高效自动Demura设备的制作方法
高效自动demura设备
技术领域
1.本发明涉及demura技术领域,特别涉及一种高效自动demura设备。
背景技术:
2.近年来,随着电子产品的迅速普及,消费者对显示屏的画面要求也越来越高。显示屏由于生产工艺复杂,管控难度大,在生产的过程中容易造成mura现象(亮度不均匀),出现亮点或暗点,即显示屏的某个区域由于显示亮度的差异造成的区块状的痕迹现象,降低显示屏的质量等级。为了消除上述mura现象,demura(消除显示屏亮度不均)技术应运而生。demura技术一般通过亮度补偿的方式以矫正显示屏中的显示亮度,进而消除mura现象。现有技术中的demura设备,其有的上料速度较慢,影响显示屏的demura效率,有的结构比较臃肿,导致占用较大加工场地。
3.故需要提供一种高效自动demura设备来解决上述技术问题。
技术实现要素:
4.本发明提供一种高效自动demura设备,以解决现有技术中的demura设备,其有的上料速度较慢,影响显示屏的demura效率,有的结构比较臃肿,导致占用较大加工场地的技术问题。
5.为解决上述技术问题,本发明的技术方案为:
6.一种高效自动demura设备,用于对显示屏进行demura操作,所述高效自动demura设备包括上料系统、补偿系统和下料系统;
7.所述上料系统包括初始上料机构和上料中转机构,用于将位于进料承载盘上的待进行demura操作的显示屏输送至所述补偿系统;
8.所述补偿系统,用于对所述所述上料系统输入的显示屏进行demura操作,并将demura操作后的显示屏输送至所述下料系统;
9.所述下料系统,用于将完成demura操作后的显示屏输送至出料承载盘上;
10.所述初始上料机构包括上料取料装置,所述上料取料装置包括用于输送显示屏的上料取料机械手;
11.所述上料中转机构与所述初始上料机构相邻设置,其包括:
12.第一上料中转单元,其包括依次分布的第一上料中转模块、第一上料转交模块和第一上料模块,均呈直线形,所述第一上料中转模块和所述第一上料模块互相平行,所述第一上料转交模块垂直设置在所述第一上料中转模块和所述第一上料模块之间;所述第一上料中转模块包括滑动设置的第一上料中转平台,所述第一上料中转平台在其滑动方向上包括第一上料承接位和第一上料中转位,所述第一上料中转平台用于承接所述上料取料机械手输送的显示屏,并由所述第一上料承接位输送至所述第一上料中转位;所述第一上料转交模块包括滑动设置的第一上料转交机械手,所述第一上料转交机械手在其滑动方向上包括第一上料转交上料位和第一上料转交下料位,所述第一上料转交机械手用于承接所述第
一上料中转平台输送的显示屏,并由所述第一上料转交上料位输送至所述第一上料转交下料位;所述第一上料模块包括水平方向和竖直方向滑动设置的第一上料平台,所述第一上料平台在其水平滑动轨迹上包括用于低位上料的第一上料低位,在其竖直滑动轨迹上包括用于高位上料的第一上料高位,且所述第一上料低位相对于所述第一上料高位靠近所述第一上料转交模块;
13.第二上料中转单元,其与所述第一上料中转单元相对设置,其包括依次分布的第二上料中转模块、第二上料转交模块和第二上料模块,均呈直线形,所述第二上料中转模块和所述第二上料模块互相平行,所述第二上料转交模块垂直设置在所述第二上料中转模块和所述第二上料模块之间;所述第二上料中转模块包括滑动设置的第二上料中转平台,所述第二上料中转平台在其滑动方向上包括第二上料承接位和第二上料中转位,且所述第二上料承接位与所述第一上料承接位互相靠近,所述第二上料中转位与所述第一上料中转位互相远离,所述第二上料中转平台用于承接所述上料取料机械手输送的显示屏,并由所述第二上料承接位输送至所述第二上料中转位;所述第二上料转交模块包括滑动设置的第二上料转交机械手,所述第二上料转交机械手在其滑动方向上包括第二上料转交上料位和第二上料转交下料位,所述第二上料转交机械手用于承接所述第二上料中转平台输送的显示屏,并由所述第二上料转交上料位输送至所述第二上料转交下料位;所述第二上料模块包括水平方向和竖直方向滑动设置的第二上料平台,所述第二上料平台在其水平滑动轨迹上包括用于低位上料的第二上料低位,在其竖直滑动轨迹上包括用于高位上料的第二上料高位,且所述第二上料低位相对于所述第二上料高位靠近所述第二上料转交模块;以及,
14.上料中转承载架,所述第一上料中转单元和所述第二上料中转单元均设置在所述上料中转承载架上。
15.本发明相较于现有技术,其有益效果为:本发明提供的高效自动demura设备,其通过上料中转机构可以对四条demura工段进行上料,提高了工作效率,同时其结构紧凑,占用生产场地较小。
附图说明
16.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面对实施例中所需要使用的附图作简单的介绍,下面描述中的附图仅为本发明的部分实施例相应的附图。
17.图1为本发明的高效自动demura设备的结构框图。
18.图2为本发明的高效自动demura设备的上料系统的俯视结构示意图。
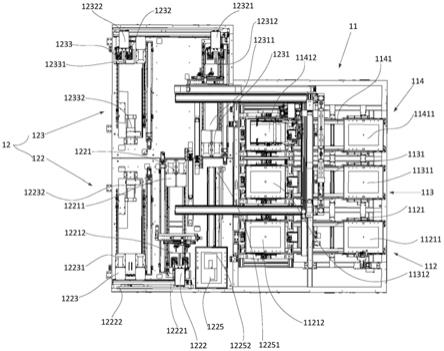
19.图3为本发明的高效自动demura设备的上料系统的立体结构示意图。
20.图4为图3中a部分的放大结构示意图。
21.图5为图3中b部分的放大结构示意图。
22.图6为本发明的高效自动demura设备的补偿系统的mura缺陷补偿器的结构示意图。
23.图7为本发明的高效自动demura设备的下料系统的立体结构示意图。
24.图8为本发明的高效自动demura设备上下料的显示屏放置在承载盘里的结构示意图。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.本发明中所提到的方向用语,例如「上」、「下」、「前」、「后」、「左」、「右」、「内」、「外」、「侧面」、「顶部」以及「底部」等词,仅是参考附图的方位,使用的方向用语是用以说明及理解本发明,而非用以限制本发明。
27.本发明术语中的“第一”“第二”等词仅作为描述目的,而不能理解为指示或暗示相对的重要性,以及不作为对先后顺序的限制。
28.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
29.demura技术是一种消除显示屏mura使画面亮度均匀的技术。demura技术的基本原理是让显示屏显示灰阶画面,用电容耦合器件(charge coupled device,ccd)拍摄显示屏,获取显示屏中各像素点的亮度值,然后调整mura区域的像素点的灰阶值或者电压,使过暗的区域变亮、过亮的区域变暗,达到均匀的显示效果。
30.现有技术中的demura设备,其有的上料速度较慢,影响显示屏的demura效率,有的结构比较臃肿,导致占用较大加工场地。
31.如下为本发明提供的一种能解决以上技术问题的上高效自动demura设备的优选实施例。
