一种物流包裹智能堆垛装置
1.本发明涉及物流管理技术领域,具体涉及到一种物流包裹智能堆垛装置。
背景技术:
2.电子商务的发展,带动了物流运输业的发展。在进行货物运输之前,需要对货物进行打包装载,大量的包裹利用人力打包归置会导致成本较高且效率低下,而堆垛设备可以将货物自动存入指定的货格或位置,或者将物品运送到装载处,十分便捷。目前的堆垛设备大多按照既定的计算程序进行固定轨迹的运动,灵活性较差,且在堆垛过程中由于运动带来的抖动导致一些累计误差,影响堆放位置的精确性,而且不能根据客户的具体需求进行远程手动控制。
3.综上所述,提供一种可根据用户需求对进行多样化的堆垛操作,采用防抖补偿方式使得堆垛更加精准和安全的物流包裹智能堆垛装置,是本领域技术人员急需解决的问题。
技术实现要素:
4.本方案针对上文提到的问题和需求,提出一种物流包裹智能堆垛装置,其由于采取了如下技术方案而能够解决上述技术问题。
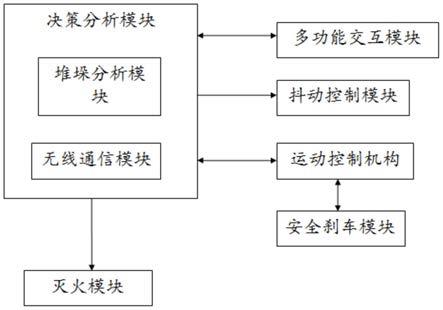
5.为实现上述目的,本发明提供如下技术方案:一种物流包裹智能堆垛装置,包括:多功能交互模块、抖动控制模块、运动控制机构、安全刹车模块和决策分析模块;
6.所述多功能交互模块用于与管理人员进行语音交互、并录入模仿动作信息和远程手动控制信息;
7.所述抖动控制模块与所述决策分析模块电连接,所述抖动控制模块用于检测堆垛设备的角度变化信息,按照设定规则进行补偿分析,获得抖动补偿信息,抖动平衡机构依据抖动补偿信息进行平衡控制;
8.所述运动控制机构与所述决策分析模块电连接,所述运动控制机构用于接收运动控制指令,根据控制指令控制堆垛装置的运动机构完成指定动作;
9.所述安全刹车模块与所述运动控制机构电连接,所述安全刹车模块用于在紧急情况下进行主动刹车保护;
10.所述决策分析模块用于接收上行控制指令,确定堆垛方案,依据方案输出运动控制指令,并向远程控制终端反馈动作执行数据。
11.进一步地,所述多功能交互模块包括语音交互模块、同步动作录入模块和远程智能控制模块;
12.所述语音交互模块包括语音录入装置和语音播放装置,所述语音录入装置包括用于录入工作人员语音信息的拾音咪头、用于对语音信息进行滤波处理的音频滤波器和语音识别器,拾音咪头与所述音频滤波器电连接,所述拾音咪头将录入的语音信息输入音频滤波器,经过音频滤波器输出滤波处理后的语音信号,将语音信号输入所述语音识别器,所述
语音识别器对语音信号进行音频特征提取,采用基于深度学习的方法对提取的音频特征进行分析,得出语音识别结果,将所述语音识别结果发送至所述决策分析模块,决策分析模块根据语音指令控制运动机构进行运动,并发送语音控制信号至所述语音播放装置,所述语音播放装置用于播放设定的语音对话信息;
13.所述同步动作录入模块用于录入工作人员的动作图像信息,并进行动作分析,基于分析结果获得运动参数,将所述运动参数传输至决策分析模块,所述同步动作录入模块包括kinect传感器和运动识别模块,所述运动识别模块根据kinect采集的深度数据流进行深度图像处理和图像分割获得人体检测结果,根据人体检测结果对身体部位进行分类得到骨架模型进而获取人手末端点的实时位置跟踪信息,并根据kinect采集的彩色视频流进行人脸识别,然后进行颜色和骨架匹配完成用户身份,最后建立d-h坐标系进行正、逆运动学分析,采用插值法对堆垛设备关节空间进行轨迹规划,并利用空间向量法计算出各个关节的转角通过无线方式发送给决策分析模块,再通过can总线将控制信号输入到电机驱动器中,完成堆垛设备对双臂动作的模拟;
14.远程智能控制模块包括三维建模模块和控制信息录入模块,所述三维建模模块用于对堆垛设备进行设备建模、渲染和运动建模得到堆垛设备的3d控制模型,所述控制信息录入模块用于用户输入对3d控制模型的控制参数信息,并通过无线方式发送给决策分析模块控制堆垛机器人运动。
15.进一步地,所述抖动控制模块包括检测堆垛设备角度变化信息的角度传感器及振动传感器和用于抖动补偿的补偿模块,所述角度传感器及振动传感器与所述补偿模块电连接,所述补偿模块对采集的数据进行数据变换和高通滤波处理,并根据计算力矩法计算出各关节的补偿量值,再将补偿量值传输给运动控制机构的各防抖电机驱动器,由防抖电机驱动器控制防抖装置的防抖电机进行各关节变量的调整,从而完成一次抖动补偿。
