一种自动化包装设备
1.本发明涉及包装设备技术领域,尤其公开了一种自动化包装设备。
背景技术:
2.目前市场上的缠绕机大多体积比较大,适合大的产品的缠绕打包,如建材,型材,管材等行业,配合自动输送设备,实现产品的高速全自动无人操作的薄膜水平缠绕包装,可有效保持货物稳定,方便运输及储存,减少货物在运输过程中因破损、污染、雨水等因素导致的货物损坏,节省包装时间,降低包装成本。
3.中国专利cn201811391520.4中公开了一种缠绕打包装置,包括夹爪搬运机构、缠绕机构、工件放置机构以及缠绕膜切断机构;所述缠绕机构具有一缠绕工位,所述夹爪搬运机构用于将工件移动至缠绕工位,并将已缠绕工件移出缠绕工位,所述工件放置机构设于缠绕机构一侧,用于自缠绕工位接收工件,并配合所述缠绕机构将缠绕膜缠绕至位于缠绕工位的工件,缠绕膜切断机构用于切断已缠绕工件与缠绕机构之间的缠绕膜。夹爪搬运机构包括x轴移动组件、设于x轴移动组件的第一升降组件以及设于第一升降组件的夹爪组件,夹爪组件用于取放工件。夹爪组件包括夹持电机、设于夹持电机的齿轮、与齿轮啮合的两齿条以及安装于两齿条的两夹爪。夹持电机驱动齿轮转动,迫使两齿条和对应的两夹爪相背运动或相对运动。但是,该夹爪搬运机构易夹伤工件且转运速度慢。
4.因此,现有缠绕打包装置中夹爪搬运机构易夹伤工件且转运速度慢,是一件亟待解决的技术问题。
技术实现要素:
5.本发明提供了一种自动化包装设备,旨在解决现有缠绕打包装置中夹爪搬运机构易夹伤工件且转运速度慢的技术问题。
6.本发明一种自动化包装设备,包括依次设置的间歇下料装置、旋转下料输送装置、间歇旋转下料装置和包装缠绕装置、以及包装控制系统,包装缠绕装置包括第一机架、工件旋转机构、工件转运真空手抓机构和缠绕带抓取机构,工件转运真空手抓机构包括工件转运导轨、工件转运连接板、工件转运手抓伸出齿条、工件转运齿轮、工件转运真空手抓和工件转运手抓电机,工件转运导轨和工件转运手抓伸出齿条相互平行且沿第一机架轴向设置,工件转运连接板设于工件转运导轨上方且可相对工件转运导轨滑动,工件转运手抓电机的主轴穿过工件转运连接板的侧板后套设于工件转运齿轮上,工件转运齿轮与工件转运手抓伸出齿条相啮合,工件转运真空手抓安装于工件转运连接板上,工件转运真空手抓包括连接块及与连接块相连接的真空吸取块,连接块与工件转运连接板固定连接,真空吸取块上设有吸取部及与吸取部相连接用于吸附待包装工件的真空吸口,真空吸口的开口形状与待包装工件的外型相适配,真空吸口的内壁上设有多个真空吸附孔,吸取部上对应设有与多个真空吸附孔相通的真空接口,包装控制系统包括控制器和真空发生器,真空发生器与真空接口相接通,控制器分别与工件转运手抓电机、工件旋转机构、缠绕带抓取机构和真
空发生器电连接,用于控制工件转运手抓电机和真空发生器动作,促使工件转运真空手抓在工件转运导轨上水平滑动,对待包装工件进行真空吸附夹持并将真空吸附夹持的待包装工件放至工件旋转机构上后用于控制工件旋转机构进行旋转,同时驱动缠绕带抓取机构抓取缠绕带,将缠绕带缠绕于旋转的待包装工件上。
7.进一步地,工件旋转机构包括外壳、真空吸附盘、真空吸附盘旋转大齿轮、真空吸附盘驱动齿轮、真空吸附盘驱动电机、真空腔体、真空分配管道、真空管道接口、真空分配固定缸体和真空分配旋转体,真空吸附盘驱动电机的主轴套设于真空吸附盘驱动齿轮上,真空吸附盘驱动齿轮与真空吸附盘旋转大齿轮相啮合,真空吸附盘旋转大齿轮套设于真空腔体上,真空腔体的一端穿过外壳后与真空分配旋转体相连接,真空腔体的另一端与真空分配旋转体相连接,真空分配固定缸体套设于真空分配旋转体的外面,真空管道接口通过真空分配管道与真空腔体相接通,控制器与真空吸附盘驱动电机电连接,用于控制真空吸附盘驱动电机动作,带动真空吸附盘旋转。
