础上,电池腔设有固定电池12的弹性卡片。
[0057]
在本实施例中,弹性卡片既可以是装设于电池腔的单独零件,也可以是与电池腔同为一体的结构部分,同应属于本实施例的说明范围。电池12为车辆提供能源,弹性卡片在电池12装入后卡住电池12,防止电池12在车辆运行时抖动。
[0058]
在一种具体的实施方式中,载物架总成8具有可升降的特点。
[0059]
在本实施例中,采用将搬运车开到垃圾箱底部的方式,使得载物架总成8位于垃圾箱的底部和底部的脚轮之间,然后通过载物架总成8的起升动作抬起垃圾箱。
[0060]
示例性的,载物架总成8通过借助驱动总成5的动力实现升降运动,此时驱动总成5设置于车架7上,驱动总成5连接并驱动载物架总成8实现升降运动。
[0061]
需要说明的是,驱动总成5的设置方式有多种,驱动方式包括但不限于电力驱动和液压驱动等,运动方式包括但不限于轨道式和推杆式,同应属于本实施例的说明范围。
[0062]
示例性的,驱动总成5包括油缸51,此时油缸51的前端铰接于车架7的前侧,后端铰接于载物架总成8。
[0063]
在本实施例中,通过油缸51的伸缩运动,进而驱使载物架总成8实现升降运动;其中,在载物架总成8下降时进入垃圾箱的底部,在载物架总成8上升后抬起垃圾箱以便转运。
[0064]
在一种具体的实施方式中,载物架总成8包括受油缸51驱动的载物架801,载物架801通过连板804与车架7构成四连杆机构。
[0065]
在本实施例中,载物架801通过连板804铰接在车架7上,载物架801与连板804与车架7形成平行四边形的四连杆机构,故载物架801能绕着车架7上的铰点做平行四连杆机构运动。
[0066]
除此以外,底盘结构上还设置有液压单元3,液压单元3与电控总成10分别安装在车架7内部的左右侧板上,液压单元3也处于垂直安装的状态,液压单元3为车辆的起升提供动力,液压采用同步阀加双作用活塞缸的方案,保证了车辆的起升、下降的同步性与速度可控制性。
[0067]
进一步的,载物架801的中部设有向前剖空的开口,开口处设置有一对可开合的夹板,夹板铰接于载物架801以实现绕着载物架801的铰点旋转,其包括对称布置的左夹板809和右夹板810。
[0068]
在本实施例中,当垃圾箱与搬运车组合时,以将搬运车开到垃圾箱底部的方式为例:载物架801位于垃圾箱的底部与底部的脚轮之间,通过起升载物架801以及夹板抱紧垃圾箱的脚轮,使垃圾箱的箱体01支撑固定于载物架801的上侧。此时箱体01底部的脚轮位于载物架801中部的开口中,左夹板809和右夹板810由打开状态变化为闭合状态,将箱体01底部的脚轮抱紧,以便在移动和转向时固定垃圾箱。
[0069]
需要说明的是,夹板的开合方式可通过铰接实现,其驱动控制方式包括但不限于电动和液压控制等,同应属于本实施例的说明范围。
[0070]
更进一步的,载物架801设有滑槽811,滑槽811中装设有可前后滑动的连接轴,连接轴连接油缸51的后端,连接轴与拉杆的第一端铰接,夹板与拉杆的第二端铰接。
[0071]
在本实施例中,油缸51一端铰接在靠近承载轮总成6的车架7上,一端通过载物架总成8的连接轴与载物架总成8铰接,油缸伸缩时,带动载物架绕车架运动。载物架801通过连板804与连接轴铰接在车架7上,连接轴在滑槽811中具有前后方向的运动余量,当油缸51驱动连接轴在滑槽811中运动到极限位置后继续驱动时载物架801做升降运动,当油缸51驱动连接轴在滑槽811中运动且不运动到极限位置时夹板做开合运动。
[0072]
