一种自动化生物样本库的制作方法
1.本发明涉及低温存储技术领域,具体为一种自动化生物样本库。
背景技术:
2.生物样本、疫苗等的存储需要超低温的环境来保证生物样本的稳定及存储时间,同时,由于生物样本、疫苗种类、数量繁多,仓储柜通常选用多单元、多层分类存储,在超低温环境下,生物样本的存储需要采用自动化拿取设备。
3.为保证自动化拿取设备的正常运行,降低超低温存储区域的能耗,需要对生物样本仓储柜进行良好的密封,防止超低温存储区域冷气外漏。现有技术中,密封效果较好的是仓储柜顶部开门采用顶部密封的结构,此结构密封效果好,但是进行生物样本拿取操作时需要较大的空间。采用侧置滑动开门的仓储柜密封效果较差,低温冷藏区域的冷气外漏会导致外部设备运行故障并增加能耗。
4.同时,在实际应用中,选取机构、搬运机构结构复杂,控制过程繁琐,动作执行效率差,尤其是选取机构体积较大、重量大,选取、搬运过程稳定性差,不能满足多生物样本快速抓取、快速转移的要求。
5.此外,生物样本库需存储不同的生物样本或疫苗等,需要一个中转区通过中转装置配合人工输入的信息对不同的生物样本、疫苗进行信息录入或拿取。
6.基于此,研发具有高水平自动化程度高的自动化生物样本库,实现对多单元、多层存储柜样本的密封存储、快速选取、快速搬运,具有重要的意义。
技术实现要素:
7.本发明的目的在于提供一种自动化生物样本库,以解决上述背景技术中提出的问题。
8.一种自动化生物样本库,其包括:
9.设置有若干存储层的储存机构;
10.保存于储存机构中的、包括试管盒、托盘的托盘机构;
11.用于运输托盘机构的搬运机构;
12.用于暂存试管盒的自动处理台;
13.搭载于搬运机构上的、用于将托盘从储存柜中拉出,并将托盘中的试管盒推向自动处理台的选取机构;
14.用于对自动处理台上的试管盒进行搬运的中转装置。
15.进一步,
16.所述储存机构包括储存柜及安装于储存柜上的柜门机构;
17.安装于柜门机构上的密封门;
18.用于保持密封门与柜门机构锁紧关系的锁紧机构;
19.所述托盘底部设置有拉手;
20.所述柜门机构包括若干柜门框架,相邻柜门框架组成一个存储单元,每个存储单元内从上至下设置有若干存储层,每个存储层安装有密封门;柜门框架上安装有滑轨,密封门的两端设置有与滑轨配合的滑块,用于实现密封门的上下移动;
21.每个存储单元顶部设置有机动层,所述机动层设置有将相邻柜门框架连接的密封板;机动层没有设置密封门,当某一层的密封门上移,带动该层以上的所有密封门上移,机动层的位置被占用,实现该层柜门机构的开启;
22.密封门后端与柜门框架的接触部位设置有密封条;柜门框架上开设有与密封条匹配的迷宫槽;密封门后端与柜门框架的接触部位为长方体结构,所述长方体结构的底面和侧面分别设置有截面为“l”形的密封条,柜门框架上开设有与“l”形的密封条匹配的迷宫槽;密封门包括门板,门板前端设置有用于供其它机构带动密封门升降的开门机构;上下相邻密封门之间设置有用于降低密封门之间的碰撞磨损的护板;
23.所述锁紧机构包括:
24.设置于密封门外侧的、对密封门起压紧作用的锁紧压板;设置于锁紧压板两端的偏心机构;所述偏心机构的一端通过转轴连接于轴承座内,另一端连接电动推杆,在电动推杆的推动下,锁紧压板可绕转轴旋转,实现对密封门的压紧;所述电动推杆、轴承座通过连接座连接于安装座上。
25.进一步,
26.所述搬运机构包括:
27.地面轨道,所述地面轨道上安装有地面轨道滑轨;
28.主架,所述主架通过地面轨道滑块连接于地面轨道滑轨上,可沿地面轨道滑轨滑动;
29.主架上设置有主架轨道;
30.升降座,所述升降座上设置有升降座滑块;
31.升降座通过升降座滑块连接于主架轨道,可沿主架轨道上下滑动;
32.主架上安装有配重机构,所述配重机构包括安装于主架上的配重导轨、设置于配重导轨上的可沿配重导轨上下滑动的配重块;
33.主架上安装有主架滑轮、钢丝绳,所述钢丝绳绕过主架滑轮,两端分别连接配重块和升降座;
34.地面轨道上还设置有地面轨道齿条;主架上安装有主架驱动机构,所述主架驱动机构包括主架电机、主架电机的输出轴连接主架齿轮,所述主架齿轮与地面轨道齿条啮合连接,主架电机驱动主架沿地面轨道滑轨滑动;
35.主架上设置有升降座驱动机构、升降座传动机构;所述升降座传动机构包括升降座同步带、上、下两个升降座转轴,升降座转轴两端连接有升降座齿轮,升降座同步带连接上、下两个升降座齿轮;升降座上安装有升降座连接件,升降座通过升降座连接件与升降座同步带固定连接;升降座驱动机构包括升降座电机、升降座驱动同步带;升降座转轴上还设置有升降座驱动齿轮;升降座电机的输出轴通过升降座驱动同步带与升降座驱动齿轮连接,将升降座电机的输出动力传递至升降座转轴,带动升降座沿主架轨道升降;