8.进一步地,缠绕带抓取机构包括缠绕带平移组件、缠绕带升降组件和缠绕带抓取组件,缠绕带抓取组件设于缠绕带升降组件上,缠绕带升降组件安装于缠绕带平移组件上,缠绕带抓取组件包括拉伸手抓平移连接板、拉伸手爪平移导轨、拉伸手爪安装架、平移丝杠、手爪平移电机、电动推杆、抓取手抓和打包带安装架,缠绕带安装于打包带安装架上,拉伸手爪平移导轨和打包带安装架安装于拉伸手抓平移连接板上且拉伸手爪平移导轨沿拉伸手抓平移连接板轴向设置,拉伸手爪安装架设于拉伸手爪平移导轨上且可相对拉伸手爪平移导轨水平滑动,手爪平移电机通过平移丝杠与拉伸手爪安装架相连接,电动推杆穿过拉伸手爪安装架后与抓取手抓相连接,控制器分别与电动推杆和手爪平移电机电连接,用于控制手爪平移电机动作,促使抓取手抓做轴向移动;并控制电动推杆动作,驱动抓取手抓抓取安装于打包带安装架上的缠绕带。
9.进一步地,抓取手抓包括电动推杆连接杆、连接杆连接座、第一连杆、第二连杆、第一缠绕带夹持手抓和第二缠绕带夹持手抓,第一连杆连接于电动推杆连接杆与第一缠绕带夹持手抓之间,第二连杆连接于电动推杆连接杆与第二缠绕带夹持手抓之间,连接杆连接座罩合于电动推杆连接杆与第一连杆和第二连杆的连接处。
10.进一步地,缠绕带平移组件包括缠绕机构平移导轨、缠绕机构平移电机、缠绕机构平移电机齿轮、缠绕机构平移齿条和连接背板,缠绕机构平移导轨和缠绕机构平移齿条相互平行且沿第一机架水平方向设置,连接背板设于缠绕机构平移导轨上且可相对缠绕机构平移导轨滑动,缠绕机构平移电机的主轴穿过连接背板后套设于缠绕机构平移电机齿轮上,缠绕机构平移电机齿轮与缠绕机构平移齿条相啮合,控制器与缠绕机构平移电机电连接,用于控制缠绕机构平移电机动作,带动缠绕带抓取机构做水平移动。
11.进一步地,缠绕带升降组件包括缠绕机构升降导轨、缠绕机构升降电机、缠绕机构升降电机齿轮和缠绕机构升降齿条,缠绕机构升降导轨和缠绕机构升降齿条相互平行且沿连接背板水平方向设置,拉伸手抓平移连接板设于缠绕机构升降导轨上且可相对缠绕机构升降导轨滑动,缠绕机构升降电机齿轮的主轴穿过拉伸手抓平移连接板后套设于缠绕机构升降电机齿轮上,缠绕机构升降电机齿轮与缠绕机构升降齿条相啮合,控制器与缠绕机构升降电机电连接,用于控制缠绕机构升降电机动作,带动缠绕带抓取机构做升降运动。
12.进一步地,间歇下料装置包括第二机架、倾斜下料板、固定齿形输送板、移动齿形
输送板、摇杆、同步带轮、驱动电机和动力输送轴,倾斜下料板设于第二机架的端部,两块固定齿形输送板分别位于第二机架的两侧,两块移动齿形输送板位于两块固定齿形输送板之间,驱动电机与动力输送轴相连接,两侧的同步带轮分别套设于动力输送轴上,且两侧的同步带轮通过各自相对应的摇杆分别与其两侧的移动齿形输送板相连接,控制器与驱动电机电连接,用于控制驱动电机动作,带动两块移动齿形输送板做圆周运动,驱动待包装工件移动至旋转下料输送装置处。
13.进一步地,旋转下料输送装置包括旋转驱动电机、旋转驱动电机安装板、旋转驱动齿轮、旋转大齿轮、支撑立柱、物料输送辊子电机、物料输送辊子、辊子安装板和物料下料口,支撑立柱设于物料下料口的下方,两组物料输送辊子分别围绕于支撑立柱的两侧上方,旋转驱动电机的主轴穿过旋转驱动电机安装板后套设于旋转驱动齿轮上,旋转大齿轮与旋转驱动齿轮相啮合,旋转大齿轮与支撑立柱相连接,控制器分别与旋转驱动电机和物料输送辊子电机电连接,用于控制旋转驱动电机动作,带动支撑立柱支撑的待包装工件进行水平转向;并控制物料输送辊子电机动作,将水平方向放置的待包装工件转换向竖直方向放置于间歇旋转下料装置上。