16.进一步地,所述运动控制机构包括用于控制堆垛设备户进行升降、行走和叉货运动的多个电机驱动模块和can卡,每个电机驱动模块包括电机、电机驱动器、减速器、超声波传感器和红外传感器,所述电机和所述减速器均与所述电机驱动器电连接,所述电机驱动器、所述超声波传感器和所述红外传感器均通过所述can卡与所述决策分析模块电连接,所述超声波传感器和所述红外传感器用于检测机器人周围是否有障碍物,防止手臂动作时发生碰撞。
17.进一步地,所述安全刹车模块包括急停按钮、mcu控制器、供电控制电路和刹车片,所述急停按钮将急停信号传输至所述mcu控制器,所述mcu控制器与所述供电控制电路电连接,所述供电控制电路包括多个开关管,所述mcu控制器通过控制多个开关管的通断控制所述电机驱动器和所述刹车片的供电通断。
18.进一步地,所述决策分析模块包括无线通信模块和堆垛分析模块,所述无线通信模块用于接收上行控制指令和向远程控制终端反馈动作执行数据,所述堆垛分析模块与所述无线通信模块电连接,所述堆垛分析模块用于根据包裹数量、包装尺寸和运送位置确定堆垛的空间位置、尺寸和堆垛终端的运动路径信息,所述堆垛分析模块的具体步骤包括:
19.s1:预先在包裹上设置标签,所述标签中存储有该包裹的配送信息,读取所述标签存储的所述配送信息,所述配送信息包括包装尺寸和配送位置;
20.s2:根据读取的标签数量获得包裹数量,由包裹数量、包装尺寸和本次堆垛的位置
信息获得本次堆垛操作占用的堆垛空间位置信息,根据用户设定的堆垛空间范围大小和堆垛顺序,确定下一次堆垛的位置信息;
21.s3:根据下一次堆垛的位置坐标信息,利用空间向量法计算出各个关节的转角,再通过can总线将控制信号输入到电机驱动器中,控制电机运动,完成堆垛操作。
22.进一步地,还包括灭火模块,所述灭火模块与所述决策分析模块电连接,所述灭火模块包括火灾检测器、信号处理器、控制器、火灾定位模块和报警装置;所述火灾检测器用于在堆垛过程中检测烟雾信息和温度信息,检测到的模拟信息经过所述信号处理器处理后输出对应的数字信息,将经过滤波和放大处理的数字信息传输至所述控制器,所述控制器将所述数字信息的特征值与对应的预设值进行比较,当烟雾浓度信息对应的特征值大于浓度预设值时或当温度信息对应的特征值高于温度预设值时,则所述控制器发送报警信号至所述报警装置进行报警,所述控制器接收所述火灾定位模块发送的火灾位置信息,根据所述位置信息发送灭火信号至所述灭火模块,所述灭火模块控制灭火装置喷射泡沫灭火剂。
23.更进一步地,所述火灾定位模块包括图像采集器、启动电路和图像识别器,所述图像采集器包括两个平行设置的单目摄像头,所述图像采集器通过所述启动电路与所述控制器电连接,所述启动电路用于触发所述图像采集器进行图像采集,所述图像采集器将采集的两幅不同角度的图像信息发送至所述图像识别器,所述图像识别器根据图像信息提取火源特征信息,进行火源定位,并将定位的火源空间信息发送给控制器。
24.从上述的技术方案可以看出,本发明的有益效果是:本发明可根据用户需求对进行多样化的堆垛操作,采用防抖补偿方式使得堆垛更加精准和安全。
25.除了上面所描述的目的、特征和优点之外,下文中将结合附图对实施本发明的最优实施例进行更详尽的描述,以便能容易地理解本发明的特征和优点。
附图说明
26.为了更清楚地说明本发明实施例或现有技术中的技术方案,下文将对本发明实施例或现有技术描述中所需要使用的附图作简单地介绍,其中,附图仅仅用于展示本发明的一些实施例,而非将本发明的全部实施例限制于此。
27.图1为本发明物流包裹智能堆垛装置的组成结构示意图。
28.图2为本发明中多功能交互模块的组成结构示意图。
29.图3为本发明中抖动控制模块块的组成结构示意图。
30.图4为本发明中运动控制机构的组成结构示意图
31.图5为本发明中安全刹车模块的组成结构示意图。
32.图6为本发明中灭火模块的组成结构示意图。
33.图7为本实施例中堆垛分析过程的具体步骤示意图。
具体实施方式
34.为了使得本发明的技术方案的目的、技术方案和优点更加清楚,下文中将结合本发明具体实施例的附图,对本发明实施例的技术方案进行清楚、完整地描述。附图中相同的附图标记代表相同的部件。需要说明的是,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员在无需创造性劳动