36.配重导轨上安装有配重底板,所述配重底板上搭载若干配重块,配重块开设有“u”形孔,配重导轨设置于“u”形孔内;所述配重块开设有通孔,通孔内设置有配重块插条,配重
块插条底部穿过配重底板并设置有插条限位,对配重块起限位作用;配重块插条端部安装有插条挂耳,升降座端部设置有升降座挂耳,钢丝绳两端分别连接插条挂耳和升降座挂耳。
37.进一步,
38.选取机构包括:
39.用于抬升密封门的开门机构;
40.用于将托盘从储存柜中拉出的拉盘机构;
41.用于将拉出托盘中的试管盒推向自动操作台的推盒机构;
42.所述开门机构包括:
43.抬升支座及安装于抬升支座上的抬臂滑轨、抬臂电机、滚珠丝杠;所述抬臂电机输出端连接有抬臂第一带轮,滚珠丝杠的端部连接有抬臂第二带轮,抬臂第一带轮与抬臂第二带轮通过同步带连接;滚珠丝杠上连接有抬臂滑块,通过抬臂电机带动滚珠丝杠转动实现抬臂滑块升降;
44.抬臂滑轨上安装有抬臂连接座,抬臂连接座同时与抬臂滑块固定连接;抬臂连接座上安装有摆臂,摆臂前端设置有用于挑动密封门抬升开门的挑杆;
45.所述抬臂连接座上还设置有摆臂轴承座,摆臂中部通过摆臂转轴连接至摆臂轴承座,使摆臂可绕摆臂转轴转动;
46.摆臂选用金属材料,抬臂连接座上对应摆臂后端的位置上设置有电磁铁,通过电磁铁控制摆臂转动;
47.所述开门机构、拉盘机构、推盒机构安装于架梁机构上,所述架梁机构包括:
48.设置有低层横梁、低层纵梁的低层架梁;
49.安装于低层架梁上的一对门式架梁;
50.安装于一对门式架梁之间的中层架梁,所述中层架梁包括中层低梁、中层高梁;
51.安装于中层架梁上的高层架梁,所述高层架梁包括安装于中层低梁上的高层第一架梁、安装于中层高梁上的高层第二架梁;
52.所述拉盘机构包括:
53.两端分别固定于一对门式架梁上的安装板;
54.设置于安装板上方的送盘滑轨;
55.安装于送盘滑轨上的可沿送盘滑轨滑动的送盘滑块;
56.固定连接于送盘滑块上的托盘搭载架;
57.与托盘搭载架连接的送盘驱动装置;
58.所述送盘驱动装置包括:
59.与托盘搭载架固定连接的送盘齿条;
60.设置于安装板侧方的送盘连接板;
61.安装于送盘连接板上的送盘电机;
62.与送盘电机连接的、与送盘齿条啮合的送盘齿轮;
63.设置于安装板下方的线性滑轨;
64.线性滑轨内设置的可滑动的滑条;
65.连接于滑条上的拉钩组件;
66.与拉钩组件连接的拉盘动力机构;
67.所述拉钩组件包括拉钩盘,所述拉钩盘上安装有拉钩,所述拉钩通过齿轮连接拉钩电机;所述齿轮包括拉钩第一齿轮、拉钩第二齿轮、拉钩第三齿轮,所述拉钩第一齿轮连接于拉钩电机,拉钩第三齿轮通过连接轴连接拉钩,第一齿轮、拉钩第三齿轮之间通过拉钩第二齿轮连接,通过拉钩电机可带动拉钩旋转;
68.所述拉盘动力机构包括拉盘电机及固定于低层横梁上的两个拉盘带轮,拉盘电机通过传动轴连接至拉盘带轮,两个拉盘带轮之间安装有拉盘同步带,拉钩盘底部固定连接于拉盘同步带上,通过拉盘电机带动同步带转动,带动拉钩盘沿线性滑轨滑动;
69.所述推盒机构包括安装于高层第一架梁、高层第二架梁上的推盒搭载板,所述推盒搭载板上设置有推盒滑轨,推盒滑轨上安装有可沿推盒滑轨滑动的推盒托梁;推盒搭载板上还安装有推盒托梁的驱动机构,所述驱动机构包括推盒第二电机、一对由推盒同步带连接的推盒带轮,推盒第二电机通过输出轴连接推盒带轮;推盒托梁通过托梁连接板固定连接至推盒同步带,由推盒第二电机带动推盒同步带、推盒托梁移动;
70.所述推盒托梁上安装有垂直设置有推盒滑轨,推盒滑轨上滑动连接有推盒齿条,推盒齿条上安装有推板;推盒托梁上还安装有推板的升降驱动机构,所述驱动机构包括推盒第一电机以及与推盒第一电机连接的推盒齿轮,所述推盒齿轮与推盒齿条啮合,由推盒第一电机带动推盒齿条、推板升降。
71.进一步,
72.所述中转装置包括:
73.中转支撑架及安装于中转支撑架上的x轴轨道;
74.安装于x轴轨道上的、可沿x轴轨道滑动的y轴轨道;
75.安装于y轴轨道上的、可沿y轴轨道滑动的z轴轨道;
76.安装于z轴轨道上的、可沿z轴轨道滑动的z轴搭载板;
77.设置于y轴轨道行程上的自动处理台;
78.所述x轴轨道上安装有x轴齿条,y轴轨道上对应安装有x轴电机,x轴电机的输出轴连接有与x轴齿条啮合的x轴齿轮,由x轴电机带动y轴轨道沿x轴轨道滑动;