14.进一步地,间歇旋转下料装置包括依次设置的间歇送料机构和间歇水平输送机构,间歇送料机构包括物料移动托板、间歇旋转下料连接板、物料阻挡仿形板、间歇旋转下料驱动减速电机、间歇旋转下料驱动轮轴、间歇旋转下料槽轮拨杆、间歇旋转下料驱动轮、间歇旋转下料槽轮、间歇旋转下料槽轮轴和间歇旋转下料柜槽轮连接板,间歇旋转下料驱动减速电机的主轴穿过间歇旋转下料柜槽轮连接板后与间歇旋转下料驱动轮轴相连接,间歇旋转下料驱动轮轴套设于间歇旋转下料驱动轮和间歇旋转下料槽轮拨杆上,间歇旋转下料槽轮套设于间歇旋转下料槽轮轴上且分别与间歇旋转下料驱动轮和间歇旋转下料槽轮拨杆相配合,间歇旋转下料槽轮轴穿过物料移动托板后与间歇旋转下料连接板相连接,多个物料阻挡仿形板沿间歇旋转下料连接板的周向均匀设置,控制器与间歇旋转下料驱动减速电机电连接,用于控制间歇旋转下料驱动减速电机动作,带动间歇旋转下料连接板做间歇旋转运动。
15.进一步地,间歇水平输送机构包括输送带电机、输送带、输送带安装板、输送驱动轮和输送从动轮,输送驱动轮和输送从动轮分别安装于输送带安装板上,输送带电机的主轴穿过输送带安装板后与输送驱动轮相连接,输送带披覆于输送驱动轮和输送从动轮上,控制器与输送带电机电连接,用于控制输送带电机动作,在输送带的驱动下将待包装工件进行轴向运输。
16.本发明所取得的有益效果为:
17.本发明公开一种自动化包装设备,采用依次设置的间歇下料装置、旋转下料输送装置、间歇旋转下料装置和包装缠绕装置、以及包装控制系统,通过控制器控制工件转运手抓电机和真空发生器动作,促使工件转运真空手抓在工件转运导轨上水平滑动,对待包装工件进行真空吸附夹持并将真空吸附夹持的待包装工件放至工件旋转机构上后用于控制工件旋转机构进行旋转,同时驱动缠绕带抓取机构抓取缠绕带,将缠绕带缠绕于旋转的待包装工件上。本发明提供的自动化包装设备,通过带有开口形状与待包装工件的外型相适配的真空吸口的工件转运真空手抓以真空吸附的方式吸取待包装工件,不会夹伤工件且转运速度快;自动化程度高、提高打包工作效率。
附图说明
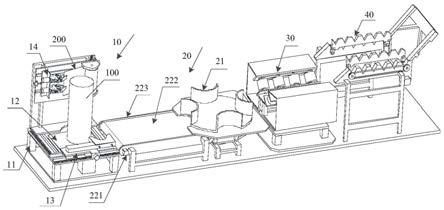
18.图1为本发明提供的自动化包装设备第一实施例第一视图的立体结构示意图;
19.图2为本发明提供的自动化包装设备第一实施例第二视图的立体结构示意图;
20.图3为本发明提供的自动化包装设备第一实施例第三视图的立体结构示意图;
21.图4为图1中所示的包装缠绕装置一实施例第一视图的立体结构示意图;
22.图5为图1中所示的包装缠绕装置一实施例第二视图的立体结构示意图;
23.图6为图1中所示的包装缠绕装置一实施例第三视图的立体结构示意图;
24.图7为图1中所示的包装缠绕装置一实施例第四视图的立体结构示意图;
25.图8为本发明提供的自动化包装设备第二实施例的立体结构示意图;
26.图9为图8中沿a-a向的剖面结构示意图;
27.图10为图8中所示的抓取手抓一实施例的立体结构示意图;
28.图11为图8中所示的间歇下料装置一实施例第一视图的立体结构示意图;
29.图12为图8中所示的间歇下料装置一实施例第二视图的立体结构示意图;
30.图13为本发明提供的自动化包装设备第三实施例的立体结构示意图;
31.图14为图13中所示的旋转下料输送装置一实施例的立体结构示意图;