的前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.本技术公开了一种物流包裹智能堆垛装置,如图1至图7所示,该系统包括:多功能交互模块、抖动控制模块、运动控制机构、安全刹车模块和决策分析模块以及灭火模块,其中,所述多功能交互模块用于与管理人员进行语音交互、并录入模仿动作信息和远程手动控制信息。
36.具体地,所述多功能交互模块包括语音交互模块、同步动作录入模块和远程智能控制模块,其中,所述语音交互模块包括语音录入装置和语音播放装置,所述语音录入装置包括用于录入工作人员语音信息的拾音咪头、用于对语音信息进行滤波处理的音频滤波器和语音识别器,拾音咪头与所述音频滤波器电连接,所述拾音咪头将录入的语音信息输入音频滤波器,经过音频滤波器输出滤波处理后的语音信号,将语音信号输入所述语音识别器,所述语音识别器对语音信号进行音频特征提取,采用基于深度学习的方法对提取的音频特征进行分析,得出语音识别结果,将所述语音识别结果发送至所述决策分析模块,决策分析模块根据语音指令控制运动机构进行运动,并发送语音控制信号至所述语音播放装置,所述语音播放装置用于播放设定的语音对话信息。
37.在本实施例中,还可在堆垛设备前方安装人体感应模块,例如热释红外感应器等,当人体靠近时可以主动打招呼或者对话,语音播放装置具体可由语音合成芯片和扬声器等硬件实现。
38.所述同步动作录入模块用于录入工作人员的动作图像信息,并进行动作分析,基于分析结果获得运动参数,将所述运动参数传输至决策分析模块,所述同步动作录入模块包括kinect传感器和运动识别模块,所述运动识别模块根据kinect采集的深度数据流进行深度图像处理和图像分割获得人体检测结果,根据人体检测结果对身体部位进行分类得到骨架模型进而获取人手末端点的实时位置跟踪信息,并根据kinect采集的彩色视频流进行人脸识别,然后进行颜色和骨架匹配完成用户身份,最后建立d-h坐标系进行正、逆运动学分析,采用插值法对堆垛设备关节空间进行轨迹规划,并利用空间向量法计算出各个关节的转角通过无线方式发送给决策分析模块,再通过can总线将控制信号输入到电机驱动器中,完成堆垛设备对双臂动作的模拟。
39.在本实施例中,体感设备kinect前端由3个摄像头组成,中间的是用来采集彩色图像的彩色摄影机,而位于两侧的则是由红外发射器与cmos摄影机组合形成的3d结构光深度感应器,用来实现深度数据的采集,kinect对深度数据流进行处理可实现骨骼跟踪功能,对彩色视频流进行处理可实现身份识别功能。用户可通过双臂摆动实现堆垛或者抓取货物的动作,进而将动作信息传输至运动识别模块,得到运动参数后实现堆垛设备模仿人体动作的操作。
40.远程智能控制模块包括三维建模模块和控制信息录入模块,所述三维建模模块用于对堆垛设备进行设备建模、渲染和运动建模得到堆垛设备的3d控制模型,所述控制信息录入模块用于用户输入对3d控制模型的控制参数信息,并通过无线方式发送给决策分析模块控制堆垛机器人运动。用户可通过可触摸显示屏对3d控制模型直接进行精确的动作控制。
41.所述抖动控制模块与所述决策分析模块电连接,所述抖动控制模块用于检测堆垛设备的角度变化信息,按照设定规则进行补偿分析,获得抖动补偿信息,抖动平衡机构依据
抖动补偿信息进行平衡控制。
42.所述抖动控制模块包括检测堆垛设备角度变化信息的角度传感器及振动传感器和用于抖动补偿的补偿模块,所述角度传感器及振动传感器与所述补偿模块电连接,所述补偿模块对采集的数据进行倾角变换和高通滤波处理等,并根据计算力矩法计算出各关节的补偿量值,再将补偿量值传输给运动控制机构的各防抖电机驱动器,由防抖电机驱动器控制防抖装置的防抖电机进行各关节变量的调整,例如,进行俯仰、左右或者横滚补偿运动补偿,从而完成一次抖动补偿。其中,高通滤波处理是为了提取传感器数据中的抖动信号成分,由于运动过程中处于频率较低的抖动时,其位姿变化对运动过程或者各图像采集设备的影响较小,不易察觉,仅在频率高于一定值时才为真正的抖动量。