79.所述y轴轨道上安装有可沿y轴轨道滑动的z轴轨道,z轴轨道上设置有y轴电机,y轴电机的输出轴连接y轴齿轮;y轴轨道上设置有与y轴齿轮啮合的y轴齿条;y轴电机带动z轴轨道沿y轴轨道滑动;
80.所述z轴轨道上安装有z轴电机,z轴电机的输出轴连接z轴齿轮;z轴搭载板上安装有与z轴齿轮啮合的z轴齿条;由z轴电机带动z轴搭载板、沿z轴轨道滑动。
81.进一步,
82.z轴搭载板上安装有机械手;
83.所述机械手包括用于夹取试管盒的机械手手臂以及用于驱动机械手手臂完成夹取动作的机械手驱动电机、机械手传动机构;
84.所述机械手手臂包括第一机械手手臂、第二机械手手臂;
85.所述机械手传动机构包括第一机械手齿条、第二机械手齿条以及设置于第一机械手齿条、第二机械手齿条中间的与第一机械手齿条、第二机械手齿条啮合的驱动齿轮轴;
86.第一机械手手臂、第二机械手手臂分别与第一机械手齿条、第二机械手齿条固定连接;
87.驱动齿轮轴与机械手驱动电机连接,由驱动电机带动旋转,驱动第一机械手齿条、第二机械手齿条向相反方向滑动;
88.所述第一机械手手臂通过第一限位块连接第一机械手齿条,第二机械手手臂通过第二限位块连接第二机械手齿条,第一限位块、第二限位块对第一机械手手臂、第二机械手手臂起至限位作用,避免接触碰撞;
89.第一机械手齿条、第二机械手齿条外侧设置有封装壳,所述封装壳内部设置有机械手滑轨,所述机械手滑轨包括第一机械手滑轨、第二机械手滑轨,第一机械手齿条、第二机械手齿条分别通过滑条连接于第一机械手滑轨、第二机械手滑轨内;
90.进一步,所述自动处理台上设置有台面,台面上设置有用于暂存生物样本试剂盒的暂存区、用于与选取机构对接的对接区、设置有扫描仪,用于对不同的生物样本试管进行扫描记录信息的扫描区;自动处理台对面还设置有人工处理台,用于搭载生物样本进行人工处理操作。
91.与现有技术相比,本发明的有益效果是:
92.第一、本发明的储存机构中,柜门采用上下滑动开闭方式,在柜门单元顶部预留机动空间,可以选择将任意层的柜门向上推动,实现开门,关门过程通过重力作用可自动实现,减小了柜门开闭动作复杂程度以及柜门开闭所需空间;密封门上设置有密封条,柜门框架上开设有匹配的迷宫槽,提高了柜门的密封性,降低了冷库能耗;设计了采用电动推杆作为动力的锁紧机构,通过偏心机构将电动推杆转化为锁紧压板对密封门的压力,具有控制简单、锁紧效果好、成本低的优点。
93.第二、本发明的搬运机构中,通过机械结构设计增强了搬运过程的稳定性,设计了搭载有配重机构、升降座的主架,主架上设置有搭载钢丝绳的滑轮,钢丝绳将配重机构、升降座连接,增强了升降座升降过程的稳定;搬运机构底部设置了地面轨道与安装了相应的驱动机构,主架可沿地面轨道迅速移动,这样可以在搬运机构的单侧或两侧可设置仓储货架,并且升降座上可根据不同货物存取方式继续安装不同的货物抓取机构,可满足搭载大体积、大重量的抓取机构的要求。
94.第三、本发明的选取机构中,针对上下滑动开闭方式的低温存储仓柜,设计了自动化程度非常高的开门机构、拉盘机构、推盒机构,通过开门机构抬升打开密封门,由拉盘机构将托盘拉出,拉盘机构中设置的送盘机构将托盘输送至指定位置,由推盒机构将托盘中的试管盒推出,整个过程无需人工参与,自动化水平高,开门机构、拉盘机构、推盒机构机械结构设计合理,各动作衔接效率高。
95.第四、本发明的中转装置中,设计了用于搭载机械手移动x轴轨道、y轴轨道、z轴轨道,使机械手根据设计需要对处理台上的生物样本进行拿取移动操作,并通过自动处理台、人工处理台,可快速高效地录入不同生物样本的信息、挑选不同的生物样本试剂,提高了生物样本库的工作效率、使用范围;
96.第五、本发明设计的搭载于中转装置中的机械手,通过机械结构设计使控制过程简化,设计了第一机械手齿条、第二机械手齿条以及与其啮合的驱动齿轮轴传动机构,驱动齿轮轴转动过程中,带动第一机械手齿条、第二机械手齿条向相反的方向运动,只需控制驱动齿轮轴连接的驱动电机的正转、反转即可完成第一机械手手臂、第二机械手手臂的抓取与释放动作;机械手设计了第一限位块、第二限位块,分别安装于第一机械手手臂、第二机
械手手臂上,起到限位作用,避免接触碰撞;设计了封装壳,在封装壳内部设置了第一机械手齿条、第二机械手齿条的滑轨,保证了第一机械手齿条、第二机械手齿条的滑动动作顺畅,效率大大提升。
97.第六、本发明提供的自动化生物样本库,可满足低温环境下生物样本的密封储存、选取、搬运、暂存、中转的要求,整个过程自动化水平高,能够适用于大批量生物样本的存储与搬运。
