真空驱动机构及包括真空驱动机构的真空传样设备的制作方法
1.本公开涉及真空领域,尤其涉及一种真空驱动机构及包括真空驱动机构的真空传样设备。
背景技术:
2.真空传样设备被广泛应用于真空、超高真空、表面科学、航空航天以及半导体等领域。真空传样设备一般包括真空腔体、设置在腔体上的驱动机构以及由驱动机构驱动的机械臂机构。传统的驱动机构仅能进行水平方向上的移动,进行升降和自由旋转时往往需要不同的模块之间相互配合完成。但是模块与模块之间的连接必须是真空,因此不同模块之间往往采用法兰连接,造成真空空间增大,相应的内部驱动轴的长度必须加长。而驱动轴的增长会使得其刚性较差,整体移动精度较低。且当设备需要通过烘烤来确保真空环境时,需拆卸大量运动部件,增加繁琐工序,造成人力物力的浪费。
3.另外,目前工业上的传样设备主要包括洁净环境型和真空环境型,这些真空传样设备在半导体生产线发挥着举足轻重的作用。长期以来西方通过限制工业传样设备的出口来控制我国相关半导体产业的发展。传统的真空传样设备主要以直驱电机和磁流体密封为主要技术,虽然能实现高效率、高稳定性和高精度的效果,但是真空度主要在e-7mbar~e-9mbar之间。
4.随着半导体技术的发展、高性能化合物半导体制备技术发展(mbe外延技术)以及先进制程的发展(7nm,3nm,1nm制程),传输环节对真空环境的真空度提出了更高的要求,新的材料(红外外延片等)和器件(半导体激光巴条等)制备需要更好的真空环境,减少过程中的污染,典型的真空度要求在e-10mbar~e-11mbar之间,但传统的磁流体密封技术无法达到这样的真空度。
5.如上,现有真空传样设备的驱动机构中存在诸多问题,例如驱动轴刚性差、移动精度差、使用步骤繁琐等问题。
技术实现要素:
6.在一些实施例中,本公开提供一种真空驱动机构,包括:真空腔;至少一个主轴,设置在所述真空腔内并且能够绕轴向旋转;至少一个磁传动装置,与所述至少一个主轴连接并且能够旋转以带动所述至少一个主轴旋转。
7.在一些实施例中,本公开提供一种真空传样设备,包括:根据本公开实施例的真空驱动机构;以及机械臂机构,与驱动机构连接并且用于传送样品。
附图说明
8.为了更清楚地说明本公开实施例的技术方案,下面将对本公开的附图作简单地介绍。可以理解,这些附图仅仅是示例性的,并不构成对本公开的实施例的任何限制。
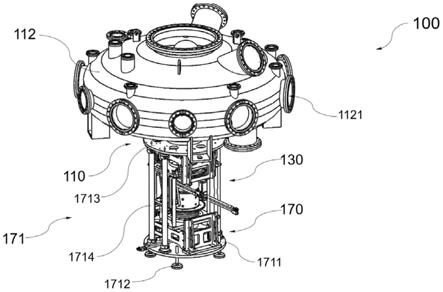
9.图1示出根据本公开一些实施例的真空驱动机构的结构示意图;
10.图2示出根据本公开一些实施例的真空驱动机构的部分结构示意图;
11.图3示出根据本公开一些实施例的磁传动装置的侧视结构示意图;
12.图4示出根据本公开一些实施例的磁传动装置的a-a剖面示意图;
13.图5示出根据本公开一些实施例的升降装置的结构示意图;
14.图6示出根据本公开一些实施例的升降装置的俯视图;
15.图7示出根据本公开另一些实施例的磁传动装置的结构示意图;
16.图8示出根据本公开另一些实施例的真空传样设备的结构示意图。
17.在上述附图中,各附图标记分别表示:
18.100、700真空驱动机构
19.110真空腔
20.111真空腔道
21.112真空腔室
22.1121窗口
23.113波纹管
24.114密封法兰
25.120、720主轴
26.120a第一主轴
27.120b第二主轴
28.120a-1轴体
29.120a-2凸出部
30.120a-3第一角接触轴承
31.120b-1第二角接触轴承
32.120b-2第三角接触轴承
33.130、730磁传动装置
34.130a第一磁传动装置
35.130b第二磁传动装置
36.131主轴磁组件
37.131a第一主轴磁组件
38.131b第二主轴磁组件
39.132驱动磁组件
40.132a第一驱动磁组件
41.132b第二驱动磁组件
42.140a、140b驱动装置
43.150a、150b联轴器
44.151a、151b传动轴
45.152a、152b传动轴承
46.160a、160b驱动齿轮组
47.161a、161b主动齿轮
48.162a、162b从动齿轮
49.170升降装置
50.171、771框架
51.1711、7711托板
52.1712底脚
53.1713、7713顶板
54.1714、7714支撑柱
55.172滑动组件
56.1721a、1721b第一滑轨
57.1722a、1722b第二滑轨
58.1723a、1723b第一滑动件
59.1724a、1724b第二滑动件
60.1725升降驱动装置
61.173丝杆组件
