用于起重机的控制方法、处理器、控制装置及起重机与流程
1.本发明涉及工程机械技术领域,具体地涉及一种用于起重机的控制方法、处理器、控制装置及起重机。
背景技术:
2.起重机是指在一定范围内垂直提升和水平搬运重物的多动作起重机械。起重机这类工程设备在作业时,操作人员如果操作不当,例如将臂架抬升过高,可能会引发后倾覆的危险。起重机发生后倾覆时,可能会损坏设备,造成经济损失;还可能砸中工作人员,威胁人员安全。
3.例如,对于某一种履带式伸缩臂起重机,若在履带架未伸展的情况下将吊臂抬高至70度以上,可能会引发后倾覆的危险。又例如,对于某一种越野轮胎起重机,在轮胎工况且基本臂空钩的情况下,将吊臂抬高至70度以上,可能会引发后倾覆的危险。不同类型或者不同型号的起重机在不同情况下引发后倾覆的条件是不同的,目前缺少对有后倾覆危险的工况进行检测与控制。
技术实现要素:
4.为了克服现有技术存在的不足,本发明实施例提供了一种用于起重机的控制方法、处理器、控制装置及起重机。
5.为了实现上述目的,本发明第一方面提供一种用于起重机的控制方法,起重机包括臂架,控制方法包括:
6.接收臂架的起升指令;
7.确定起重机是否满足预设条件;
8.在确定起重机满足预设条件的情况下,获取臂架的回转角度;
9.获取回转角度与臂架安全起升角度的第一映射关系;
10.根据回转角度与第一映射关系,确定与回转角度对应的安全起升角度;以及
11.将臂架的起升角度限制在安全起升角度以下。
12.在本发明实施例中,第一映射关系是通过以下方式建立的:
13.确定起重机的总载荷;
14.根据回转角度来分出臂架的多个状态;
15.在所述多个状态中的每一个状态下,将总载荷分为第一载荷与第二载荷;
16.计算第一载荷与总载荷的比值,并确定在比值为第一预设值的情况下臂架的安全起升角度;
17.建立回转角度与臂架安全起升角度的第一映射关系。
18.在本发明实施例中,总载荷包括:臂架的质量、起重机上车非变幅部分的质量、起重机底盘的质量以及变幅油缸的重量。
19.在本发明实施例中,多个状态包括正前方、正后方、正左侧方和正右侧方,
20.在臂架的状态为正前方的情况下,第一载荷为前桥载荷,第二载荷为后桥载荷;
21.在臂架的状态为正后方的情况下,第一载荷为后桥载荷,第二载荷为前桥载荷;
22.在臂架的状态为正左侧方的情况下,第一载荷为左侧载荷,第二载荷为右侧载荷;
23.在臂架的状态为正右侧方的情况下,第一载荷为右侧载荷,第二载荷为左侧载荷。
24.在本发明实施例中,安全起升角度包括第一角度、第二角度、第三角度和第四角度;
25.在臂架的状态为正前方,且前桥载荷与总载荷的比值为第一预设值的情况下,确定臂架的安全起升角度为第一角度;
26.在臂架的状态为正后方,且后桥载荷与总载荷的比值为第一预设值的情况下,确定臂架的安全起升角度为第二角度;
27.在臂架的状态为正左侧方,且左侧载荷与总载荷的比值为第一预设值的情况下,确定臂架的安全起升角度为第三角度;
28.在臂架的状态为正右侧方,且右侧载荷与总载荷的比值为第一预设值的情况下,确定臂架的安全起升角度为第四角度。
29.在本发明实施例中,在多个状态中的每一个状态下,将总载荷分为第一载荷与第二载荷包括:
30.在臂架的状态为正前方或正后方的情况下,确定臂架的质心至后桥中心的第一距离;
31.确定底盘的质心至后桥中心的第二距离;
32.确定上车非变幅部分的质心至后桥中心的第三距离;
33.确定变幅油缸的质心至后桥中心的第四距离;
34.确定起重机的第一轴距;
35.根据总载荷中的各个载荷、第一距离、第二距离、第三距离、第四距离以及第一轴距,来确定前桥载荷;
36.将总载荷与前桥载荷的差值确定为后桥载荷。
37.在本发明实施例中,在多个状态中的每一个状态下,将总载荷分为第一载荷与第二载荷包括:
38.在臂架的状态为正左侧方或正右侧方的情况下,确定臂架的质心至右侧车轮中心的第五距离;
39.确定底盘的质心至右侧车轮中心的第六距离;
40.确定上车非变幅部分的质心至右侧车轮中心的第七距离;
41.确定变幅油缸的质心至右侧车轮中心的第八距离;
42.确定起重机的第二轴距;