附图说明
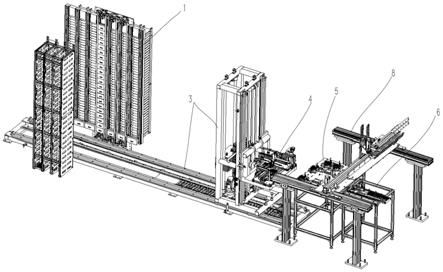
98.图1为自动化生物样本库的结构示意图;
99.图2为储存柜、柜门机构、锁紧机构结构示意图;
100.图3为图2的俯视图;
101.图4为柜门机构与密封门结构示意图;
102.图5为柜门机构与锁紧机构结构示意图;
103.图6为锁紧机构结构示意图;
104.图7为电动推杆与锁紧压板结构示意图;
105.图8为锁紧压板结构示意图;
106.图9为密封门正面结构示意图;
107.图10为密封门背面结构示意图;
108.图11为实施例1中低温自化仓库结构示意图;
109.图12为储存机构及选取机构结构示意图;
110.图13为储存柜及托盘机构结构示意图;
111.图14为选取机构第一视角结构示意图;
112.图15为选取机构第二视角结构示意图;
113.图16选取机构第三视角结构示意图;
114.图17为开门机构结构示意图;
115.图18为拉盘机构第一视角结构示意图;
116.图19为拉盘机构第二视角结构示意图;
117.图20为拉钩盘结构示意图;
118.图21为拉盘机构第三视角结构示意图;
119.图22为为拉盘机构第四视角结构示意图;
120.图23为推盒机构结构示意图;
121.图24为本搬运机构的整体结构示意图;
122.图25为主架结构示意图;
123.图26为升降座结构示意图;
124.图27为地面轨道结构示意图;
125.图28为配重块结构示意图;
126.图29为配重机构结构示意图;
127.图30为生物样本库样本中转装置结构示意图;
128.图31为x轴轨道、y轴轨道、z轴轨道结构示意图;
129.图32为图31的局部结构放大示意图;
130.图33为x轴轨道、y轴轨道、z轴轨道及局部结构示意图;
131.图34为机械手的整体结构示意图;
132.图35为机械手的内部结构示意图一;
133.图36为机械手的内部结构示意图二;
134.图37为试管盒及机械手手臂结构示意图;
135.图38为自动处理台及人工处理台结构示意图。
136.图中:
137.储存机构1、
138.储存柜11、柜门机构12、锁紧机构13、密封门14、低温仓库15、柜门框架121、滑轨1211、迷宫槽1212、密封板122、锁紧压板131、轴承座132、连接座133、电动推杆134、转轴135、偏心机构136、安装座137、门板141、密封条142、开门机构143、护板144、滑块145、
139.托盘机构2、
140.试管盒21、拉手22、托盘23、试管盒搭载底板24、
141.搬运机构3、
142.地面轨道31、地面轨道滑轨311、地面轨道齿条312、地面轨道滑块313、主架32、主架轨道321、主架滑轮322、升降座33、升降座滑块331、升降座连接件332、升降座挂耳333、升降座驱动机构34、升降座电机341、升降座驱动同步带342、升降座驱动齿轮343、配重机构35、配重导轨351、配重块352、钢丝绳353、配重块插条354、插条挂耳355、配重底板356、插条限位357、升降座传动机构36、升降座同步带361、升降座转轴362、升降座齿轮363、主架驱动机构37、主架电机371、主架齿轮372、
143.选取机构4、
144.开门机构43、
145.抬升支座431、抬臂滑轨4311、抬臂电机432、滚珠丝杠433、抬臂滑块434、摆臂435、摆臂转轴4351、摆臂轴承座4352、挑杆4353、抬臂连接座436、抬臂第一带轮437、抬臂第二带轮438、
146.拉盘机构44、拉钩组件441、拉钩盘4411、拉钩4412、拉钩电机4413、拉钩第一齿轮4414、拉钩第二齿轮4415、拉钩第三齿轮4416、
147.安装板442、拉盘动力机构443、拉盘电机4431、拉盘带轮4432、拉盘同步带4433、托盘搭载架444、线性滑轨445、连接桥446、送盘驱动装置447、送盘电机4471、送盘齿轮4472、送盘齿条4473、送盘连接板4474、送盘滑轨448、送盘滑块4481、
148.推盒机构45、推盒搭载板451、推盒滑轨452、推盒托梁453、推盒滑轨4531、推盒齿条4532、推板4533、托梁连接板4534、推盒动力机构454、推盒第一电机4541、推盒齿轮4542、推盒第二电机455、推盒同步带456、推盒带轮457、
149.低层架梁46、低层横梁461、低层纵梁462、门式架梁47、中层架梁48、