62.1731第一丝杆
63.1732第二丝杆
64.1733第一滑块
65.176蜗轮蜗杆组件
66.1761a、1761b涡轮
67.1762a、1762b蜗杆
68.限位轴承
69.恒力弹簧
70.1000真空传样设备
71.200机械臂机构
72.210机械臂
73.211主臂、211a第一主臂、211b第二主臂
74.212辅臂、212a第一辅臂、212b第二辅臂
75.213传样件
76.214a第一传动件、214b第二传动件
具体实施方式
77.下面将结合附图对本公开一些实施例进行描述。显然,所描述的实施例仅仅是本公开示例性实施例,而不是全部的实施例。
78.在本公开的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”、“顶”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本公开和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本公开的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。在本公开的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“连接”、“相连”、“耦合”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接;可以是机械连接,也可以是电连接;可以
是直接连接,也可以通过中间媒介间接连接;可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本公开中的具体含义。
79.图1示出根据本公开一些实施例的真空驱动机构100的结构示意图。图2示出根据本公开一些实施例的真空驱动机构100的部分结构示意图。
80.如图1和图2所示,真空驱动机构100包括:真空腔110、至少一个主轴120和至少一个磁传动装置130。至少一个主轴120可以设置在真空腔110内并且能够绕轴向旋转。至少一个磁传动装置130与至少一个主轴120连接,并且能够旋转以带动至少一个主轴120旋转。
81.在本公开中,真空腔110为内部为真空环境的腔体。主轴120整体处于真空环境内,且主轴120在真空腔110内的运动不影响真空腔110的真空度,能够使得传样过程中不破真空,节省整体生产或实验的时间,降低成本。
82.图3示出根据本公开一些实施例的磁传动装置130的结构示意图。图4示出根据本公开一些实施例的磁传动装置130的a-a剖面示意图。
83.如图3和图4所示,在本公开的一些实施例中,真空腔110可以包括真空腔道111。至少一个主轴120(例如主轴120a、120b)可以设置在真空腔道111内并且能够绕轴向旋转。磁传动装置130可以包括:设置在主轴120(例如主轴120a、120b)上的主轴磁组件131(例如主轴磁组件131a、131b)和设置在真空腔110(例如真空腔道111)外的磁驱动组件132(例如主轴磁组件132a、132b)。磁驱动组件132与主轴磁组件131形成磁耦合,并且能够旋转,以带动主轴磁组件131和主轴120旋转。
84.在本公开的一些实施例中,主轴磁组件131包括沿周向、固定设置在主轴120上的至少一个主轴磁体。例如,主轴磁体可以包括间隔设置在主轴周向上的多个磁条或磁块。磁驱动组件132包括沿周向、转动设置在真空腔110外侧的至少一个驱动磁体。例如,驱动磁体可以包括间隔沿真空腔110外侧设置的多个磁条或磁块,可以相对于真空腔110的外壁旋转(例如通过轴承与真空腔110的外壁连接)并且与主轴磁体形成磁耦合。
85.本公开的驱动磁组件132设置在真空腔110(例如真空腔道111)外,大气环境与真空环境采用磁耦合驱动方式,能够保证真空腔110内维持超高真空环境。
86.本领域技术人员可以理解虽然本公开图3和图4中示出的主轴磁组件131沿主轴120周向设置,驱动磁组件132沿真空腔110外侧周向设置,但是主轴磁组件131也可以沿主轴120轴向设置,驱动磁组件132可以沿真空腔110轴向设置。类似地,本领域技术人员可以理解,主轴磁组件131和驱动磁组件132采取能够磁耦合的设置方式即可。
87.如图3和图4所示,在本公开的一些实施例中,真空驱动机构100还可以包括驱动装置,例如驱动装置140a、140b。驱动装置140a、140b设置在真空腔110外,用于驱动驱动磁组件132旋转以带动主轴磁组件131和主轴120旋转。