32.图15为本发明提供的自动化包装设备第四实施例的立体结构示意图;
33.图16为图15中所示的间歇送料机构一实施例的立体结构示意图;
34.图17为图16中所示的间歇送料机构一实施例的内部立体结构示意图。
35.附图标号说明:
36.10、包装缠绕装置;20、间歇旋转下料装置;30、旋转下料输送装置;40、间歇下料装置;11、第一机架;12、工件旋转机构;13、工件转运真空手抓机构;14、缠绕带抓取机构;131、工件转运导轨;132、工件转运连接板;133、工件转运手抓伸出齿条;134、工件转运齿轮;135、工件转运真空手抓;136、工件转运手抓电机;1351、连接块;1352、真空吸取块;13521、吸取部;13522、真空吸口;13523、真空吸附孔;13524、真空接口;51、真空发生器;121、外壳;122、真空吸附盘;123、真空吸附盘旋转大齿轮;124、真空吸附盘驱动齿轮;125、真空吸附盘驱动电机;126、真空腔体;1271、真空分配管道;1272、真空管道接口;128、真空分配固定缸体;129、真空分配旋转体;141、缠绕带平移组件;142、缠绕带升降组件;143、缠绕带抓取组件;1431、拉伸手抓平移连接板;1432、拉伸手爪平移导轨;1433、拉伸手爪安装架;1434、平移丝杠;1435、手爪平移电机;1436、电动推杆;1437、抓取手抓;1438、打包带安装架;14371、电动推杆连接杆;14372、连接杆连接座;14373、第一连杆;14374、第二连杆;14375、第一缠绕带夹持手抓;14376、第二缠绕带夹持手抓;1411、缠绕机构平移导轨;1412、缠绕机构平移电机;1413、缠绕机构平移电机齿轮;1414、缠绕机构平移齿条;1415、连接背板;1421、缠绕机构升降导轨;1422、缠绕机构升降电机;1423、缠绕机构升降电机齿轮;1424、缠绕机构升降齿条;41、第二机架;42、倾斜下料板;43、固定齿形输送板;44、移动齿形输送板;45、摇杆;46、同步带轮;47、驱动电机;48、动力输送轴;31、旋转驱动电机;32、旋转驱动电机安装板;33、旋转驱动齿轮;34、旋转大齿轮;35、支撑立柱;36、物料输送辊子电机;37、物料输送辊子;38、辊子安装板;39、物料下料口;21、间歇送料机构;22、间歇水平输送机构;211、物料移动托板;212、间歇旋转下料连接板;213、物料阻挡仿形板;214、间歇旋转下料驱动减速电机;2151、间歇旋转下料驱动轮轴;2152、间歇旋转下料槽轮拨杆;2153、间歇旋转下料驱动
轮;2154、间歇旋转下料槽轮;2155、间歇旋转下料槽轮轴;2156、间歇旋转下料柜槽轮连接板;221、输送带电机;222、输送带;223、输送带安装板;100、待包装工件;200、缠绕带。
具体实施方式
37.为了更好的理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案做详细的说明。
38.如图1至图7所示,本发明第一实施例提出一种自动化包装设备,包括依次设置的间歇下料装置40、旋转下料输送装置30、间歇旋转下料装置20和包装缠绕装置10、以及包装控制系统,包装缠绕装置10包括第一机架11、工件旋转机构12、工件转运真空手抓机构13和缠绕带抓取机构14,工件转运真空手抓机构13包括工件转运导轨131、工件转运连接板132、工件转运手抓伸出齿条133、工件转运齿轮134、工件转运真空手抓135和工件转运手抓电机136,工件转运导轨131和工件转运手抓伸出齿条133相互平行且沿第一机架11轴向设置,