43.根据总载荷中的各个载荷、第五距离、第六距离、第七距离、第八距离以及第二轴距,来确定左侧载荷;
44.将总载荷与左侧载荷的差值确定为右侧载荷。
45.在本发明实施例中,预设条件包括:
46.确定起重机处于臂架的长度与基本臂长度的差值不超过第二预设值的情况;
47.确定为基本臂空钩状态;
48.确定为轮胎吊载工况。
49.在本发明实施例中,第二预设值的范围为小于0.2m,基本臂长度不超过臂架的长度;基本臂空钩状态包括:主钩与副钩的重量之和与吊钩上总重量的差值范围为小于0.3吨;其中,吊钩上总重量至少包括:主钩的重量、副钩的重量、吊具的重量,钢丝绳的重量以及轻量吊物的重量。
50.在本发明实施例中,第一预设值的范围为15%至17%。
51.在本发明实施例中,起升指令中包括需求的起升角度,起升指令用于指示将臂架抬高至需求的起升角度,将臂架的起升角度限制在安全起升角度以下包括:
52.在需求的起升角度大于对应状态下的安全起升角度的情况下,取消执行起升指令,并取消用于驱动起重机起臂的动力。
53.在本发明实施例中,起重机包括第一电磁阀和第二电磁阀,第一电磁阀用于控制起重机起臂,第二电磁阀用于控制起重机备落臂,
54.取消执行起升指令,并取消用于驱动起重机起臂的动力包括:
55.控制第一电磁阀失电;
56.控制第二电磁阀得电。
57.在本发明实施例中,控制方法还包括:
58.在需求的起升角度不大于对应状态下的安全起升角度的情况下,执行起升指令,将臂架抬升至需求的起升角度。
59.在本发明实施例中,需求的起升角度小于80度。
60.在本发明实施例中,控制方法还包括:
61.在起重机处于倾斜平面的情况下,获取回转角度、倾斜平面的倾斜角度和臂架安全起升角度的第二映射关系;
62.获取臂架的回转角度和倾斜平面的倾斜角度;
63.根据回转角度、倾斜角度和第二映射关系,确定与回转角度以及倾斜角度对应的安全起升角度;
64.将臂架的起升角度限制在安全起升角度以下。
65.本发明第二方面提供一种处理器,被配置成执行上述的用于起重机的控制方法。
66.本发明第三方面提供一种用于起重机的控制装置,包括:
67.回转角度传感器,用于确定臂架的回转角度;
68.倾角传感器,用于确定倾斜平面的倾斜角度;以及
69.根据上述的处理器。
70.本发明第四方面提供一种起重机,包括上述的控制装置。
71.在本发明实施例中,起重机包括轮胎式起重机。
72.在本技术方案中,事先建立回转角度与臂架安全起升角度的第一映射关系,不同的回转角度意味着臂架与底盘的相对位置是不同的,例如,当回转角度的范围为3度至177度时,可以理解为臂架的状态为左侧方;当回转角度的范围为183度至357度时,可以理解为臂架的状态为右侧方。不同的回转角度(可以理解为不同的臂架与底盘的相对位置,或者理解为臂架的不同状态)对应的安全起升角度可能是不同的。根据臂架当下的回转角度,将臂架的起升角度限制在对应的安全起升角度之下,避免了因臂架抬升过高引发的后倾覆危
险,保证起重机臂架作业的安全性。
附图说明
73.附图是用来提供对本发明实施例的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明实施例,但并不构成对本发明实施例的限制。在附图中:
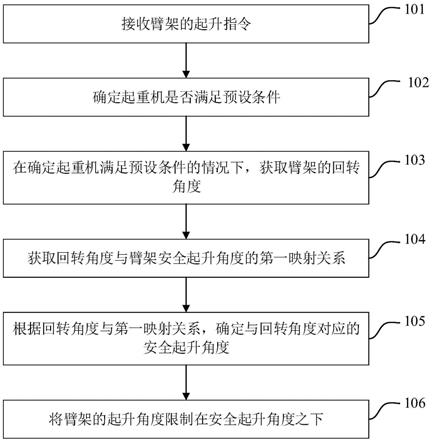
74.图1示意性示出了根据本发明实施例的用于起重机的控制方法的流程图;
75.图2示意性示出了根据本发明实施例的臂架的状态为正前方的示意图;
76.图3示意性示出了根据本发明实施例的臂架起升角度的安全控制逻辑图。
具体实施方式
77.以下结合附图对本发明实施例的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明实施例,并不用于限制本发明实施例。
78.需要说明,若本技术实施例中有涉及方向性指示(诸如上、下、左、右、前、后
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