150.中层低梁481、中层高梁482、高层架梁49、高层第一架梁491、高层第二架梁492、自动处理台5、台面51、扫描区52、扫描仪53、对接区54、暂存区55、人工处理台6、
151.机械手7、
152.机械手驱动电机71、封装壳72、机械手滑轨73、第一机械手滑轨731、第二机械手滑
轨732、机械手手臂74、第一机械手手臂741、第二机械手手臂742、限位块75、第一限位块751、第二限位块752、机械手传动机构76、第一机械手齿条761、第二机械手齿条762、驱动齿轮轴763。
153.中转装置8、
154.x轴轨道81、x轴齿条811、x轴电机812、x轴齿轮813、
155.y轴轨道82、y轴齿条822、y轴电机823、y轴齿轮824、
156.z轴轨道83、z轴搭载板831、z轴电机832、z轴齿轮833、z轴齿条834、中转支撑架84。
具体实施方式
157.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
158.请参阅图1-38,本发明提供一种自动化生物样本库,其包括设置有若干存储层的储存机构1;保存于储存机构1中的、包括试管盒21、托盘23的托盘机构2;用于运输托盘机构2的搬运机构3;用于暂存试管盒21的自动处理台5;搭载于搬运机构3上的、用于将托盘23从储存柜1中拉出,并将托盘23中的试管盒21推向自动处理台5的选取机构4;用于对自动处理台5上的试管盒21进行搬运的中转装置8。
159.实施例1,
160.本实施例中,储存机构1包括储存柜11及安装于储存柜11上的柜门机构12;柜门机构12上安装有密封门14;密封门14外侧安装有用于保持密封门14与柜门机构12锁紧关系的锁紧机构13。
161.所述柜门机构12包括若干柜门框架121,相邻柜门框架121组成一个存储单元,每个存储单元内从上至下设置有若干存储层,每个存储层安装有密封门14;柜门框架121上安装有滑轨1211,密封门14的两端设置有与滑轨1211配合的滑块145,在滑块与滑轨的作用下,密封门14可以实现上下移动。
162.每个存储单元顶部设置有机动层,所述机动层设置有将相邻柜门框架121连接的密封板122;机动层没有设置密封门14,当某一层的密封门14上移,带动该层以上的所有密封门14上移,下层的密封门14将机动层的位置占用,实现该层柜门机构的开启。
163.密封门14后端与柜门框架121的接触部位设置有密封条142;柜门框架121上开设有与密封条142匹配的迷宫槽1212。
164.密封门14后端与柜门框架121的接触部位为长方体结构,所述长方体结构的底面和侧面分别设置有截面为“l”形的密封条142,两条密封条的窄边靠近设置,柜门框架121上开设有与“l”形的密封条142匹配的迷宫槽1212。
165.密封门4包括门板141,门板141前端设置有用于供其它机构带动密封门4升降的开门机构143。可以设置机械手带动密封门14升降,开门动作过程中,可能会使密封门14之间发生磨损,在相邻密封门14之间设置护板144,降低密封门14的磨损。
166.锁紧机构13包括锁紧压板131、轴承座132、连接座133、电动推杆134、转轴135、偏心机构136、安装座137,其中密封门14外侧的设置有对密封门14起压紧作用的锁紧压板
131;锁紧压板131两端安装有偏心机构136;所述偏心机构136的一端通过转轴135连接于轴承座132内,另一端连接电动推杆134,在电动推杆134的推动下,锁紧压板131可绕转轴135旋转,实现对密封门14的压紧。所述电动推杆134、轴承座32通过连接座133连接于安装座137上。
167.偏心机构136的结构为长方体形状,电动推杆134连接于长方体的其中一个角,在该角的对角位置设置有转轴135和锁紧压板131,电动推杆134的横向伸缩带动转轴135在轴承座132内旋转,进一步带动锁紧压板131小角度旋转,实现对密封门4的压紧。
168.储存机构1还可以是一种低温自动化仓库15,其包含柜门密封机构,储存柜11设置于低温自动化仓库15内部,柜门机构12通过连接组件与低温自动化仓库15连接固定;锁紧机构13设置上、下安装座137,通过安装座137连接于低温自动化仓库15上。
169.实施例2,
170.托盘机构2包括试管盒21、托盘23;所述托盘23底部设置有拉手22;所述托盘23设置于储存柜1的若干存储层中,托盘23中放置有若干试管盒21。
171.实施例3,
172.本实施例中,一种自动化生物样本库还包括选取机构4,所述选取机构4包括:
173.用于抬升密封门的开门机构43、用于将托盘23从储存柜11中拉出的拉盘机构44、用于将拉出托盘23中的试管盒21推向自动处理台5的推盒机构45。
174.所述开门机构43包括抬升支座431,抬升支座431上安装有抬臂滑轨4311、抬臂电机432、滚珠丝杠433。所述抬臂电机432输出端连接有抬臂第一带轮437,滚珠丝杠433的端部连接有抬臂第二带轮438,抬臂第一带轮437与抬臂第二带轮438通过同步带连接。滚珠丝杠433上连接有抬臂滑块434,通过抬臂电机432带动滚珠丝杠433转动实现抬臂滑块434升降。
175.抬臂滑轨4311上安装有抬臂连接座436,抬臂连接座436同时与抬臂滑块434固定连接;抬臂连接座436上安装有摆臂435,摆臂435前端设置有用于挑动密封门抬升开门的挑杆4353。
176.实施例4,
177.本实施例中,设计专门结构用于实现摆臂小范围旋转摆动。述抬臂连接座436上还设置有摆臂轴承座4352,摆臂435中部通过摆臂转轴4351连接至摆臂轴承座4352,使摆臂435可绕摆臂转轴4351转动。
178.摆臂435选用金属材料,抬臂连接座436上对应摆臂435后端的位置上设置有电磁铁439,电磁铁439通电后产生磁性,吸引摆臂435绕摆臂转轴4351转动;摆臂435前端的位置上设置有弹簧机构,断开电磁铁439后,摆臂435在弹簧机构的作用下复位。
179.实施例5,
180.本实施例中,本发明设计了搭载开门机构43、拉盘机构44、推盒机构45的架梁,开门机构43、拉盘机构44、推盒机构45安装于架梁机构上,所述架梁机构包括低层架梁46,所述低层架梁46包括低层横梁461、低层纵梁462;开门机构43底部连接于低层横梁461上。
181.低层架梁46上前、后安装有一对起支撑作用的门式架梁47,一对门式架梁47之间安装有中层架梁48,所述中层架梁48包括中层低梁481、中层高梁482。
182.中层架梁48上方安装高层架梁49,所述高层架梁49包括安装于中层低梁481上的
高层第一架梁491和安装于中层高梁482上的高层第二架梁492。
183.实施例6,
184.本实例涉及拉盘机构44,拉盘机构44包括两端分别固定于一对门式架梁47上的安装板442。安装板442设置有左、右两个。安装板442上方设置有送盘滑轨448。送盘滑轨448上安装有可沿送盘滑轨448滑动的送盘滑块4481;送盘滑块4481上固定连接有托盘搭载架444;送盘滑轨448、托盘搭载架444均设置有两个,间隔宽度根据托盘423的宽度设定。
185.托盘搭载架444可带动托盘423滑动。其动力来自于送盘驱动装置447;所述送盘驱动装置447包括与托盘搭载架444固定连接的送盘齿条4473;安装板442侧方设置有送盘连接板4474;送盘连接板4474上安装送盘电机4471;送盘电机4471连接有与送盘齿条4473啮合的送盘齿轮4472;送盘电机4471通过送盘齿轮4472传动至送盘齿条4473,送盘齿条4473带动托盘搭载架444滑动,托盘搭载架444上搭载有托盘423,通过上述方式可以调整托盘423的位置。
186.上述动作是在托盘423被拉出之后进行的,托盘423从储存柜41中被拉出依靠下述的拉盘机构44涉及的结构。
187.安装板442下方设置有线性滑轨445,线性滑轨445内设置有可滑动的滑条,滑条上底部连接至拉钩组件441。与拉钩组件441依靠拉盘动力机构443提供动力进行拉钩动作。
188.拉盘动力机构443包括拉盘电机4431及固定于低层横梁461上的两个拉盘带轮4432,拉盘电机4431通过传动轴连接至拉盘带轮4432,两个拉盘带轮4432之间安装有拉盘同步带4433,拉钩盘4411底部固定连接于拉盘同步带4433上,通过拉盘电机4431带动同步带4433转动,带动拉钩盘4411沿线性滑轨445滑动。
189.所述拉钩组件441包括拉钩盘4411,所述拉钩盘4411上安装有拉钩4412,所述拉钩4412通过齿轮连接拉钩电机4413。
190.一个优选的方案中,齿轮包括拉钩第一齿轮4414、拉钩第二齿轮4415、拉钩第三齿轮4416,所述拉钩第一齿轮4414连接于拉钩电机4413,拉钩第三齿轮4416通过连接轴连接拉钩4412,第一齿轮4414、拉钩第三齿轮4416之间通过拉钩第二齿轮4415连接,通过拉钩电机4413可带动拉钩4412旋转。
191.实施例7,