工件转运连接板132设于工件转运导轨131上方且可相对工件转运导轨131滑动,工件转运手抓电机136的主轴穿过工件转运连接板132的侧板后套设于工件转运齿轮134上,工件转运齿轮134与工件转运手抓伸出齿条133相啮合,工件转运真空手抓135安装于工件转运连接板132上,工件转运真空手抓135包括连接块1351及与连接块1351相连接的真空吸取块1352,连接块1351与工件转运连接板132固定连接,真空吸取块1352上设有吸取部13521及与吸取部13521相连接用于吸附待包装工件的真空吸口13522,真空吸口13522的开口形状与待包装工件的外型相适配,真空吸口13522的内壁上设有多个真空吸附孔13523,吸取部13521上对应设有与多个真空吸附孔相通的真空接口13524,包装控制系统包括控制器和真空发生器51,真空发生器51与真空接口13524相接通,控制器分别与工件转运手抓电机136、工件旋转机构12、缠绕带抓取机构14和真空发生器51电连接,用于控制工件转运手抓电机136和真空发生器51动作,促使工件转运真空手抓135在工件转运导轨131上水平滑动,对待包装工件100进行真空吸附夹持并将真空吸附夹持的待包装工件100放至工件旋转机构12上后用于控制工件旋转机构12进行旋转,同时驱动缠绕带抓取机构14抓取缠绕带200,将缠绕带200缠绕于旋转的待包装工件100上。
39.进一步地,请见图1至图12,本实施例提供的自动化包装设备,工件旋转机构12包括外壳121、真空吸附盘122、真空吸附盘旋转大齿轮123、真空吸附盘驱动齿轮124、真空吸附盘驱动电机125、真空腔体126、真空分配管道1271、真空管道接口1272、真空分配固定缸体128和真空分配旋转体129,真空吸附盘驱动电机125的主轴套设于真空吸附盘驱动齿轮124上,真空吸附盘驱动齿轮124与真空吸附盘旋转大齿轮123相啮合,真空吸附盘旋转大齿轮123套设于真空腔体126上,真空腔体126的一端穿过外壳121后与真空分配旋转体129相连接,真空腔体126的另一端与真空分配旋转体129相连接,真空分配固定缸体128套设于真空分配旋转体129的外面,真空管道接口1272通过真空分配管道1271与真空腔体126相接通,控制器与真空吸附盘驱动电机125电连接,用于控制真空吸附盘驱动电机125动作,带动真空吸附盘122旋转,从而让缠绕带缠200绕于旋转的待包装工件100上,不会夹伤工件且转运速度快;自动化程度高、提高打包工作效率。
40.优选地,参见图1至图12,本实施例提供的自动化包装设备,缠绕带抓取机构14包括缠绕带平移组件141、缠绕带升降组件142和缠绕带抓取组件143,缠绕带抓取组件143设
于缠绕带升降组件142上,缠绕带升降组件142安装于缠绕带平移组件141上,缠绕带抓取组件143包括拉伸手抓平移连接板1431、拉伸手爪平移导轨1432、拉伸手爪安装架1433、平移丝杠1434、手爪平移电机1435、电动推杆1436、抓取手抓1437和打包带安装架1438,缠绕带200安装于打包带安装架1438上,拉伸手爪平移导轨1432和打包带安装架1438安装于拉伸手抓平移连接板1431上且拉伸手爪平移导轨1432沿拉伸手抓平移连接板1431轴向设置,拉伸手爪安装架1433设于拉伸手爪平移导轨1432上且可相对拉伸手爪平移导轨1432水平滑动,手爪平移电机1435通过平移丝杠1434与拉伸手爪安装架1433相连接,电动推杆1436穿过拉伸手爪安装架1433后与抓取手抓1437相连接,控制器分别与电动推杆1436和手爪平移电机1435电连接,用于控制手爪平移电机1435动作,促使抓取手抓1437做轴向移动;并控制电动推杆1436动作,驱动抓取手抓1437抓取安装于打包带安装架1438上的缠绕带200。