32.请参照图1和图8,本发明提供一种高效自动demura设备,用于对显示屏进行demura,且显示屏200呈长方形,其宽边的一端有一条凸出的fpc300。高效自动demura设备包括上料系统、补偿系统13和下料系统。上料系统用于将位于进料承载盘上的待进行demura操作的显示屏输送至补偿系统,补偿系统用于对上料系统输入的显示屏进行demura操作,并将demura操作后的显示屏输送至下料系统,下料系统用于将完成demura操作后的显示屏输送至出料承载盘上。其中上料系统包括初始上料机构11和上料中转机构12,下料系统包括下料中转机构14和终端下料机构15。
33.一、用于对显示屏200进行上料的初始上料机构11(请参照图2、图3、图4和图8)。
34.初始上料机构11包括初始上料承载架111、满承载盘传输模块112、第一空承载盘传输模块113、第二空承载盘传输模块114、上料取料装置和满承载盘搬运结构116。初始上料承载架111水平设置,满承载盘传输模块112、第一空承载盘传输模块113和第二空承载盘传输模块114沿初始上料承载架111的长度方向依次设置在初始上料承载架111上。
35.四块显示屏200放置在承载盘100里进行上料,且承载盘100呈长方形,四块显示屏200呈2*2两两对称分布。四块显示屏200的长度方向与承载盘100的长度方向一致,每块显示屏200上的fpc300均朝向与它相对的那块显示屏200。需要说明的是,承载盘100和显示屏200不局限于长方形,可以是便于使用的任何形状,为了便于描述,将其均描述为长方形。
36.满承载盘传输模块112包括满承载盘传输流水线1121和满承载盘升降平台1122。
37.满承载盘传输流水线1121的长度方向与初始上料承载架111的宽度方向一致。满承载盘传输流水线1121在其输送方向上包括满承载盘上料位11211和满承载盘上升位11212。满承载盘上料位11211用于放置装有显示屏200的多个满的承载盘100,满承载盘传输流水线1121用于将多个满的承载盘100从满承载盘上料位11211输送至满承载盘上升位11212。满承载盘传输流水线1121可以设置为传动轮与传送带组合的传送结构,也可以设置为滑轨传送的结构。满承载盘上料位11211的上方设置有用于对所有满的承载盘100进行整体扫码的扫码器。
38.满承载盘升降平台1122沿竖直方向滑动设置在满承载盘上升位11212的上方,用于将位于满承载盘上升位11212的多个满的承载盘100逐个升高。满承载盘升降平台1122的上方设置有对满的承载盘100进行逐个矫正的矫正装置,该矫正装置的四个矫正块对应承载盘100的四个边。
39.第一空承载盘传输模块113包括第一空承载盘传输流水线1131和第一空承载盘升降平台1132。
40.第一空承载盘传输流水线1131与满承载盘传输流水线1121相邻且平行设置,第一空承载盘传输流水线1131在其输送方向上包括第一空承载盘下料位11311和第一空承载盘下降位11312。第一空承载盘下降位11312与满承载盘上升位11212相邻,第一空承载盘下料位11311与满承载盘上料位11211相邻,第一空承载盘传输流水线1131用于将位于第一空承载盘下降位11312的空的承载盘100输送至第一空承载盘下料位11311。
41.第一空承载盘升降平台1132沿竖直方向滑动设置在第一空承载盘下降位11312的上方,用于逐个承接满承载盘升降平台1122升高的满的承载盘100,待满的承载盘100里的显示屏200被取走后,将空的承载盘100逐个下降至第一空承载盘下降位11312。第一空承载盘升降平台1132的上方设置有对承载盘100进行逐个矫正的矫正装置,矫正装置的四个矫正块对应承载盘100的四个边。第一空承载盘升降平台1132的上方还设置有对承载盘100进行逐个扫码的扫码器,以及用于识别承载盘100里显示屏200位置的第一ccd上料视觉系统和第一上料红外灯光。
42.第二空承载盘传输模块114包括第二空承载盘传输流水线1141和第二空承载盘升降平台1142。
43.第二空承载盘传输流水线1141与第一空承载盘传输流水线1131相邻且平行设置,第二空承载盘传输流水线1141在其输送方向上包括第二空承载盘下料位11411和第二空承载盘下降位11412。第二空承载盘下降位11412与第一空承载盘下降位11312相邻,第二空承载盘下料位11411与第一空承载盘下料位11311相邻,第二空承载盘传输流水线1141用于将位于第二空承载盘下降位11412的空的承载盘100输送至第二空承载盘下料位11411。
44.第二空承载盘升降平台1142沿竖直方向滑动设置在第二空承载盘下降位11412的上方,用于逐个承接满承载盘升降平台1122升高的满的承载盘100,待满的承载盘100里的显示屏200被取走后,将空的承载盘100逐个下降至第二空承载盘下降位11412。第二空承载盘升降平台1142的上方设置有对承载盘100进行逐个矫正的矫正装置,矫正装置的四个矫正块对应承载盘100的四个边。第二空承载盘升降平台1142的上方还设置有对承载盘100进行逐个扫码的扫码器,以及用于识别承载盘100里显示屏200位置的第二ccd上料视觉系统
和第二上料红外灯光。
45.满承载盘搬运结构116滑动设置在满承载盘升降平台1122、第一空承载盘升降平台1132和第二空承载盘升降平台1142的上方,用于将满承载盘升降平台1122升高的满的承载盘100分别逐个搬运至第一空承载盘升降平台1132和第二空承载盘升降平台1142上。
46.上料取料装置包括上料取料龙门架和上料取料机械手115。上料取料龙门架竖直方向设置在初始上料承载架111上,上料取料机械手115沿xyz方向滑动设置在上料取料龙门架上,上料取料机械手115用于将第一空承载盘升降平台1132和第二空承载盘升降平台1142上的承载盘100里的显示屏200取走。上料取料机械手115可以设置为一个,也可以设置为两个。当设置为两个时,分别对应取第一空承载盘升降平台1132上的显示屏200和第二空承载盘升降平台1142上的显示屏200。
47.上料取料机械手115包括上料取料主体部1151、上料取料转动轴1152、上料取料连接板1153和两组上料取料吸附组件1154。上料取料主体部1151滑动设置在上料取料龙门架上,上料取料转动轴1152的一端与上料取料主体部1151转动连接,另一端与上料取料连接板1153的中部连接。上料取料吸附组件1154用于吸附显示屏200和fpc300,两组上料取料吸附组件1154对称设置在上料取料连接板1153的两端,且设置在上料取料连接板1153远离上料取料转动轴1152的一侧。该结构的上料取料转动轴1152使得上料取料吸附组件1154可旋转,以便根据显示屏200的偏移角度,调整至合适的位置后再吸附显示屏200。
48.上料取料吸附组件1154包括上料取料固定片11541、上料取料连接片11542、上料取料转动片11543和多个上料取料吸头11544。上料取料固定片11541呈长方形,其与上料取料连接板1153的端部连接,且水平设置。上料取料固定片11541上设置有多个平行的长条形的上料取料固定孔,上料取料固定孔的长度方向与上料取料固定片11541的长度方向一致。上料取料吸头11544活动设置在上料取料固定孔中。上料取料固定片11541上的上料取料吸头11544用于吸附显示屏200。上料取料连接片11542与上料取料固定片11541的一角可拆卸固定连接。上料取料连接片11542沿其长度方向上设置有多个安装孔。上料取料转动片11543通过上料取料连接片11542上的安装孔与上料取料连接片11542转动连接。上料取料转动片11543上设置有长条形的上料取料定位孔,上料取料吸头11544活动设置在上料取料定位孔中。上料取料转动片11543上的上料取料吸头11544用于吸附fpc300。该结构使得上料取料固定片11541上的上料取料吸头11544可以根据显示屏200的尺寸调整相应上料取料吸头11544的位置,且上料取料转动片11543上的上料取料吸头11544可以根据fpc300的位置和尺寸调整相应上料取料吸头11544的位置。