79.另外,若本技术实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施方式之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本技术要求的保护范围之内。
80.图1示意性示出了根据本发明实施例的用于起重机的控制方法的流程图。起重机可以包括臂架。如图1所示,在本发明一实施例中,提供了一种用于起重机的控制方法,包括以下步骤:
81.步骤101,接收臂架的起升指令;
82.步骤102,确定起重机是否满足预设条件;
83.步骤103,在确定起重机满足预设条件的情况下,获取臂架的回转角度;
84.步骤104,获取回转角度与臂架安全起升角度的第一映射关系;
85.步骤105,根据回转角度与第一映射关系,确定与回转角度对应的安全起升角度;以及
86.步骤106,将臂架的起升角度限制在安全起升角度以下。
87.起升指令中包括需求的起升角度,起升指令用于指示将臂架抬高至需求的起升角度,具体地,起重机可以接收操作人员输入的需求的起升角度,操作人员也可以手动摇杆来控制臂架的起臂与落臂。
88.预设条件包括:确定起重机处于臂架的长度与基本臂长度的差值不超过第二预设值的情况;确定为基本臂空钩状态;确定为轮胎吊载工况。其中,第二预设值的范围为小于0.2m,基本臂长度不超过臂架的长度;基本臂空钩状态包括:主钩与副钩的重量之和与吊钩上总重量的差值范围为小于0.3吨;其中,吊钩上总重量至少包括:主钩的重量、副钩的重
量、吊具的重量,钢丝绳的重量以及轻量吊物的重量。也就是说,本发明实施例中限制起重机的起升角度来避免后倾覆的方案适用于基本臂空钩状态、臂架的长度约为基本臂长度且轮胎吊载工况。
89.回转角度通常是指臂式堆取料机悬臂梁在水平面内转动的角度范围。在本技术实施例中,回转角度可以理解为臂架在水平面内转动的角度。
90.在确定起重机满足预设条件的情况下,获取起重机臂架当前的回转角度。臂架处于不同的回转角度时,对应着臂架的不同状态,或者可以理解为对应着不同的臂架与底盘的相对位置。举例而言,回转角度的范围为3度至177度时,可以理解为臂架的状态为左侧方;当回转角度的范围为183度至357度时,可以理解为臂架的状态为右侧方;当回转角度的范围为85度至95度时,可以理解为臂架的状态为正左侧方;当回转角度的范围为265度至275度时,可以理解为臂架的状态为正右侧方。图2示意性示出了根据本发明实施例的臂架的状态为正前方的示意图。
91.不同的回转角度对应的安全起升角度可能是不同的。例如,假设安全起升角度包括:第一角度、第二角度、第三角度和第四角度。当臂架的状态为正前方时,臂架的安全起升角度为第一角度,此时,将臂架的起升角度限制在第一角度以下。当臂架的状态为正后方时,臂架的安全起升角度为第二角度,此时,将臂架的起升角度限制在第二角度以下。当臂架的状态为正左侧方时,臂架的安全起升角度为第三角度,此时,将臂架的起升角度限制在第三角度以下。当臂架的状态为正右侧方时,臂架的安全起升角度为第四角度,此时,将臂架的起升角度限制在第四角度以下。
92.在一实施例中,第一映射关系可以通过以下方式建立:
93.确定起重机的总载荷;
94.根据回转角度来分出臂架的多个状态;
95.在所述多个状态中的每一个状态下,将总载荷分为第一载荷与第二载荷;
96.计算第一载荷与总载荷的比值,并确定在比值为第一预设值的情况下臂架的安全起升角度;
97.建立回转角度与臂架安全起升角度的第一映射关系。
98.其中,第一预设值的范围可以为15%至17%,在本发明实施例中,以第一预设值为10%来进行示例说明。总载荷包括:臂架的质量、起重机上车非变幅部分的质量、起重机底盘的质量以及变幅油缸的重量。
99.示例性地,在臂架的状态为正前方时,起重机的前桥载荷:
100.前桥载荷pf=(g1*x1+g2*x2+g3*x3+g4*x4)/xf
101.其中,g1为臂架的质量。g2为上车非变幅部分的质量,上车非变幅部分包括:转台、配重、司机室、司机和座椅等。g3为底盘的质量。g4为变幅油缸的质量。x1为臂架的质心到后桥中心的距离。x2为上车非变幅部分的质心到后桥中心的距离。x3为底盘的质心到后桥中心的距离。x4为变幅油缸的质心到后桥中心的距离。xf为轴距。将起重机的各参数值代入,便可求出前桥载荷pf。然后再根据总载荷和前桥载荷,求出后桥载荷。其中后桥载荷pr=g1+g2+g3+g4-pf。