抓取手抓1437包括电动推杆连接杆14371、连接杆连接座14372、第一连杆14373、第二连杆14374、第一缠绕带夹持手抓14375和第二缠绕带夹持手抓14376,第一连杆14373连接于电动推杆连接杆14371与第一缠绕带夹持手抓14375之间,第二连杆14374连接于电动推杆连接杆14371与第二缠绕带夹持手抓14376之间,连接杆连接座14372罩合于电动推杆连接杆14371与第一连杆14373和第二连杆14374的连接处。本实施例提供的自动化包装设备,能够从水平横轴方向、水平纵轴方向和竖直方向上进行三轴移动,体积小巧、占地面积小,操作方便,自动化程度高;抓取手抓1437操作灵活度高、提高工作效率。
41.具体地,请见图1至图12,本实施例提供的自动化包装设备,缠绕带平移组件141包括缠绕机构平移导轨1411、缠绕机构平移电机1412、缠绕机构平移电机齿轮1413、缠绕机构平移齿条1414和连接背板1415,缠绕机构平移导轨1411和缠绕机构平移齿条1414相互平行且沿第一机架11水平方向设置,连接背板1415设于缠绕机构平移导轨1411上且可相对缠绕机构平移导轨1411滑动,缠绕机构平移电机1412的主轴穿过连接背板1415后套设于缠绕机构平移电机齿轮1413上,缠绕机构平移电机齿轮1413与缠绕机构平移齿条1414相啮合,控制器与缠绕机构平移电机1412电连接,用于控制缠绕机构平移电机1412动作,带动缠绕带抓取机构14做水平移动。缠绕带升降组件142包括缠绕机构升降导轨1421、缠绕机构升降电机1422、缠绕机构升降电机齿轮1423和缠绕机构升降齿条1424,缠绕机构升降导轨1421和缠绕机构升降齿条相互平行且沿连接背板1415水平方向设置,拉伸手抓平移连接板1431设于缠绕机构升降导轨1421上且可相对缠绕机构升降导轨1421滑动,缠绕机构升降电机齿轮1423的主轴穿过拉伸手抓平移连接板1431后套设于缠绕机构升降电机齿轮1423上,缠绕机构升降电机齿轮1423与缠绕机构升降齿条1424相啮合,控制器与缠绕机构升降电机1422电连接,用于控制缠绕机构升降电机1422动作,带动缠绕带抓取机构14做升降运动。本实施例提供的自动化包装设备,能够从水平横轴方向、水平纵轴方向和竖直方向上进行三轴移动,体积小巧、占地面积小,操作方便,自动化程度高。
42.进一步地,请见图8至图12,本实施例提供的自动化包装设备,间歇下料装置40包括第二机架41、倾斜下料板42、固定齿形输送板43、移动齿形输送板44、摇杆45、同步带轮46、驱动电机47和动力输送轴48,倾斜下料板42设于第二机架41的端部,两块固定齿形输送板43分别位于第二机架41的两侧,两块移动齿形输送板44位于两块固定齿形输送板43之间,驱动电机47与动力输送轴48相连接,两侧的同步带轮46分别套设于动力输送轴48上,且两侧的同步带轮46通过各自相对应的摇杆45分别与其两侧的移动齿形输送板44相连接,控
制器与驱动电机47电连接,用于控制驱动电机47动作,带动两块移动齿形输送板44做圆周运动,驱动待包装工件100移动至旋转下料输送装置30处。在本实施例中,通过间歇下料装置40将待包装工件100进行间歇下料,自动化程度高,提高打包工作效率。