43.所述运动控制机构与所述决策分析模块电连接,所述运动控制机构用于接收运动控制指令,根据控制指令控制堆垛装置的运动机构完成指定动作。所述运动控制机构包括用于控制堆垛设备户进行升降、行走和叉货运动的多个电机驱动模块和can卡,每个电机驱动模块包括电机、电机驱动器、减速器、超声波传感器和红外传感器,所述电机和所述减速器均与所述电机驱动器电连接,所述电机驱动器、所述超声波传感器和所述红外传感器均通过所述can卡与所述决策分析模块电连接,所述超声波传感器和所述红外传感器用于检测机器人周围是否有障碍物,防止手臂动作时发生碰撞。
44.所述安全刹车模块与所述运动控制机构电连接,所述安全刹车模块用于在紧急情况下进行主动刹车保护。所述安全刹车模块包括急停按钮、mcu控制器、供电控制电路和刹车片,所述急停按钮将急停信号传输至所述mcu控制器,所述mcu控制器与所述供电控制电路电连接,所述供电控制电路包括多个开关管,所述mcu控制器通过控制多个开关管的通断控制所述电机驱动器和所述刹车片的供电通断。
45.所述决策分析模块用于接收上行控制指令,确定堆垛方案,依据方案输出运动控制指令,并向远程控制终端反馈动作执行数据。所述决策分析模块包括无线通信模块和堆垛分析模块,所述无线通信模块用于接收上行控制指令和向远程控制终端反馈动作执行数据,所述堆垛分析模块与所述无线通信模块电连接,所述堆垛分析模块用于根据包裹数量、包装尺寸和运送位置确定堆垛的空间位置、尺寸和堆垛终端的运动路径信息。在本实施例中,堆垛设备的决策分析模块由mini pc实现,其通过can卡向各个电机驱动器发送控制信号进而控制各伺服电机完成动作。
46.所述堆垛分析模块的具体步骤包括:
47.s1:预先在包裹上设置标签,所述标签中存储有该包裹的配送信息,读取所述标签存储的所述配送信息,所述配送信息包括包装尺寸和配送位置;
48.s2:根据读取的标签数量获得包裹数量,由包裹数量、包装尺寸和本次堆垛的位置信息获得本次堆垛操作占用的堆垛空间位置信息,根据用户设定的堆垛空间范围大小和堆垛顺序,确定下一次堆垛的位置信息;
49.s3:根据下一次堆垛的位置坐标信息,利用空间向量法计算出各个关节的转角,再通过can总线将控制信号输入到电机驱动器中,控制电机运动,完成堆垛操作。
50.在本装置中,所述灭火模块与所述决策分析模块电连接,所述灭火模块包括火灾检测器、信号处理器、控制器、火灾定位模块和报警装置;所述火灾检测器用于在堆垛过程中检测烟雾信息和温度信息,检测到的模拟信息经过所述信号处理器处理后输出对应的数
字信息,将经过滤波和放大处理的数字信息传输至所述控制器,所述控制器将所述数字信息的特征值与对应的预设值进行比较,当烟雾浓度信息对应的特征值大于浓度预设值时或当温度信息对应的特征值高于温度预设值时,则所述控制器发送报警信号至所述报警装置进行报警,所述控制器接收所述火灾定位模块发送的火灾位置信息,根据所述位置信息发送灭火信号至所述灭火模块,所述灭火模块控制灭火装置喷射泡沫灭火剂。
51.具体地,所述火灾定位模块包括图像采集器、启动电路和图像识别器,所述图像采集器包括两个平行设置的单目摄像头,所述图像采集器通过所述启动电路与所述控制器电连接,所述启动电路用于触发所述图像采集器进行图像采集,所述图像采集器将采集的两幅不同角度的图像信息发送至所述图像识别器,所述图像识别器根据图像信息提取火源特征信息,进行火源定位,并将定位的火源空间信息发送给控制器。
52.在本实施例中,进行火源定位的具体步骤包括:
53.s1:获取两幅不同图像的火源特征信息,采用基于双目定位算法的位置计算方法得到火灾的第一三维空间坐标(x1,y1,z1);
54.s2:通过控制火灾定位模块的电机转动进而带动图像采集器转动,当采集图像中火源中心到达左边缘时,记火源区域的中心坐标记为(i1,j1),并计算火灾的第二三维空间坐标(x2,y2,z2),继续转动,当采集图像中火源中心到达右边缘时,记火源区域的中心坐标记为(i2,j2),计算得到火灾的第三三维空间坐标(x3,y3,z3);
55.s3:为第一三维空间坐标、第二三维空间坐标和第三三维空间坐标分别分配权重信息w1、w2和w3,w1+w2+w3=1,根据权重信息则可得三维空间的预测值。
56.应当说明的是,本发明所述的实施方式仅仅是实现本发明的优选方式,对属于本发明整体构思,而仅仅是显而易见的改动,均应属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1