更具体的,载物架总成8还包括隔套802、轴芯803、滑动套805、上固定轴806、下固定轴807、后杆端轴承808和前杆端轴承813,隔套802、轴芯803和滑动套805属于连接轴,后杆端轴承808和前杆端轴承813属于拉杆。
[0073]
其中,第一安装座71为车架7的一部分,用于安装载物架总成8;在载物架801于车架7的第一安装座71之间,连板804的上端通过上固定轴806与载物架801铰接,连板804的下端通过下固定轴807与第一安装座71铰接,连板804对称布置在载物架801的两侧,使得载物架801、连板804与车架7形成平行四边形的四连杆机构,故载物架801能绕着车架7上的铰点做平行四连杆机构运动,即绕着连板804与第一安装座71的铰接点转动。
[0074]
其中,隔套802与轴芯803同轴安装并固定为一体,滑动套805通过衬套铰接在轴芯
803上,滑动套805的材质可以是钢材,钢套的外表面则穿过滑槽811,能够在滑槽811上滑动;油缸51也通过衬套与轴芯803铰接在一起,且对称布置。
[0075]
其中,后杆端轴承808和前杆端轴承813组合在一起构成拉杆,由于两者通过螺纹连接形式组合在一起,使得此拉杆的长短可以调节;并且因为是杆端轴承,故安装时,可以存在一定的倾斜角度;拉杆的前端铰接夹板的安装柱上,后端通过螺栓与隔套802的耳板铰接在一起;此时左夹板809和右夹板810分别铰接在载物架801的安装柱上,对称布置,且能分别绕着各自的铰接点转动。
[0076]
在工作时,初始状态下,如图6和7所示,对称布置的夹板组成的抱夹处于打开状态,这时轴芯803与滑动套805处于靠近车架7前侧的位置即滑槽811的前端,油缸51处于缩回状态,此时载物架801未起升,高度最低。当油缸51在液压油的作用下慢慢伸长时,油缸51带动轴芯803向前运动,这轴芯803上铰接的滑动套805则在载物架801的滑槽内向前滑动,此时载物架801没有运动;而因隔套802也在轴芯803的带动下向前运动,故夹板在隔套802带动的拉杆的作用下,绕载物架801上的安装柱转动,当轴芯803上的滑动套805滑动到滑槽811的最后端时,夹板向内转动进而使抱夹关闭。当油缸51继续伸长,由于滑动套805已经运动到滑槽811的最后端,故油缸51继续伸长时,滑动套805不能在继续滑动,转而推动载物架801向后运动,进而在平行四连杆机构的作用下使载物架801上升,此时载物架801在向后运动的同时还在向上运动,实现将抱夹抱住的物体进行向后拖拽同时向上升起。当载物架801处于最高点时,如图8和9所示,油缸51受到控制缩回时,在油缸51力的作用下,由于轴芯803上的滑动套805位于滑槽811的最后端时油缸51与滑槽811锁成的角度小于滑动套805处于滑槽811最前端时油缸51与滑槽811锁成的角度,故油缸51缩回时,载物架801先在油缸51的力与自身重力的作用下,向下运动的同时向前运动;当运动到载物架801被车架7上的机械限位限制住时,载物架801处于最低状态,便不再向前且向下运动;然而油缸51还在缩回,故轴芯803在油缸51的力的作用下,带动滑动套805运动使抱夹逐渐打开,载物架801与抱夹处于最初时始状态。
[0077]
需要注意的是,抱夹能够先抱紧脚轮再起升,从而避免车辆运行过程中的危险。
[0078]
在此基础上,还可进一步设置检测机构,包括设置于载物架801的检测板和车架7的检测开关,当载物架801上升以至于检测板遮住检测开关时,信号反馈到电控总成10,控制油缸51停止运动;此时载物架801处于最高点,抱夹处于闭合状态。与此类似的,在抱夹设置检测机构,使得抱夹完全打开后,检测开关接受到信号,油缸51受到控制停止运动。
[0079]