49.上料取料机械手115还包括多个第一上料接气头1155和多个第二上料接气头1156,均用于通过气管与上料取料吸头11544连接,给上料取料吸头11544供气。多个第一上料接气头1155分布在上料取料主体部1151上,且多个第一上料接气头1155设置为对称分布的两组。其中一组第一上料接气头1155靠近其中一组上料取料吸附组件1154,用于给该组上料取料吸附组件1154的上料取料吸头11544供气,另一组第一上料接气头1155靠近另一组上料取料吸附组件1154,用于给该组上料取料吸附组件1154的上料取料吸头11544供气。多个第二上料接气头1156分布在上料取料连接板1153上,且多个第二上料接气头1156与上料取料转动轴1152位于上料取料连接板1153的同一侧。多个第二上料接气头1156设置为对称分布的两组,其中一组第二上料接气头1156靠近其中一组上料取料吸附组件1154,用于
给该组上料取料吸附组件1154的上料取料吸头11544供气,另一组第二上料接气头1156靠近另一组上料取料吸附组件1154,用于给该组上料取料吸附组件1154的上料取料吸头11544供气。上述结构可以根据需要选择上料取料吸头11544接到第一上料接气头1155,还是接到第二上料接气头1156。并且当选择第一上料接气头1155时,每组上料取料吸附组件1154的上料取料吸头11544可以选择离得近的一组第一上料接气头1155;当选择第二上料接气头1156时,每组上料取料吸附组件1154的上料取料吸头11544可以选择离得近的一组第二上料接气头1156。
50.上料取料机械手115还包括两组上料取料缠线组件1157,上料取料缠线组件1157包括上料取料固定板11571和上料取料缠绕片11572。两个上料取料固定板11571分别沿竖直方向设置在上料取料连接板1153的两端,与上料取料转动轴1152位于上料取料连接板1153的同一侧。上料取料固定板11571的一端与上料取料连接板1153的一端连接,另一端沿其长度方向设置有多个安装孔。上料取料缠绕片11572包括依次连接的上料取料连接部、上料取料缠绕部和上料取料限位部。上料取料连接部的一端通过上料取料固定板11571的安装孔与上料取料固定板11571可拆卸连接,上料取料连接部的另一端与上料取料缠绕部的一端垂直连接。上料取料缠绕部用于缠绕与上料取料吸头11544连接的气管。上料取料缠绕部的另一端与上料取料限位部垂直连接,且上料取料限位部向靠近上料取料固定板11571的方向延伸。上述结构可以将与上料取料吸头11544连接的气管缠绕在上料取料缠绕部上,并通过上料取料限位部对与上料取料吸头11544连接的气管进行限位,使得与上料取料吸头11544连接的气管不易干扰其他部件,避免造成机器故障。同时,上料取料固定板11571的另一端沿其长度方向设置有多个安装孔,可以根据与上料取料吸头11544连接的气管的长度调整上料取料缠绕片11572的高度。
51.初始上料机构11对显示屏200进行上料的流程如下:
52.1.1、将多个满的承载盘100通过人工/agv/oht模式叠放在满承载盘传输流水线1121的满承载盘上料位11211,位于满承载盘上料位11211上方的扫码器对所有承载盘100进行整体扫码,扫码结束后,满承载盘传输流水线1121将多个满的承载盘100沿水平方向输送到满承载盘上升位11212;
53.1.2、满承载盘升降平台1122将位于满承载盘上升位11212的最上方的满的承载盘100升高至上方的矫正装置,该矫正装置对升高的满的承载盘100进行矫正;
54.1.3、满承载盘搬运结构116将满承载盘升降平台1122矫正后的满的承载盘100搬运至位于第一空承载盘下降位11312上方的第一空承载盘升降平台1132上;
55.1.4、位于第一空承载盘升降平台1132上方的矫正装置对承载盘100进行再次矫正;
56.1.5、位于第一空承载盘升降平台1132上方的扫码器对承载盘100进行单个扫码;
57.1.6、开启位于第一空承载盘升降平台1132上方的第一ccd上料视觉系统和第一上料红外灯光,根据第一ccd上料视觉系统的检测参数,上料取料机械手115旋转至合适的角度,使上料取料固定片11541上的上料取料吸头11544和上料取料转动片11543上的上料取料吸头11544分别对应显示屏200和fpc300合适的位置,并将承载盘100里的显示屏200取走;
58.1.7、空的承载盘100通过第一空承载盘升降平台1132下降至第一空承载盘下降位
11312;
59.1.8、当位于第一空承载盘下降位11312的空的承载盘100达到一定的数量后,第一空承载盘传输流水线1131将位于第一空承载盘下降位11312的空的承载盘100输送至第一空承载盘下料位11311;
60.1.9、满承载盘搬运结构116将满承载盘升降平台1122矫正后的满的承载盘100搬运至位于第二空承载盘下降位11412上方的第二空承载盘升降平台1142上,满承载盘搬运结构116交替执行该步骤和步骤1.3;
61.1.10、位于第二空承载盘升降平台1142上方的矫正装置对承载盘100进行再次矫正;
62.1.11、位于第二空承载盘升降平台1142上方的扫码器对承载盘100进行单个扫码;
63.1.12、开启位于第二空承载盘升降平台1142上方的第二ccd上料视觉系统和第二上料红外灯光,根据第二ccd上料视觉系统的检测参数,上料取料机械手115旋转至合适的角度,使上料取料固定片11541上的上料取料吸头11544和上料取料转动片11543上的上料取料吸头11544对应显示屏200和fpc300合适的位置,并将承载盘100里的显示屏200取走,上料取料机械手115交替执行该步骤和步骤1.6;
64.1.13、空的承载盘100通过第二空承载盘升降平台1142下降至第二空承载盘下降位11412;
65.1.14、当位于第二空承载盘下降位11412的空的承载盘100达到一定的数量后,第二空承载盘传输流水线1141将位于第二空承载盘下降位11412的空的承载盘100输送至第二空承载盘下料位11411。
66.重复执行上述步骤。
67.二、用于对显示屏200进行分流的上料中转机构12(请参照图2、图3、图5和图8)
68.上料中转机构12包括上料中转承载架121、第一上料中转单元122和第二上料中转单元123。
69.第一上料中转单元122包括第一上料中转模块、第一上料转交模块、第一上料模块和上料ng输送模块。
70.上料中转承载架121水平设置,其与初始上料承载架111连接,且其长度方向与初始上料承载架111的长度方向一致。第一上料中转单元122和第二上料中转单元123沿上料中转承载架121的长度方向相对设置。