192.本实施例涉及推盒机构45,所述推盒机构45包括安装于高层第一架梁491、高层第二架梁492上的推盒搭载板451,所述推盒搭载板451上设置有推盒滑轨452,推盒滑轨452上安装有可沿推盒滑轨452滑动的推盒托梁453;推盒搭载板451上还安装有推盒托梁453的驱动机构,所述驱动机构包括推盒第二电机455、一对由推盒同步带456连接的推盒带轮457,推盒第二电机455通过输出轴连接推盒带轮457;推盒托梁453通过托梁连接板4534固定连接至推盒同步带456,由推盒第二电机455带动推盒同步带456、推盒托梁453移动。
193.推盒托梁453上安装有垂直设置有推盒滑轨4531,推盒滑轨4531上滑动连接有推盒齿条4532,推盒齿条4532上安装有推板4533;推盒托梁453上还安装有推板4533的升降驱动机构,所述驱动机构包括推盒第一电机4541以及与推盒第一电机4541连接的推盒齿轮4542,所述推盒齿轮4542与推盒齿条4532啮合,由推盒第一电机4541带动推盒齿条4532、推板4533升降。
194.本发明的开门过程如下,抬臂电机432带动滚珠丝杠433转动实现抬臂滑块434升
降、摆臂435升降至指定密封门高度,电磁铁439通电,带动摆臂435绕摆臂转轴4351转动,挑杆4353伸出至密封门,将密封向上提升一个行程高度,密封门打开。
195.拉盘、送盘过程如下,密封门打开后,拉盘电机4431带动拉钩盘4411沿线性滑轨445滑动,将拉钩盘4411的拉钩4412滑动至打开密封门的存储层内,拉钩盘4411的拉钩4412钩住托盘423底部的拉手422,将托盘423拉出至托盘搭载架444上。通过拉钩电机4413带动拉钩4412旋转,使拉钩4412与拉手422分离。
196.通过送盘电机4471带动托盘搭载架444及托盘423滑动,调整托盘423至指定位置,准备进入推盒过程。准备启动推盒机构将托盘423上搭载的试管盒421推送至指定位置。
197.推盒过程如下,启动推盒第一电机4541带动推盒齿条4532、推板4533升降至试管盒421高度。由推盒第二电机455带动推盒同步带456、推盒托梁453移动,推盒托梁453上的推板4533推动试管盒421移动。中层低梁481上相应位置设置有试管盒搭载底板424,推板4533推动试管盒421在试管盒搭载底板424上移动,推送至自动处理台5上的指定位置。
198.实施例8,
199.选取机构4搭载于搬运机构3的升降座上,搬运机构3包括:
200.地面轨道31,所述地面轨道31上安装有地面轨道滑轨311;地面轨道滑轨311上安装有主架32,所述主架32通过地面轨道滑块313连接于地面轨道滑轨311上,可沿地面轨道滑轨311滑动;地面轨道31上还设置有地面轨道齿条312;主架32上安装有主架驱动机构37,所述主架驱动机构37包括主架电机371、主架电机371的输出轴连接主架齿轮372,所述主架齿轮372与地面轨道齿条312啮合连接,主架电机371驱动主架32沿地面轨道滑轨311滑动。
201.主架32上设置有主架轨道321,主架轨道321是升降座33的升降轨道。升降座33上设置有升降座滑块331,升降座33通过升降座滑块331连接于主架轨道321,可沿主架轨道321上下滑动。
202.升降座33的驱动、传动机构包括设置于主架32上的升降座驱动机构34、升降座传动机构36;所述升降座传动机构36包括升降座同步带361、上、下两个升降座转轴362,升降座转轴362两端连接有升降座齿轮363,升降座同步带361连接上、下两个升降座齿轮363;升降座33上安装有升降座连接件332,升降座33通过升降座连接件332与升降座同步带361固定连接;升降座驱动机构34包括升降座电机341、升降座驱动同步带342;升降座转轴362上还设置有升降座驱动齿轮343;升降座电机341的输出轴通过升降座驱动同步带342与升降座驱动齿轮343连接,将升降座电机341的输出动力传递至升降座转轴362,带动升降座33沿主架轨道321升降。
203.升降座33用于搭载抓取机构,通常情况下,抓取机构重量大、体积大,升降、移动的稳定性差。为此,本发明专门设计了配重机构35。主架32上安装有配重机构35,所述配重机构35包括安装于主架32上的配重导轨351、设置于配重导轨351上的可沿配重导轨351上下滑动的配重块352;主架32上安装有主架滑轮322、钢丝绳353,所述钢丝绳353绕过主架滑轮322,两端分别连接配重块352和升降座33。
204.实施例9,