43.优选地,请见图13和图14,本实施例提供的自动化包装设备,旋转下料输送装置30包括旋转驱动电机31、旋转驱动电机安装板32、旋转驱动齿轮33、旋转大齿轮34、支撑立柱35、物料输送辊子电机36、物料输送辊子37、辊子安装板38和物料下料口39,支撑立柱35设于物料下料口39的下方,两组物料输送辊子37分别围绕于支撑立柱35的两侧上方,旋转驱动电机31的主轴穿过旋转驱动电机安装板32后套设于旋转驱动齿轮33上,旋转大齿轮34与旋转驱动齿轮33相啮合,旋转大齿轮34与支撑立柱35相连接,控制器分别与旋转驱动电机31和物料输送辊子电机36电连接,用于控制旋转驱动电机31动作,带动支撑立柱35支撑的待包装工件进行水平转向;并控制物料输送辊子电机36动作,将水平方向放置的待包装工件100转换向竖直方向放置于间歇旋转下料装置20上。在本实施例中,通过旋转下料输送装置30将横向传输的待包装工件100转换向竖直方向进行输送,自动化程度高,提高打包工作效率。
44.进一步地,请见图15至图17,本实施例提供的自动化包装设备,间歇旋转下料装置20包括依次设置的间歇送料机构21和间歇水平输送机构22,其中,间歇送料机构21包括物料移动托板211、间歇旋转下料连接板212、物料阻挡仿形板213、间歇旋转下料驱动减速电机214、间歇旋转下料驱动轮轴2151、间歇旋转下料槽轮拨杆2152、间歇旋转下料驱动轮2153、间歇旋转下料槽轮2154、间歇旋转下料槽轮轴2155和间歇旋转下料柜槽轮连接板2156,间歇旋转下料驱动减速电机214的主轴穿过间歇旋转下料柜槽轮连接板2156后与间歇旋转下料驱动轮轴2151相连接,间歇旋转下料驱动轮轴2151套设于间歇旋转下料驱动轮2153和间歇旋转下料槽轮拨杆2152上,间歇旋转下料槽轮2154套设于间歇旋转下料槽轮轴2155上且分别与间歇旋转下料驱动轮2153和间歇旋转下料槽轮拨杆2152相配合,间歇旋转下料槽轮轴2155穿过物料移动托板211后与间歇旋转下料连接板212相连接,多个物料阻挡仿形板213沿间歇旋转下料连接板212的周向均匀设置,控制器与间歇旋转下料驱动减速电机214电连接,用于控制间歇旋转下料驱动减速电机214动作,带动间歇旋转下料连接板212做间歇旋转运动。间歇水平输送机构22包括输送带电机221、输送带222、输送带安装板223、输送驱动轮和输送从动轮,输送驱动轮和输送从动轮分别安装于输送带安装板223上,输送带电机221的主轴穿过输送带安装板223后与输送驱动轮相连接,输送带222披覆于输送驱动轮和输送从动轮上,控制器与输送带电机221电连接,用于控制输送带电机221动作,在输送带222的驱动下将待包装工件100进行轴向运输。本实施例提供的自动化包装设备,通过间歇旋转下料装置20将竖直方向放置的待包装工件100进行间歇旋转下料,自动化程度高,提高打包工作效率。
45.如图1至图17所示,本实施例提供的自动化包装设备,其工作原理为:
46.本实施例提供的自动化包装设备,采用间歇下料装置40、旋转下料输送装置30、间歇旋转下料装置20、包装缠绕装置10和包装控制系统,待包装的棒料工件从间歇下料装置40下料后,经过一系列运动,最终由工件转运真空手抓135的吸附夹持,放在真空吸附盘122上,缠绕带200由抓取手抓1437夹持,通过工件旋转机构12的运动,将待包装的棒料工件运动到工作位置,最终完成棒料工件的打包操作。