71.第一上料中转模块包括第一上料中转滑轨和第一上料中转平台1221。第一上料中转滑轨呈直线形,其沿上料中转承载架121的长度方向水平设置。第一上料中转平台1221滑动设置在第一上料中转滑轨上,第一上料中转平台1221在其滑动方向上包括第一上料承接位12211和第一上料中转位12212,且第一上料承接位12211相对于第一上料中转位12212靠近第一空承载盘下降位11312。当第一上料中转平台1221位于第一上料承接位12211时,第一上料中转平台1221用于承接上料取料机械手115取走的第一空承载盘升降平台1132上的承载盘100里的显示屏200,并将显示屏200从第一上料承接位12211输送至第一上料中转位12212。第一上料中转滑轨的上方还设置有产品除静电装置,用于对第一上料中转平台1221上的显示屏200除静电。
72.第一上料转交模块包括第一上料转交滑轨和第一上料转交机械手1222。第一上料
转交滑轨呈直线形,其水平设置在上料中转承载架121上,且与第一上料中转滑轨垂直。第一上料转交机械手1222滑动设置在第一上料中转滑轨上,第一上料转交机械手1222在其滑动方向上包括第一上料转交上料位12221和第一上料转交下料位12222,且第一上料转交上料位12221相对于第一上料转交下料位12222靠近第一上料中转位12212。当第一上料转交机械手1222位于第一上料转交上料位12221时,第一上料转交机械手1222用于取走位于第一上料中转位12212的第一上料中转平台1221上的显示屏200,并输送至第一上料转交下料位12222。
73.第一上料转交机械手1222的具体结构与第二上料转交机械手1232的结构一致,在此不再赘述。
74.第一上料模块包括第一上料组件和第一顶升上料分流组件。
75.第一上料组件包括第一上料滑轨和第一上料平台1223。第一上料滑轨呈直线形,其水平设置在上料中转承载架121上,且与第一上料转交滑轨垂直。第一上料平台1223滑动设置在第一上料滑轨上,第一上料平台1223在其移动轨迹上依次包括第一上料低位12231、第一上料中间位和第一上料高位12232。其中,第一上料低位12231和第一上料中间位位于第一上料平台1223沿第一上料滑轨的滑动轨迹上。当第一上料平台1223位于第一上料低位12231时,第一上料平台1223用于承接第一上料转交机械手1222从第一上料中转平台1221上取走的显示屏200,并用于等待低位上料或依次输送至第一上料中间位和第一上料高位12232。第一上料高位12232位于第一上料中间位的正上方,当第一上料平台1223位于第一上料高位12232时,第一上料平台1223用于高位上料。
76.第一顶升上料分流组件包括第一顶升上料分流滑轨和第一顶升上料分流平台1224。第一顶升上料分流滑轨竖直方向设置在上料中转承载架121上,且位于第一上料滑轨远离第一上料转交滑轨的一端。第一顶升上料分流平台1224滑动设置在第一顶升上料分流滑轨上,当第一上料平台1223位于第一上料中间位时,第一顶升上料分流平台1224位于第一上料平台1223的下方,第一顶升上料分流平台1224用于将第一上料平台1223由第一上料中间位顶起使其位于第一上料高位12232。上述结构使得第一上料平台1223由第一上料低位12231滑动至第一上料高位12232时更加顺畅。
77.第一上料平台1223设置为金属材质,第一顶升上料分流平台1224的表面设置有用于吸住第一上料平台1223的磁铁。该结构可以对第一上料平台1223起到固定作用,防止上升和下降过程中发生移位。
78.上料ng输送模块包括上料ng输送滑轨和上料ng平台1225。上料ng输送滑轨呈直线形,其水平设置在上料中转承载架121上。上料ng输送滑轨与第一上料中转滑轨相邻且平行设置,且上料ng输送滑轨相对于第一上料中转滑轨靠近初始上料机构11。上料ng平台1225滑动设置在ng输送滑轨上,上料ng平台1225在其滑动方向上包括ng承接位12251和ng出料位12252,ng承接位12251与第一上料承接位12211相邻,ng出料位12252与第一上料中转位12212相邻。当上料ng平台1225位于ng承接位12251时,上料ng平台1225用于承接上料取料机械手115输送的第一空承载盘升降平台1132或第二空承载盘升降平台1142扫码失败的承载盘100里的显示屏200,并从ng承接位12251输送至ng出料位12252。上述结构可以对扫码失败的显示屏及时输出。
79.第二上料中转单元123包括第二上料中转模块、第二上料转交模块和第二上料模
块。
80.第二上料中转模块包括第二上料中转滑轨和第二上料中转平台1231。第二上料中转滑轨呈直线形,其沿上料中转承载架121的长度方向水平设置,且与上料ng输送滑轨直线相对。第二上料中转平台1231滑动设置在第二上料中转滑轨上,第二上料中转平台1231在其滑动方向上包括第二上料承接位12311和第二上料中转位12312,且第二上料承接位12311相对于第二上料中转位12312靠近第二空承载盘下降位11412。当第二上料中转平台1231位于第二上料承接位12311时,第二上料中转平台1231用于承接上料取料机械手115取走的第二空承载盘升降平台1142上的承载盘100里的显示屏200,并将显示屏200从第二上料承接位12311输送至第二上料中转位12312。第二上料中转滑轨的上方还设置有产品除静电装置,用于对第二上料中转平台1231上的显示屏200除静电。
81.第二上料转交模块包括第二上料转交滑轨和第二上料转交机械手1232。需要说明的是,图中示意了两个第二上料转交机械手1232,代表第二上料转交机械手1232的两个位置,实际上只有一个第二上料转交机械手1232。第二上料转交滑轨呈直线形,其水平设置在上料中转承载架121上,且与第二上料中转滑轨垂直。第二上料转交机械手1232滑动设置在第二上料中转滑轨上,第二上料转交机械手1232在其滑动方向上包括第二上料转交上料位12321和第二上料转交下料位12322,且第二上料转交上料位12321相对于第二上料转交下料位12322靠近第二上料中转位12312。当第二上料转交机械手1232位于第二上料转交上料位12321时,第二上料转交机械手1232用于取走位于第二上料中转位12312的第二上料中转平台1231上的显示屏200,并输送至第二上料转交下料位12322。