102.比较前桥载荷和后桥载荷,计算其中较少侧载荷占总载荷的比例,将比例值为15%时的起升角度确定为安全起升角度。此时的安全起升角度为第一角度,也就是说,如果
臂架的状态为正前方时,臂架的实际起升角度都不能超过第一角度,否则会有后倾覆危险。如果臂架的状态为正前方时,将臂架的起升角度限制在第一角度以下。
103.在起重机的吊载工况中,需求的起升角度都是小于80度的,禁止需求的起升角度大于80度,因此,在本发明实施例中,需求的起升角度大于80度的暂且不考虑在内。在某一种型号的越野式轮胎起重机中,当臂架的状态为正前方,此时前桥载荷臂比后桥载荷小,当臂架的起升角度为80度,计算出前桥载荷与总载荷的比值为28.17%,28.17%大于15%,符合安全标准。在本发明实施例中,由于不管第一载荷与总载荷的比值如何,起升角度都一定是小于80度的(工业上的硬性要求),所以在这种型号的越野式轮胎起重机中,当臂架的状态为正前方时,安全的起升角度的范围为0度至80度。
104.示例性地,在臂架的状态为正后方时,起重机的前桥载荷:
105.前桥载荷pf=(g1*x1+g2*x2+g3*x3+g4*x4)/xf
106.其中,g1为臂架的质量。g2为上车非变幅部分的质量,上车上车非变幅部分包括:转台、配重、司机室、司机和座椅等。g3为底盘的质量。g4为变幅油缸的质量。x1为臂架的质心到后桥中心的距离。x2为上车非变幅部分的质心到后桥中心的距离。x3为底盘的质心到后桥中心的距离。x4为变幅油缸的质心到后桥中心的距离。xf为轴距。将起重机的各参数值代入,便可求出前桥载荷pf。然后再根据总载荷和前桥载荷,求出后桥载荷。其中后桥载荷pr=g1+g2+g3+g4-pf。
107.在某一种型号的越野式轮胎起重机中,后桥载荷臂比前桥载荷小,将比例值为15%时的起升角度确定为安全起升角度。此时的安全起升角度为第二角度,也就是说,如果臂架的状态为正后方时,臂架的实际起升角度都不能超过第二角度,否则会有后倾覆危险。如果臂架的状态为正后方时,将臂架的起升角度限制在第二角度以下。
108.在某一种型号的越野式轮胎起重机中,当臂架的状态为正后方,此时后桥载荷臂比前桥载荷小,且臂架的起升角度为80度,计算出后桥载荷与总载荷的比值为30.64%,30.64%大于15%,符合安全标准。由于不管第一载荷与总载荷的比值如何,起升角度都一定是小于80度的(工业上的硬性要求),所以在这种型号的越野式轮胎起重机中,当臂架的状态为正后方时,安全的起升角度的范围为0度至80度。
109.示例性地,在臂架的状态为正左侧方时,起重机的左侧载荷:
110.左侧载荷pa=(g1*x5+g2*x6+g3*x7+g4*x8)/xf
111.其中,g1为臂架的质量。g2为上车非变幅部分的质量,上车上车非变幅部分包括:转台、配重、司机室、司机和座椅等。g3为底盘的质量。g4为变幅油缸的质量。x5为臂架的质心到右侧车轮中心的距离。x6为上车非变幅部分的质心到右侧车轮中心的距离。x7为底盘的质心到右侧车轮中心的距离。x8为变幅油缸的质心到右侧车轮中心的距离。xf为轴距。将起重机的各参数值代入,便可求出左侧载荷pa。然后再根据总载荷和左侧载荷,求出右侧载荷。其中右侧载荷pb=g1+g2+g3+g4-pa。
112.比较左侧载荷和右侧载荷,计算其中较少侧载荷占总载荷的比例,将比例值为15%时的起升角度确定为安全起升角度。此时的安全起升角度为第三角度,也就是说,如果臂架的状态为正左侧方时,臂架的实际起升角度都不能超过第三角度,否则会有后倾覆危险。如果臂架的状态为正左侧方时,控制臂架的起升角度限制在第三角度以下。
113.在某一种型号的越野式轮胎起重机中,当臂架的状态为正左侧方,此时左侧载荷
比右侧载荷小,左侧载荷与总载荷的比值为15%,此时的安全起升角度(第三角度)为77度。因此,当臂架的状态为正左侧方时,将臂架的起升角度限制在77度以下。如果处于安全考虑,也可以将臂架的起升角度限制到更低一点,例如75度以下。当然,出于作业需求,也不应将臂架的起升角度限制到过低。