47.工件转运真空手抓135通过工件转运手抓电机136带动,将工件吸附在工件转运真空手抓135上,然后将工件放置在真空吸附盘122上,真空吸附盘122将工件牢牢的吸附在表面上,通过真空吸附盘驱动电机125带动真空吸附盘驱动齿轮124转动,真空吸附盘122也随着一起转动,真空吸附盘122下方装有真空分配装置,内部为可旋转的轴心,轴心钻分配管道,两个真空分配管道1271通过密封圈密封,互不影响,外部为真空分配固定缸体128,缸体上开设有分配孔,当中心轴心转动时,也不影响真空进入。缠绕带200通过抓取手抓1437抓住,斜向拉扯,通过缠绕带抓取机构14的缠绕机构平移电机1412带动,将缠绕带200送入工件处,缠绕带200会随着工件的旋转带动,进行缠绕,与此同时,缠绕带抓取机构14可进行升降运动,从而完成对工件的螺旋打包,当工件打包完成后,缠绕带抓取机构14复位,抓取手抓1437往回运动,通过尖锐的手抓刺穿打包膜,工件在转动时,由于缠绕带200上有刺穿的空洞,缠绕带200会断裂完成打包,同时抓取手抓1437会夹持住缠绕带200,为下次打包做准备。
48.间歇下料装置40将工件放置在倾斜下料板42位置,物料会因重力向下运动,卡在固定齿形输送板43之间的两个v型槽口间,驱动电机47带动动力输送轴48转动,轴的两侧装有同步带轮46,通过间歇下料短同步带和间歇下料长同步带,带动两侧的摇杆45,摇杆45通过摇杆连接轴与移动齿形输送板44连接,移动齿形输送板44会绕着连接轴做圆周运动。移动齿形输送板会44将卡在固定齿形输送板43槽口间的物料输送到下一个槽口间,如此往复运动,实现对物料的一个间歇下料的动作,物料输送后,沿着固定齿形输送板43的倾斜口滚入到旋转下料输送装置30内。
49.经过间歇下料装置40过来的物料落入到旋转下料输送装置30内,旋转驱动电机31带动旋转驱动齿轮33旋转,进而带动旋转大齿轮34旋转,旋转90
°
,使工件能落入到间歇旋转下料装置20内的位置,物料输送辊子电机36工作,通过旋转下料长皮带和旋转下料短皮带带动皮带轮旋转,进而带动两侧的物料输送辊子37工作,物料输送辊子37表面为特殊材质,可增大辊子和工件间的摩擦力,方便带动工件运动。
50.间歇旋转下料装置20上的工件经过物料输送辊子37输送后竖直的落入物料移动托板211上,间歇旋转下料驱动减速电机214带动间歇旋转下料驱动轮2153旋转,间歇旋转下料驱动轮2153上安装有间歇旋转下料槽轮拨杆2152,间歇旋转下料驱动轮2153每旋转一次,通过间歇旋转下料槽轮拨杆2152带动,间歇旋转下料槽轮2154就旋转一次,间歇旋转下料槽轮轴2155带动间歇旋转下料连接板212转动,间歇旋转下料连接板212的周向上装有物料阻挡仿形板213,防止工件倾覆,当旋转到输送带下料口时,工件落入输送带222上,由输送带222带动工件前进,在本实施例中,间歇送料机构21的间歇旋转下料连接板212上设有四个物料阻挡仿形板213。
51.本实施例公开的自动化包装设备,同现有技术相比,采用依次设置的间歇下料装置、旋转下料输送装置、间歇旋转下料装置和包装缠绕装置、以及包装控制系统,通过控制器控制工件转运手抓电机和真空发生器动作,促使工件转运真空手抓在工件转运导轨上水平滑动,对待包装工件进行真空吸附夹持并将真空吸附夹持的待包装工件放至工件旋转机构上后用于控制工件旋转机构进行旋转,同时驱动缠绕带抓取机构抓取缠绕带,将缠绕带缠绕于旋转的待包装工件上。本实施例提供的自动化包装设备,通过带有开口形状与待包装工件的外型相适配的真空吸口的工件转运真空手抓以真空吸附的方式吸取待包装工件,
不会夹伤工件且转运速度快;自动化程度高、提高打包工作效率。
52.尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1