82.第二上料转交机械手1232包括第二上料转交主体部12323和两组第二上料转交吸附组件12324。第二上料转交主体部12323的一端与第二上料转交滑轨滑动连接,另一端与两组第二上料转交吸附组件12324连接。第二上料转交吸附组件12324用于吸附显示屏200和fpc300,第二上料转交吸附组件12324包括第二上料转交固定片123241、第二上料转交连接片123242、第二上料转交转动片123243和多个第二上料转交吸头123244。第二上料转交固定片123241呈长方形,其与第二上料转交主体部12323连接,且水平设置。第二上料转交固定片123241上设置有多个平行的长条形的第二上料转交固定孔,第二上料转交固定孔的长度方向与第二上料转交固定片123241的长度方向一致。部分第二上料转交吸头123244活动设置在第二上料转交固定孔中。第二上料转交固定片123241上的第二上料转交吸头123244用于吸附显示屏200。第二上料转交连接片123242与第二上料转交固定片123241的一角可拆卸固定连接。第二上料转交连接片123242沿其长度方向上设置有多个安装孔。第二上料转交转动片123243通过第二上料转交连接片123242上的安装孔与第二上料转交连接片123242转动连接。第二上料转交转动片123243上设置有长条形的第二上料转交定位孔,部分第二上料转交吸头123244活动设置在第二上料转交定位孔中。第二上料转交转动片123243上的第二上料转交吸头123244用于吸附fpc300。该结构使得第二上料转交固定片123241上的第二上料转交吸头123244可以根据显示屏200的尺寸调整相应第二上料转交吸头123244的位置,且第二上料转交转动片123243上的第二上料转交吸头123244可以根据fpc300的位置和尺寸调整相应第二上料转交吸头123244的位置。第二上料转交连接片123242上的安装孔设置为多个,使得第二上料转交吸头123244的位置调整选择性更多,更好的适应fpc300相对于显示屏200的位置。
83.第二上料模块包括第二上料组件和第二顶升上料分流组件。
84.第二上料组件包括第二上料滑轨和第二上料平台1233。第二上料滑轨呈直线形,其水平设置在上料中转承载架121上,且与第二上料转交滑轨垂直。第二上料平台1233滑动设置在第二上料滑轨上,第二上料平台1233在其移动轨迹上依次包括第二上料低位12331、第二上料中间位和第二上料高位12332。其中,第二上料低位12331和第二上料中间位位于第二上料平台1233沿第二上料滑轨的滑动轨迹上。当第二上料平台1233位于第二上料低位12331时,第二上料平台1233用于承接第二上料转交机械手1232从第二上料中转平台1231上取走的显示屏200,并用于等待低位上料或依次输送至第一上料中间位和第二上料高位12332。第二上料高位12332位于第二上料中间位的正上方,当第二上料平台1233位于第二上料高位12332时,第二上料平台1233用于高位上料。
85.第二顶升上料分流组件包括第二顶升上料分流滑轨和第二顶升上料分流平台1234。第二顶升上料分流滑轨竖直方向设置在上料中转承载架121上,且位于第二上料滑轨远离第二上料转交滑轨的一端。第二顶升上料分流平台1234滑动设置在第二顶升上料分流滑轨上,当第二上料平台1233位于第二上料中间位时,第二顶升上料分流平台1234位于第二上料平台1233的下方,第二顶升上料分流平台1234用于将第二上料平台1233由第二上料中间位顶起使其位于第二上料高位12332。
86.第二上料平台1233设置为金属材质,第二顶升上料分流平台1234的表面设置有用于吸住第二上料平台1233的磁铁。该结构可以对第二上料平台1233起到固定作用,防止上升和下降过程中发生移位。
87.上料中转机构12对显示屏200进行分流的流程如下:
88.2.1、当第一空承载盘传输流水线1131的第一空承载盘下降位11312上放置的为步骤1.5中扫码成功的承载盘100时,上料取料机械手115根据第一ccd上料视觉系统的检测参数旋转一定的角度后,取走其承载盘100里的两片朝向一致的显示屏200,并继续顺时针旋转90度后,放置于位于第一上料承接位12211的第一上料中转平台1221上;
89.2.2、位于第一上料承接位12211的第一上料中转平台1221承接上料取料机械手115输送的扫码成功的承载盘100里的显示屏后,第一上料中转平台1221由第一上料承接位12211滑动至第一上料中转位12212;
90.2.3、位于第一上料转交上料位12221的第一上料转交机械手1222将位于第一上料中转位12212的第一上料中转平台1221上的两片显示屏200取走,并滑动至第一上料转交下料位12222,并将显示屏200放置于位于第一上料低位12231的第一上料平台1223上;
91.2.4、第一上料平台1223承接显示屏200后,由第一上料低位12231滑动至第一上料中间位;
92.2.5、第一顶升上料分流平台1224将位于第一上料中间位的第一上料平台1223顶起至第一上料高位12232,等待高位上料;
93.2.6、位于第一上料中转位12212的第一上料中转平台1221上的两片显示屏200被取走后,第一上料中转平台1221再次回到第一上料承接位12211;
94.2.7、上料取料机械手115执行完步骤2.1后,逆时针旋转90度回到初始位置后,再次根据第一ccd上料视觉系统的检测参数旋转一定的角度后,取走第一空承载盘传输流水线1131的第一空承载盘下降位11312上的承载盘100里的剩余的两片朝向一致的显示屏
200,并继续逆时针旋转90度后放置于再次回到第一上料承接位12211的第一上料中转平台1221上;
95.2.8、位于第一上料承接位12211的第一上料中转平台1221再次承接剩余的两片显示屏200后,再次由第一上料承接位12211滑动至第一上料中转位12212;
96.2.9、位于第一上料转交上料位12221的第一上料转交机械手1222再次将位于第一上料中转位12212的第一上料中转平台1221上的两片显示屏200取走,并滑动至第一上料转交下料位12222,并将显示屏200放置于位于第一上料低位12231的第一上料平台1223上,等待低位上料;
97.2.10、当第二空承载盘传输流水线1141的第二空承载盘下降位11412上放置的为步骤1.11中扫码成功的承载盘100时,上料取料机械手115根据第二ccd上料视觉系统的检测参数旋转一定的角度后,取走其承载盘100里的两片朝向一致的显示屏200,并继续顺时针旋转90度后,放置于位于第二上料承接位12311的第二上料中转平台1231上;
98.2.11、位于第二上料承接位12311的第二上料中转平台1231承接上料取料机械手115输送的扫码成功的承载盘100里的显示屏后,第二上料中转平台1231由第二上料承接位12311滑动至第二上料中转位12312;
99.2.12、位于第二上料转交上料位12321的第二上料转交机械手1232将位于第二上料中转位12312的第二上料中转平台1231上的两片显示屏200取走,并滑动至第二上料转交下料位12322,并将显示屏200放置于位于第二上料低位12331的第二上料平台1233上;
100.2.13、第二上料平台1233承接显示屏200后,由第二上料低位12331滑动至第二上料中间位;
101.2.14、第二顶升上料分流平台1234将位于第二上料中间位的第二上料平台1233顶起至第二上料高位12332,等待高位上料;
102.2.15、位于第二上料中转位12312的第二上料中转平台1231上的两片显示屏200被取走后,第二上料中转平台1231再次回到第二上料承接位12311;
103.2.16、上料取料机械手115执行完步骤2.10后,逆时针旋转90度回到初始位置后,根据第二ccd上料视觉系统的检测参数旋转一定的角度后,取走第二空承载盘传输流水线1141的第二空承载盘下降位11412上的承载盘100里的剩余的两片朝向一致的显示屏200,并逆时针旋转90度后放置于再次回到第二上料承接位12311的第二上料中转平台1231上;
104.2.17、位于第二上料承接位12311的第二上料中转平台1231承接显示屏200后,再次由第二上料承接位12311滑动至第二上料中转位12312;