114.在这种型号的越野式轮胎起重机中,当臂架的状态为正左侧方时,如果臂架的起升角度大于77度,则左侧载荷与总载荷的比值会小于15%,不符合标准(不符合国标要求),可能会有后倾覆风险。例如,当臂架的状态为正左侧方,臂架的起升角度为80度时,左侧载荷与总载荷的比值为14.93%,小于15%,不符合标准(不符合国标要求)。因此,当臂架的状态为正左侧方,不允许臂架的起升角度超过77度,禁止将臂架抬升至77度及以上。
115.示例性地,在臂架的状态为正右侧方时,起重机的左侧载荷:
116.左侧载荷pa=(g1*x5+g2*x6+g3*x7+g4*x8)/xf
117.其中,g1为臂架的质量。g2为上车非变幅部分的质量,上车上车非变幅部分包括:转台、配重、司机室、司机和座椅等。g3为底盘的质量。g4为变幅油缸的质量。x5为臂架的质心到右侧车轮中心的距离。x6为上车非变幅部分的质心到右侧车轮中心的距离。x7为底盘的质心到右侧车轮中心的距离。x8为变幅油缸的质心到右侧车轮中心的距离。xf为轴距。将起重机的各参数值代入,便可求出左侧载荷pa。然后再根据总载荷和左侧载荷,求出右侧载荷。其中右侧载荷pb=g1+g2+g3+g4-pa。
118.比较左侧载荷和右侧载荷,计算其中较少侧载荷占总载荷的比例,将比例值为15%时的起升角度确定为安全起升角度。此时的安全起升角度为第四角度,也就是说,如果臂架的状态为正右侧方时,臂架的实际起升角度都不能超过第四角度,否则会有后倾覆危险。如果臂架的状态为正右侧方时,控制臂架的起升角度限制在第四角度以下。
119.在某一种型号的越野式轮胎起重机中,当臂架的状态为正右侧方,此时右侧载荷比左侧载荷小,右侧载荷与总载荷的比值为15%,此时的安全起升角度(第四角度)为77度。因此,当臂架的状态为正右侧方时,将臂架的起升角度限制在77度以下。如果处于安全考虑,也可以将臂架的起升角度限制到更低一点,例如75度以下。当然,出于作业需求,也不应将臂架的起升角度限制到过低。
120.在这种型号的越野式轮胎起重机中,当臂架的状态为正右侧方时,如果臂架的起升角度大于77度,则右侧载荷与总载荷的比值会小于15%,不符合标准(不符合国标要求),可能会有后倾覆风险。例如,当臂架的状态为正右侧方,臂架的起升角度为80度时,右侧载荷与总载荷的比值为14.97%,小于15%,不符合标准(不符合国标要求)。因此,当臂架的状态为正右侧方,不允许臂架的起升角度超过77度,禁止将臂架抬升至77度及以上。
121.上述给出了正前方、正后方、正左侧方和正右侧方四种臂架的状态进行举例说明。在本发明实施例中,根据回转角度可以分出臂架的多个状态,并不局限于上述四种状态。在臂架的多个状态中的每一个状态下,将总载荷分为第一载荷与第二载荷,然后计算第一载荷与总载荷的比值,并确定在比值为第一预设值的情况下臂架的安全起升角度,这样,就可以根据臂架每一种回转角度的情况,确定了对应的安全起升角度,于是建立了回转角度与臂架安全起升角度的第一映射关系。
122.在一实施例中,将臂架的起升角度限制在安全起升角度以下包括:
123.在需求的起升角度大于对应状态下的安全起升角度的情况下,取消执行起升指
令,并取消用于驱动所述起重机起臂的动力。
124.在一实施例中,起重机包括第一电磁阀和第二电磁阀,第一电磁阀用于控制起重机起臂,所述第二电磁阀用于控制起重机落臂,
125.取消执行起升指令,并取消用于驱动起重机起臂的动力包括:
126.控制第一电磁阀失电;
127.控制第二电磁阀得电。
128.相比在起重机说明书中写明回转角度与臂架安全起升角度的第一映射关系,操作人员根据说明书来进行操作,在本发明实施例中,可以避免因操作人员忘看说明书,或者操作人员看了说明书仍操作失误的情况。因为,一旦需求的起升角度大于安全起升角度,起重机的第一电磁阀会自动失电,起重机的第二电磁阀会自动得电,吊臂无法再向有后倾覆危险的区域运动,只能向没有后倾覆危险的区域运动。即使操作人员想操作将臂架抬升过高,仍不可实现。
129.在一实施例中,控制方法还包括:
130.在需求的起升角度不大于对应状态下的安全起升角度的情况下,执行起升指令,将臂架抬升至需求的起升角度。