进一步的,车架7还设有挡货架总成9,挡货架总成9包括挡货架901,挡货架901具有板件9010以及设于板件9010的伸缩轴9011和锁止板9012,伸缩轴9011套装弹簧902并连接车架7,载物架801设有上升后卡住锁止板9012的顶板908。
[0080]
更具体的,挡货架总成9还包括直线滑动衬套903、尼龙块904和挡板907,其中,第二安装座72为车架7的一部分,用于安装挡货架总成9,挡货架901的伸缩轴9011安装在第二安装座72上,能够相对车架7滑动;挡货架901通过导轨安装在车架7的导槽上,能够沿着导轨前后滑动,伸缩轴9011通过第二安装座72后,与挡板907通过螺钉固定在一起,使得挡货架901不会在弹簧902的作用下滑出第二安装座72的导槽;直线滑动衬套903安装在第二安装座72上;尼龙块904安装在车架7上,起到减小挡货架901上的锁止板9012与车架7摩擦的效果;顶板908用螺钉安装在车体7的载物架801上。
[0081]
在本实施例中,挡货架901在受到压力时,弹簧902受压,挡货架901由前向后滑动;当压力消失后,在弹簧902的作用将挡货架901推回初始状态。
[0082]
在此基础上,挡货架总成9还包括卡板905,卡板905通过销铰接到车架7上,由于卡板905自身结构的原因,初始状态时,卡板905较大一端在重力的作用下下垂,受到卡板905较小一端的限位下保持稍微下垂状态,在顶板908上升以推动卡板905的较大一端时,卡板905卡住锁止板9012。
[0083]
在工作时,如图12所示,初始状态时,顶板908在载物架801上,处于最低位置,箱体01的侧面与挡货架901接触,箱体01的底面与载物架801接触,此时挡货架901的弹簧902的弹力最小;卡板905在自身重力的作用下有一个下垂的角度,该角度由卡板905较小一端的与车架7的限位控制;当车辆给出起升信号后,载物架801在油缸51的作用下慢慢起升,则箱体01与顶板908跟随载物架801起升,箱体01的脚轮也在载物架801的抱夹的作用下拉着向车架7后侧的方向运动,箱体01会顶着挡货架901,由于在挡货架901的伸缩轴9011与第二安装座72之间安装了直线滑动衬套903,故这套机构的耐用性大大提高,也保证了间隙。当运动到顶板908与卡板905接触时,顶板908会给卡板905一个顶升力,使之绕着铰点运动;此时载物架801继续起升,卡板905在顶板908的作用下会卡住锁止板9012中的卡齿,如图13所示。由于挡货架901被卡板905卡住,故不能继续运动,此时达到了载物架801起升的最高点。因为挡货架901被限制住了运动,便能给箱体01提供一个支撑力,此支撑力能够用来控制箱体01跟随车体的进行转向与其他运动,此时弹簧902被压缩较大,故有较大的弹力。当车辆下降时,顶板908随着载物架801下降,箱体01也随着载物架801向车架7前侧的方向运动,挡货架901在受到弹簧902的力的作用下,也向车架7前侧的方向运动,卡板905在自身重力与卡齿的作用下慢慢下垂,回到初始位置。
[0084]
需要注意的是,在这个过程中,因为锁止板9012的卡齿上有较多的齿,且初始状态时挡货架901只受到弹簧902较小的弹力,对于不同规格尺寸的箱体01而言,挡货架901能够进行自适应的调整,故整套机构可以适用较大范围的不同箱体01。
[0085]
需要说明的是,在本说明书中,诸如第一和第二之类的关系术语仅仅用来将一个实体与另外几个实体区分开来,而不一定要求或者暗示这些实体之间存在任何这种实际的关系或者顺序。
[0086]
以上对本发明所提供的用于箱体转运的电动搬运车进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1