105.2.18、位于第二上料转交上料位12321的第二上料转交机械手1232再次将位于第二上料中转位12312的第二上料中转平台1231上的两片显示屏200取走,并滑动至二上料转交下料位12322,并将显示屏200放置于位于第二上料低位12331的第二上料平台1233上,等待低位上料;
106.2.19、当第一空承载盘传输流水线1131的第一空承载盘下降位11312上放置的为步骤1.5中扫码失败的承载盘100时,上料取料机械手115取走其承载盘100里的显示屏200,放置于位于ng承接位12251的上料ng平台1225上,上料ng平台1225由ng承接位12251滑动至ng出料位12252,进行输送后,再次回到ng承接位12251;
107.2.20、当第二空承载盘传输流水线1141的第二空承载盘下降位11412上放置的为
步骤1.11中扫码失败的承载盘100时,上料取料机械手115取走其承载盘100里的显示屏200,放置于位于ng承接位12251的上料ng平台1225上,上料ng平台1225由ng承接位12251滑动至ng出料位12252,进行输送后,再次回到ng承接位12251。
108.重复执行上述步骤。
109.本发明提供的高效自动demura设备,其通过上料中转机构可以对四条demura工段进行上料,提高了工作效率,同时其结构紧凑,占用生产场地较小。
110.各矫正装置的设置,使得空的承载盘100可以整齐下降输送,同时也可以使得显示屏200处于正确的位置,为下一步的输送做准备,使得显示屏200最终上料时的位置更加精准。
111.三、用于对显示屏进行demura的补偿系统13(请参照图6)
112.补偿系统包括补偿承载架、多个mura缺陷补偿器131和多个mura检测ccd相机。补偿承载架与上料中转承载架相邻设置,多个mura缺陷补偿器131设置在补偿承载架上,用于对显示屏进行demura操作。多个mura检测ccd相机分别对应设置在多个mura缺陷补偿器131的上方,用于拍摄显示屏。
113.mura缺陷补偿器131的下方设置有转动轴,mura缺陷补偿器131沿其转动的周向依次包括上下料工位1311、ic消除工位1312、mura测试工位1313和烧录工位1314,转动轴转动从而使得显示屏依次位于上下料工位1311、ic消除工位1312、mura测试工位1313和烧录工位1314。上下料工位1311用于上下料显示屏,ic消除工位1312用于消除显示屏的ic中的原始数据,mura检测ccd相机设置在mura测试工位1313的上方,mura测试工位1313用于通过mura检测ccd相机对显示屏进行拍照,烧录工位1314用于对显示屏进行数据补偿。
114.上述结构可以多工位同时工作,有效提高了显示屏的demura效率。
115.四、对demura后的显示屏200进行分流的下料中转机构14(请参照图7)
116.下料中转机构14包括下料中转承载架141、第一下料中转单元142和第二下料中转单元143,第一下料中转单元142和第二下料中转单元143沿下料中转承载架141的长度方向对称设置。
117.第一下料中转单元142包括第一下料模块、第一下料转交模块、第一下料中转模块和第一ng缓存平台1425。
118.第一下料模块包括第一下料组件和第一顶升下料分流组件。
119.第一下料组件包括第一下料滑轨和第一下料平台1421。第一下料平台1421滑动设置在第一下料滑轨上,第一下料平台1421在其移动轨迹上依次包括第一下料低位14211、第一下料中间位和第一下料高位14212。
120.第一顶升下料分流组件包括第一顶升下料分流滑轨和第一顶升下料分流平台1422。第一顶升下料分流滑轨竖直方向设置在下料中转承载架141上,且位于第一下料滑轨的一端。
121.第一下料转交模块包括第一下料转交滑轨和第一下料转交机械手1423。第一下料转交机械手1423滑动设置在第一下料中转滑轨上,第一下料中转平台1424在其滑动方向上包括第一下料转交上料位14231和第一下料转交下料位14232,且第一下料转交上料位14231相对于第一下料转交下料位14232靠近第一下料低位14211。
122.第一下料中转模块包括第一下料中转滑轨和第一下料中转平台1424。第一下料中
转平台1424滑动设置在第一下料中转滑轨上,第一下料中转平台1424在其滑动方向上包括第一下料承接位14241和第一下料中转位14242,且第一下料承接位14241相对于第一下料中转位14242靠近第一下料转交下料位14232。第一下料中转位14242的一侧还设置有第一ccd下料视觉系统,其用于对位于第一下料中转位14242的第一下料中转平台1424上的显示屏200的位置进行检测。
123.第一ng缓存平台1425固定设置在第一下料中转位14242远离第一下料承接位14241的一侧,第一ng缓存平台1425用于承接第一下料中转平台1424上的demura失败的显示屏200。
124.第二下料中转单元143包括第二下料模块、第二下料转交模块、第二下料中转模块和第二ng缓存平台1435。
125.第二下料模块包括第二下料组件和第二顶升下料分流组件。
126.第二下料组件包括第二下料滑轨和第二下料平台1431。第二下料平台1431滑动设置在第二下料滑轨上,第二下料平台1431在其移动轨迹上依次包括第二下料低位14311、第二下料中间位和第二下料高位14312。
127.第二顶升下料分流组件包括第二顶升下料分流滑轨和第二顶升下料分流平台1432。第二顶升下料分流滑轨竖直方向设置在下料中转承载架141上,且位于第二下料滑轨的一端。第二顶升下料分流平台1432滑动设置在第二顶升下料分流滑轨上,当第二下料平台1431位于第二下料高位14312时,第二顶升下料分流平台1432位于第二下料平台1431的下方,第二顶升下料分流平台1432用于将第二下料平台1431由第二下料高位14312下降使其位于第二下料中间位。
128.第二下料转交模块包括第二下料转交滑轨和第二下料转交机械手1433。第二下料转交机械手1433滑动设置在第二下料中转滑轨上,第二下料中转平台1434在其滑动方向上包括第二下料转交上料位14331和第二下料转交下料位14332,且第二下料转交上料位14331相对于第二下料转交下料位14332靠近第二下料低位14311。
129.第二下料中转模块包括第二下料中转滑轨和第二下料中转平台1434。第二下料中转平台1434滑动设置在第二下料中转滑轨上,第二下料中转平台1434在其滑动方向上包括第二下料承接位14341和第二下料中转位14342,且第二下料承接位14341相对于第二下料中转位14342靠近第二下料转交下料位14332。第二下料中转位14342的一侧还设置有第二ccd下料视觉系统,其用于对位于第二下料中转位14342的第二下料中转平台1434上的显示屏200的位置进行检测。第二下料中转滑轨的上方还设置有产品除静电装置,用于对第二下料中转平台1434上的显示屏200除静电。
130.第二ng缓存平台1435固定设置在第二下料中转位14342远离第二下料承接位14341的一侧,第二ng缓存平台1435用于承接第二下料中转平台1434上的demura失败的显示屏200。