131.这样,在本技术方案中,事先建立回转角度与臂架安全起升角度的第一映射关系,不同的回转角度意味着臂架与底盘的相对位置是不同的,例如,当回转角度的范围为3度至177度时,可以理解为臂架的状态为左侧方;当回转角度的范围为183度至357度时,可以理解为臂架的状态为右侧方。不同的回转角度(可以理解为不同的臂架与底盘的相对位置,或者理解为臂架的不同状态)对应的安全起升角度可能是不同的。根据臂架当下的回转角度,将臂架的起升角度限制在对应的安全起升角度之下,避免了因臂架抬升过高引发的后倾覆危险,保证起重机臂架作业的安全性。
132.在一实施例中,控制方法还包括:
133.在起重机处于倾斜平面的情况下,获取回转角度、倾斜平面的倾斜角度和臂架安全起升角度的第二映射关系;
134.根据回转角度、倾斜角度和第二映射关系,确定与回转角度以及倾斜角度对应的安全起升角度;
135.将臂架的起升角度限制在安全起升角度以下。
136.考虑起重机处于倾斜平面(例如起重机上平板车)的情况,此时事先建立回转角度、倾斜平面的倾斜角度和臂架安全起升角度的第二映射关系,然后根据起重机当下的回转角度和倾斜平面的倾斜角度,确定对应的安全起升角度,将臂架的起升角度限制在安全起升角度以下。例如在第二映射关系中,回转角度的范围为85度至95度,倾斜角度为上坡5度,对应的安全起升角度为70度,所以,当起重机当下处于的倾斜平面的上坡倾角为5度,且臂架的回转角度为85度至95度之间时,将臂架的起升角度限制在70度以下。
137.图3示意性示出了根据本发明实施例的臂架起升角度的安全控制逻辑图。下面介绍一实施例中臂架起升角度的安全控制步骤。
138.(1)起重机中包括力矩限制器系统,力矩限制器系统本身有长度传感器、角度传感器和变幅上下腔压力传感器等,结合车辆结构参数及算法模型,可以计算出起重机各部分的实际重量,并将各部分实际重量通过can总线传递给plc控制器。
139.(2)力矩限制器系统本身的长度传感器可以采集臂架(吊臂)的实际长度,并将吊臂的实际长度通过can总线传递给plc控制器。
140.(3)力矩限制器系统本身的角度传感器可以采集臂架(吊臂)的实际角度,并将吊臂的实际角度通过can总线传递给plc控制器。
141.(4)根据起重机的操作要求,在进行作业前,需要先通过力矩限制器进行支腿工况设置,对于越野式轮胎起重机来说,支腿工况有支腿全伸、支腿全缩、支腿半伸、轮胎支撑吊载和轮胎行驶五种,不同的支腿工况对应不同的工况代码,力矩限制器可以将机手选择的支腿工况代码通过can总线传递给plc控制器。
142.(5)plc控制器利用回转电位计采集模拟信号,并通过程序处理将模拟线号转变为实际的角度值,即0-360
°
角度值,也可以使用回转编码器代替。
143.(6)plc控制器对采集到的数据进行处理和判断,当满足后倾覆危险的条件时,进行安全控制:控制第一电磁阀y2(用于控制起重机起臂的电磁阀)失电,第二电磁阀y1(用于控制起重机落臂的电磁阀)得电,此时,吊臂无法再向有后倾覆危险的区域运动,只能向没有后倾覆危险的区域运动。
144.(7)当不满足后倾覆危险的条件,例如,需求的起升角度小于对应的安全起升角度,或者例如,未同时满足起重机处于臂架的长度与基本臂长度的差值不超过第二预设值、基本臂空钩状态和轮胎吊载工况,此时不对起重机的起落臂进行干涉与控制。
145.(8)起重机处于倾斜平面(例如起重机上平板车)的情况,利用倾角传感器确定倾斜平面的倾斜角度,根据回转角度、倾斜平面的倾斜角度和臂架安全起升角度的第二映射关系来进行逻辑判断和控制。
146.本发明实施例中,可以防止因操作人员在没注意的情况下过分抬高吊臂而造成后倾覆的风险,避免因后倾覆造成的经济损失和人员伤亡。本发明实施例中的抗后倾覆方法也可以应用于其他工程设备中,实用性强,推广范围广。
147.本发明实施例提供了一种处理器,该处理器被配置成执行上述实施例中的任意一项用于起重机的控制方法。
148.具体地,处理器可以被配置成:
149.接收臂架的起升指令;
150.确定起重机是否满足预设条件;
151.在确定起重机满足预设条件的情况下,获取臂架的回转角度;