205.本实施例中,所述配重导轨351上安装有配重底板356,所述配重底板356上搭载若干配重块352,配重块352开设有“u”形孔,配重导轨351设置于“u”形孔内。所述配重块352开设有通孔,通孔内设置有配重块插条354,配重块插条354底部穿过配重底板356并设置有插
条限位357,对配重块352起限位作用。配重块插条354端部安装有插条挂耳355,升降座33端部设置有升降座挂耳333,钢丝绳353两端分别连接插条挂耳355和升降座挂耳333。
206.升降座33升降过程中,通过在配重导轨351上设置配重块352来抵消部分升降座33的重力,通过搭载不同数量的配重块352来调整抵消重力的大小,提高整个装置的稳定性。
207.实施例10,
208.本实施例中,搬运机构3、选取机构4将试管盒21运送到自动处理台5,自动处理台5对面还设置有人工处理台6。所述自动处理台5上设置有台面51,台面51上设置有用于暂存生物样本试剂盒的暂存区55、设置有扫描仪53,用于对不同的生物样本试管进行扫描记录信息的扫描区52。人工处理台6用于搭载生物样本进行人工处理操作。台面51上设置有对接区54、搬运机构3、选取机构4将试管盒21运送到对接区54,并经中转装置8搬运至人工处理台6或其他指定位置。
209.实施例11,
210.中转装置8包括中转支撑架84及安装于中转支撑架84上的x轴轨道81;安装于x轴轨道81上的、可沿x轴轨道81滑动的y轴轨道82;安装于y轴轨道82上的、可沿y轴轨道82滑动的z轴轨道83;安装于z轴轨道83上的、可沿z轴轨道83滑动的z轴搭载板831;设置于y轴轨道82行程上的自动处理台85;z轴搭载板831上安装有机械手7。
211.试管盒中搭载有若干试剂管,机械手的抓取对象是试管盒,为此,本发明设计了生物样本库样本中转装置,包括用于夹取试管盒的机械手手臂74、用于驱动机械手手臂74完成夹取动作的机械手驱动电机71、机械手传动机构76。
212.机械手手臂74有两条,包括第一机械手手臂741、第二机械手手臂742;机械手传动机构76包括第一机械手齿条761、第二机械手齿条762以及设置于第一机械手齿条761、第二机械手齿条762中间的与第一机械手齿条761、第二机械手齿条762啮合的驱动齿轮轴763。
213.第一机械手手臂741、第二机械手手臂742分别与第一机械手齿条761、第二机械手齿条762固定连接。驱动齿轮轴763与机械手驱动电机71连接。
214.抓取过程如下:驱动电机71带动驱动齿轮轴763旋转,驱动第一机械手齿条761、第二机械手齿条762向相反方向滑动,使第一机械手手臂741、第二机械手手臂742张开,生物样本试剂管抓取机械手由其它机构带动至所要抓取的试管盒77的位置,继续控制驱动电机71反向转动,使第一机械手手臂741、第二机械手手臂742夹紧试管盒77,并由其它机构带动将试管盒77移动至指定位置。
215.机械手7设置第一限位块751、第二限位块752,第一机械手手臂741通过第一限位块751连接第一机械手齿条761,第二机械手手臂742通过第二限位块752连接第二机械手齿条762,第一限位块751、第二限位块752对第一机械手手臂741、第二机械手手臂742起至限位作用,避免接触碰撞。
216.第一机械手齿条761、第二机械手齿条762外侧设置有封装壳72,所述封装壳72内部设置有机械手滑轨73,所述机械手滑轨73包括第一机械手滑轨731、第二机械手滑轨732,第一机械手齿条761、第二机械手齿条762分别通过滑条连接于第一机械手滑轨731、第二机械手滑轨732内,使滑动动作顺畅,效率大大提升。
217.机械手7的移动需要依靠x轴轨道81、y轴轨道82、z轴轨道83的搭载,所述x轴轨道81上安装有x轴齿条811,y轴轨道82上对应安装有x轴电机812,x轴电机812的输出轴连接有
与x轴齿条811啮合的x轴齿轮813,由x轴电机812带动y轴轨道82沿x轴轨道81滑动。
218.所述y轴轨道82上安装有可沿y轴轨道82滑动的z轴轨道83,z轴轨道83上设置有y轴电机823,y轴电机823的输出轴连接y轴齿轮824;y轴轨道82上设置有与y轴齿轮824啮合的y轴齿条822;y轴电机823带动z轴轨道83沿y轴轨道82滑动。
219.所述z轴轨道83上安装有z轴电机832,z轴电机832的输出轴连接z轴齿轮833;z轴搭载板831上安装有与z轴齿轮833啮合的z轴齿条834;由z轴电机832带动z轴搭载板831、机械手87沿z轴轨道83滑动。
220.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1