131.下料中转机构14对demura后的显示屏200进行分流的流程如下:
132.4.1、demura后的显示屏200输送到位于第一下料低位14211的第一下料平台1421上;
133.4.2、第一下料转交机械手1423将位于第一下料低位14211的第一下料平台1421上的显示屏200输送至位于第一下料承接位14241的第一下料中转平台1424上;
134.4.3、位于第一下料承接位14241的第一下料中转平台1424承接显示屏200后,由第一下料承接位14241滑动至第一下料中转位14242,在滑动过程中还通过第一ccd下料视觉系统对第一下料中转平台1424上的显示屏200的位置进行检测;
135.4.4、如果位于第一下料中转位14242的第一下料中转平台1424上的显示屏200为demura成功的,则等待下料,如果位于第一下料中转位14242的第一下料中转平台1424上的显示屏200为demura失败的,则转移到第一ng缓存平台1425上;
136.4.5、位于第一下料低位14211的第一下料平台1421上的显示屏200被取走后,第一下料平台1421由第一下料低位14211滑动至第一下料中间位;
137.4.6、位于第一下料平台1421下方的第一顶升下料分流平台1422上升,使第一下料平台1421由第一下料中间位上升至第一下料高位14212;
138.4.7、demura后的显示屏200输送到位于第一下料高位14212的第一下料平台1421上;
139.4.8、位于第一下料高位14212的第一下料平台1421上承接显示屏200后,位于第一下料平台1421下方的第一顶升下料分流平台1422下降,使第一下料平台1421位于第一下料中间位;
140.4.9、第一下料平台1421由第一下料中间位滑动至第一下料低位14211;
141.4.10、第一下料转交机械手1423将位于第一下料低位14211的第一下料平台1421上的显示屏200输送至位于第一下料承接位14241的第一下料中转平台1424上,并通过第一ccd下料视觉系统对第一下料中转平台1424上的显示屏200的位置进行检测;
142.4.11、如果位于第一下料中转位14242的第一下料中转平台1424上的显示屏200为demura成功的,则等待下料,如果位于第一下料中转位14242的第一下料中转平台1424上的显示屏200为demura失败的,则转移到第一ng缓存平台1425上;
143.4.12、demura后的显示屏200输送到位于第二下料低位14311的第二下料平台1431上;
144.4.13、第二下料转交机械手1433将位于第二下料低位14311的第二下料平台1431上的显示屏200输送至位于第二下料承接位14341的第二下料中转平台1434上;
145.4.14、位于第二下料承接位14341的第二下料中转平台1434承接显示屏200后,由第二下料承接位14341滑动至第二下料中转位14342,并通过第二ccd下料视觉系统对第二下料中转平台1434上的显示屏200的位置进行检测;
146.4.15、如果位于第二下料中转位14342的第二下料中转平台1434上的显示屏200为demura成功的,则等待下料,如果位于第二下料中转位14342的第二下料中转平台1434上的显示屏200为demura失败的,则转移到第二ng缓存平台1435上;
147.4.16、位于第二下料低位14311的第二下料平台1431上的显示屏200被取走后,第二下料平台1431由第二下料低位14311滑动至第二下料中间位;
148.4.17、位于第二下料平台1431下方的第二顶升下料分流平台1432上升,使第二下料平台1431由第二下料中间位升至第二下料高位14312;
149.4.18、demura后的显示屏200输送到位于第二下料高位14312的第二下料平台1431上;
150.4.19、位于第二下料高位14312的第二下料平台1431上承接显示屏200后,位于第
二下料平台1431下方的第二顶升下料分流平台1432下降,使第二下料平台1431位于第二下料中间位;
151.4.20、第二下料平台1431由第二下料中间位滑动至第二下料低位14311;
152.4.21、第二下料转交机械手1433将位于第二下料低位14311的第二下料平台1431上的显示屏200输送至位于第二下料承接位14341的第二下料中转平台1434上,在滑动过程中还通过第二ccd下料视觉系统对第二下料中转平台1434上的显示屏200的位置进行检测;
153.4.22、如果位于第二下料中转位14342的第二下料中转平台1434上的显示屏200为demura成功的,则等待下料,如果位于第二下料中转位14342的第二下料中转平台1434上的显示屏200为demura失败的,则转移到第二ng缓存平台1435上。
154.重复执行上述步骤。
155.五、用于对显示屏200进行下料的终端下料机构15(请参照图8)
156.终端下料机构15包括终端下料承载架151、空承载盘传输模块152、第一满承载盘传输模块153、第二满承载盘传输模块154、ng传输模块155、下料取料装置和空承载盘搬运结构。
157.空承载盘传输模块152、第一满承载盘传输模块153、第二满承载盘传输模块154和ng传输模块155沿下料承载架151的长度方向依次设置在下料承载架151上。
158.空承载盘传输模块152包括空承载盘传输流水线1521和空承载盘升降平台1522。空承载盘传输流水线1521在其输送方向上包括空承载盘上料位15211和空承载盘上升位15212。空承载盘升降平台1522沿竖直方向滑动设置在空承载盘上升位15212的上方,用于将位于空承载盘上升位15212的多个空的承载盘100逐个升高。
159.第一满承载盘传输模块153包括第一满承载盘传输流水线1531和第一满承载盘升降平台1532。第一满承载盘传输流水线1531在其输送方向上包括第一满承载盘下料位15311和第一满承载盘下降位15312,用于将位于第一满承载盘下降位15312的满的承载盘100输送至第一满承载盘下料位15311。第一满承载盘升降平台1532沿竖直方向滑动设置在第一满承载盘下降位15312的上方,用于逐个承接空承载盘升降平台1522升高的空的承载盘100,待空的承载盘100里放置显示屏200后,将满的承载盘100逐个下降至第一满承载盘下降位15312。
160.第二满承载盘传输模块154包括第二满承载盘传输流水线1541和第二满承载盘升降平台1542。第二满承载盘传输流水线1541在其输送方向上包括第二满承载盘下料位15411和第二满承载盘下降位15412,用于将位于第二满承载盘下降位15412的满的承载盘100输送至第二满承载盘下料位15411。第二满承载盘升降平台1542沿竖直方向滑动设置在第二满承载盘下降位15412的上方,用于逐个承接空承载盘升降平台1522升高的空的承载盘100,待空的承载盘100里放置显示屏200后,将满的承载盘100逐个下降至第二满承载盘下降位15412。