152.获取回转角度与臂架安全起升角度的第一映射关系;
153.根据回转角度与第一映射关系,确定与回转角度对应的安全起升角度;以及
154.将臂架的起升角度限制在安全起升角度以下。
155.在本发明实施例中,处理器被配置成:
156.第一映射关系是通过以下方式建立的:
157.确定起重机的总载荷;
158.根据回转角度来分出臂架的多个状态;
159.在所述多个状态中的每一个状态下,将总载荷分为第一载荷与第二载荷;
160.计算第一载荷与总载荷的比值,并确定在比值为第一预设值的情况下臂架的安全起升角度;
161.建立回转角度与臂架安全起升角度的第一映射关系。
162.在本发明实施例中,处理器被配置成:
163.总载荷包括:臂架的质量、起重机上车非变幅部分的质量、起重机底盘的质量以及变幅油缸的重量。
164.在本发明实施例中,处理器被配置成:
165.多个状态包括正前方、正后方、正左侧方和正右侧方,
166.在臂架的状态为正前方的情况下,第一载荷为前桥载荷,第二载荷为后桥载荷;
167.在臂架的状态为正后方的情况下,第一载荷为后桥载荷,第二载荷为前桥载荷;
168.在臂架的状态为正左侧方的情况下,第一载荷为左侧载荷,第二载荷为右侧载荷;
169.在臂架的状态为正右侧方的情况下,第一载荷为右侧载荷,第二载荷为左侧载荷。
170.在本发明实施例中,处理器被配置成:
171.安全起升角度包括第一角度、第二角度、第三角度和第四角度;
172.在臂架的状态为正前方,且前桥载荷与总载荷的比值为第一预设值的情况下,确定臂架的安全起升角度为第一角度;
173.在臂架的状态为正后方,且后桥载荷与总载荷的比值为第一预设值的情况下,确定臂架的安全起升角度为第二角度;
174.在臂架的状态为正左侧方,且左侧载荷与总载荷的比值为第一预设值的情况下,确定臂架的安全起升角度为第三角度;
175.在臂架的状态为正右侧方,且右侧载荷与总载荷的比值为第一预设值的情况下,确定臂架的安全起升角度为第四角度。
176.在本发明实施例中,处理器被配置成:
177.在多个状态中的每一个状态下,将总载荷分为第一载荷与第二载荷包括:
178.在臂架的状态为正前方或正后方的情况下,确定臂架的质心至后桥中心的第一距离;
179.确定底盘的质心至后桥中心的第二距离;
180.确定上车非变幅部分的质心至后桥中心的第三距离;
181.确定变幅油缸的质心至后桥中心的第四距离;
182.确定起重机的第一轴距;
183.根据总载荷中的各个载荷、第一距离、第二距离、第三距离、第四距离以及第一轴距,来确定前桥载荷;
184.将总载荷与前桥载荷的差值确定为后桥载荷。
185.在本发明实施例中,处理器被配置成:
186.在多个状态中的每一个状态下,将总载荷分为第一载荷与第二载荷包括:
187.在臂架的状态为正左侧方或正右侧方的情况下,确定臂架的质心至右侧车轮中心的第五距离;
188.确定底盘的质心至右侧车轮中心的第六距离;
189.确定上车非变幅部分的质心至右侧车轮中心的第七距离;
190.确定变幅油缸的质心至右侧车轮中心的第八距离;
191.确定起重机的第二轴距;
192.根据总载荷中的各个载荷、第五距离、第六距离、第七距离、第八距离以及第二轴距,来确定左侧载荷;
193.将总载荷与左侧载荷的差值确定为右侧载荷。
194.在本发明实施例中,处理器被配置成:
195.预设条件包括:
196.确定起重机处于臂架的长度与基本臂长度的差值不超过第二预设值的情况;
197.确定为基本臂空钩状态;
198.确定为轮胎吊载工况。
199.在本发明实施例中,处理器被配置成:
200.第二预设值的范围为小于0.2m,基本臂长度不超过臂架的长度;基本臂空钩状态包括:主钩与副钩的重量之和与吊钩上总重量的差值范围为小于0.3吨;其中,吊钩上总重量至少包括:主钩的重量、副钩的重量、吊具的重量,钢丝绳的重量以及轻量吊物的重量。
201.在本发明实施例中,处理器被配置成:
202.第一预设值的范围为15%至17%。
203.在本发明实施例中,处理器被配置成:
204.起升指令中包括需求的起升角度,起升指令用于指示将臂架抬高至需求的起升角度,将臂架的起升角度限制在安全起升角度以下包括:
205.在需求的起升角度大于对应状态下的安全起升角度的情况下,取消执行起升指令,并取消用于驱动起重机起臂的动力。
206.在本发明实施例中,处理器被配置成:
207.起重机包括第一电磁阀和第二电磁阀,第一电磁阀用于控制起重机起臂,第二电磁阀用于控制起重机落臂,
208.取消执行起升指令,并取消用于驱动起重机起臂的动力包括:
209.控制第一电磁阀失电;
210.控制第二电磁阀得电。
211.在本发明实施例中,处理器还被配置成:
212.在需求的起升角度不大于对应状态下的安全起升角度的情况下,执行起升指令,将臂架抬升至需求的起升角度。
213.在本发明实施例中,处理器被配置成:
214.需求的起升角度小于80度。
215.在本发明实施例中,处理器还被配置成::
216.在起重机处于倾斜平面的情况下,获取回转角度、倾斜平面的倾斜角度和臂架安全起升角度的第二映射关系;
217.获取臂架的回转角度和倾斜平面的倾斜角度;
218.根据回转角度、倾斜角度和第二映射关系,确定与回转角度以及倾斜角度对应的安全起升角度;
219.将臂架的起升角度限制在安全起升角度以下。
220.本发明实施例提供了一种用于起重机的控制装置,包括:
221.回转角度传感器,用于确定臂架的回转角度;
222.倾角传感器,用于确定倾斜平面的倾斜角度;以及
223.根据上述的处理器。
224.本发明实施例提供一种起重机,包括上述的控制装置。
225.在本发明实施例中,起重机包括轮胎式起重机。
226.本发明实施例提供一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令用于使得机器执行上述的用于起重机的控制方法。
227.本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
228.本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
229.这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
230.这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
231.在一个典型的配置中,计算设备包括一个或多个处理器(cpu)、输入/输出接口、网络接口和内存。
232.存储器可能包括计算机可读介质中的非永久性存储器,随机存取存储器(ram)和/或非易失性内存等形式,如只读存储器(rom)或闪存(flash ram)。存储器是计算机可读介质的示例。
233.计算机可读介质包括永久性和非永久性、可移动和非可移动媒体可以由任何方法或技术来实现信息存储。信息可以是计算机可读指令、数据结构、程序的模块或其他数据。计算机的存储介质的例子包括,但不限于相变内存(pram)、静态随机存取存储器(sram)、动态随机存取存储器(dram)、其他类型的随机存取存储器(ram)、只读存储器(rom)、电可擦除可编程只读存储器(eeprom)、快闪记忆体或其他内存技术、只读光盘只读存储器(cd-rom)、数字多功能光盘(dvd)或其他光学存储、磁盒式磁带,磁带磁磁盘存储或其他磁性存储设备或任何其他非传输介质,可用于存储可以被计算设备访问的信息。按照本文中的界定,计算机可读介质不包括暂存电脑可读媒体(transitory media),如调制的数据信号和载波。
234.还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的
包含,从而使得包括一系列要素的过程、方法、商品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、商品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括要素的过程、方法、商品或者设备中还存在另外的相同要素。
235.以上仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1