161.ng传输模块155包括ng传输流水线1551和ng升降平台1552。ng传输流水线1551与第二满承载盘传输流水线1541相邻且平行设置,ng传输流水线1551在其输送方向上包括ng下降位15512和ng下料位15511,ng下料位15511与第二满承载盘下料位15411相邻,ng下降位15512与第二满承载盘下降位15412相邻,ng传输流水线1551用于将位于ng下降位15512的满的承载盘100输送至ng下料位15511。ng升降平台1552竖直方向滑动设置在ng下降位
15512的上方,用于逐个承接空承载盘升降平台1522升高的空的承载盘100,待空的承载盘100里放置显示屏200后,将满的承载盘100逐个下降至ng下降位15512。
162.空承载盘搬运结构滑动设置在空承载盘升降平台1522、第一满承载盘升降平台1532、第二满承载盘升降平台1542和ng升降平台1552的上方,用于将空承载盘升降平台1522升高的空的承载盘100分别逐个搬运至第一满承载盘升降平台1532、第二满承载盘升降平台1542和ng升降平台1552上。
163.下料取料装置包括下料取料龙门架和下料取料机械手。
164.终端下料机构15对显示屏200进行下料的流程如下:
165.5.1、将多个空的承载盘100放置于空承载盘传输流水线1521的空承载盘上料位15211,并通过扫码器对多个空的承载盘100进行整体扫码,扫码结束后,空承载盘传输流水线1521将多个空的承载盘100输送至空承载盘上升位15212;
166.5.2、空承载盘升降平台1522将位于空承载盘上升位15212的多个空的承载盘100升高至上方的矫正装置,矫正装置对承载盘100进行逐个矫正;
167.5.3、空承载盘搬运结构将空承载盘上升位15212矫正后的空的承载盘100搬运至位于第一满承载盘下降位15312上方的第一满承载盘升降平台1532上;
168.5.4、位于第一满承载盘升降平台1532上方的矫正装置对空的承载盘100进行再次矫正;
169.5.5、位于第一满承载盘升降平台1532上方的扫码器对空的承载盘100进行单个扫码;
170.5.6、开启第一ccd下料视觉系统和第一下料红外灯光,根据第一ccd下料视觉系统的检测参数,下料取料机械手旋转至合适的角度,使下料取料固定片上的下料取料吸头和下料取料固定片上的下料取料吸头对应显示屏200和fpc300合适的位置,并将位于第一下料中转位14242的第一下料中转平台1424上的显示屏200取走,下料取料机械手旋转至初始位置后再顺时针旋转90度后,将两块显示屏200放置于第一满承载盘升降平台1532上的空的承载盘100里;
171.5.7、下料取料机械手逆时针旋转90度后回到初始位置,再次根据第一ccd下料视觉系统的检测参数,下料取料机械手旋转至合适的角度,使下料取料固定片上的下料取料吸头和下料取料固定片上的下料取料吸头对应显示屏200和fpc300合适的位置,并将位于第一下料中转位14242的第一下料中转平台1424上的显示屏200取走,下料取料机械手旋转至初始位置后再逆时针旋转90度后,将两块显示屏200放置于第一满承载盘升降平台1532上的空的承载盘100里,使得该步骤运送的两块显示屏200与步骤5.6运送的两块显示屏200两两相对设置。
172.5.8、满的承载盘100通过第一满承载盘升降平台1532下降至第一空承载盘下降位11312;
173.5.9、当位于第一满承载盘下降位15312的满的承载盘100达到一定的数量后,第一满承载盘传输流水线1531将位于第一满承载盘下降位15312的满的承载盘100输送至第一满承载盘100下料位;
174.5.10、空承载盘搬运结构将空承载盘上升位15212矫正后的空的承载盘100搬运至位于第二满承载盘下降位15412上方的第二满承载盘升降平台1542上;
175.5.11、位于第二满承载盘升降平台1542上方的矫正装置对空的承载盘100进行再次矫正;
176.5.12、位于第二满承载盘升降平台1542上方的扫码器对空的承载盘100进行单个扫码;
177.5.13、开启第二ccd下料视觉系统和第二下料红外灯光,根据第二ccd下料视觉系统的检测参数,下料取料机械手旋转至合适的角度,使下料取料固定片上的下料取料吸头和下料取料固定片上的下料取料吸头对应显示屏200和fpc300合适的位置,并将位于第二下料中转位14342的第二下料中转平台1434上的显示屏200取走,下料取料机械手旋转至初始位置后再顺时针旋转90度后,将两块显示屏200放置于第二满承载盘升降平台1542上的空的承载盘100里;
178.5.14、下料取料机械手逆时针旋转90度后回到初始位置,再次根据第二ccd下料视觉系统的检测参数,下料取料机械手旋转至合适的角度,使下料取料固定片上的下料取料吸头和下料取料固定片上的下料取料吸头对应显示屏200和fpc300合适的位置,并将位于第二下料中转位14342的第二下料中转平台1434上的显示屏200取走,下料取料机械手旋转至初始位置后再逆时针旋转90度后,将两块显示屏200放置于第二满承载盘升降平台1542上的空的承载盘100里,使得该步骤运送的两块显示屏200与步骤5.13运送的两块显示屏200两两相对设置。
179.5.15、满的承载盘100通过第二满承载盘升降平台1542下降至第二空承载盘下降位11412;
180.5.16、当位于第二满承载盘下降位15412的满的承载盘100达到一定的数量后,第二满承载盘传输流水线1541将位于第二满承载盘下降位15412的满的承载盘100输送至第二满承载盘100下料位;
181.5.17、空承载盘搬运结构将空承载盘上升位15212矫正后的空的承载盘100搬运至位于ng下降位15512上方的ng升降平台1552上;
182.5.18、位于ng升降平台1552上方的矫正装置对空的承载盘100进行再次矫正;
183.5.19、位于ng升降平台1552上方的扫码器对空的承载盘100进行单个扫码;
184.5.20、下料取料机械手将位于第一下料中转位14242的第一下料中转平台1424上的demura失败的显示屏200取走,放置于第一ng缓存平台1425上,待积攒到两块后下料取料机械手将位于第一ng缓存平台1425上的两块显示屏200取走放置于ng升降平台1552上的承载盘100里;
185.5.21、下料取料机械手将位于第二下料中转位14342的第二下料中转平台1434上的demura失败的显示屏200取走,放置于第二ng缓存平台1435上,待积攒到两块后下料取料机械手将位于第二ng缓存平台1435上的两块显示屏200取走放置于ng升降平台1552上的承载盘100里;
186.5.22、满的承载盘100通过ng升降平台1552下降至ng下降位15512;
187.5.23、当位于ng下降位15512的满的承载盘100达到一定的数量后,ng传输流水线1551将位于至ng下降位15512的满的承载盘100输送至ng下料位15511。
188.重复执行上述步骤。
189.本发明提供的高效自动demura设备,其通过上料中转机构可以对四条demura工段
进行上料,提高了工作效率,同时其结构紧凑,占用生产场地较小。
190.综上所述,虽然本发明已以优选实施例揭露如上,但上述优选实施例并非用以限制本发明,本领域的普通技术人员,在不脱离本发明的精神和范围内,均可作各种更动与润饰,因此本发明的保护范围以权利要求界定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1