88.在本公开的一些实施例中,驱动装置140a、140b包括谐波减速步进电机。
89.在本公开的一些实施例中,真空驱动机构100还包括:联轴器(例如联轴器150a、150b)以及驱动齿轮组(例如驱动齿轮组160a、160b)。联轴器150a、150b可以分别与驱动装置140a、140b连接,传动轴151a、151b通过传动轴承152a、152b与驱动齿轮组160a、160b连接在一起。驱动齿轮组160a、160b可以分别包括主动齿轮161a、161b和从动齿轮162a、162b,主动齿轮161a、161b与传动轴151a、151b连接,在驱动装置140a、140b连接的传动轴151a、151b的驱动下旋转。从动齿轮162a、162b与驱动磁组件132连接且与主动齿轮161a、161b相啮合,
能够在主动齿轮161a、161b的带动下旋转,从而带动驱动磁组件132旋转。
90.在本公开的一些实施例中,驱动齿轮组160包括零背隙齿轮组。
91.本公开使用零背隙齿轮组进行驱动,零背隙齿轮组耐高温,在烘烤中免于拆除,减少操作步骤,提高生产或实验效率。
92.本领域技术人员可以理解,虽然本公开采用联轴器150和驱动齿轮组160带动驱动磁组件132旋转,但是驱动装置140也可以通过同步带轮组与驱动磁组件132相连,从而带动驱动磁组件132旋转。联轴器与驱动装置连接,同步带轮组包括主动轮、从动轮、连接带,主动轮与联轴器连接,在驱动装置的驱动下旋转,从动轮安装在驱动磁组件上且通过连接带与主动轮相配合,能够在主动轮的带动下旋转,从而带动驱动磁组件旋转。例如,主动轮可以通过传动杆与联轴器连接,从动轮可以套设在驱动磁组件上。
93.如图4所示,在本公开的一些实施例中,至少一个主轴120包括第一主轴120a和与第一主轴同轴设置的第二主轴120b。至少一个磁传动装置130包括第一磁传动装置和第二磁传动装置。第一磁传动装置与第一主轴120a连接并且能够旋转以带动第一主轴120a旋转。第二磁传动装置与第二主轴120b连接并且能够旋转以带动第二主轴120b旋转。
94.本领域技术人员可以理解,虽然图4中示出的主轴120包括第一主轴120a和第二主轴120b,但主轴120也可以仅包括第一主轴120a或第二主轴120b,或者两个以上的主轴。类似地,本领域技术人员可以理解,虽然图4中示出的磁传动装置130包括第一磁传动装置和第二磁传动装置,但磁传动装置130也可以仅包括第一磁传动装置或第二磁传动装置,或者两个以上的主轴。
95.在本公开的一些实施例中,第一主轴120a包括轴体120a-1以及轴体120a-1下方与轴体120a-1同轴设置的凸出部120a-2。第二主轴120b套设在第一主轴120a的轴体120a-1外。
96.在本公开的一些实施例中,第一磁传动装置包括套设在凸出部120a-2外的第一主轴磁组件131a。第二磁传动装置包括套设在第二主轴120b外的第二主轴磁组件131b。在一些实施例中,凸出部120a-2的外径与第二主轴120b的外径相同,且第一主轴磁组件131a与第二主轴磁组件131b的内径相同,外径也可以相同。这样,可以使得磁传动装置130的安装更加简单,操作更加稳定、高效。
97.在本公开的一些实施例中,磁传动装置130还包括:第一驱动磁组件132a和第二驱动磁组件132b。第一驱动磁组件132a设置在真空腔110(例如真空腔道111)外,与第一主轴磁组件131a形成磁耦合,并且能够旋转,以带动第一主轴磁组件131a和第一主轴120a旋转。第二驱动磁组件132b设置在所述真空腔110外,与第二主轴磁组件131b形成磁耦合,并且能够旋转,以带动第二主轴磁组件131b和第二主轴120b旋转。
98.本公开中第二主轴120b套设在第一主轴120a的轴体120a-1外,第一驱动磁组件132a和第二驱动磁组件132b设置在真空腔110外,能够分别驱动第一主轴120a和第二主轴120b的转动,使两个自由度的旋转集成在一体上,压缩驱动空间,使驱动结构更加紧凑,大幅度提高驱动精度。
99.图5示出根据本公开一些实施例的升降装置170的结构示意图。图6示出根据本公开一些实施例的升降装置170的俯视图。
100.如图5和图6所示,本公开的真空驱动机构100还包括升降装置170。升降装置170包
括:框架171和滑动组件172。滑动组件172包括第一滑轨1721a、1721b、第二滑轨1722a、1722b、第一滑动件1723a、1723b、第二滑动件1724a、1724b。
101.框架171包括托板1711、底脚1712、顶板1713以及支撑柱1714。托板1711和顶板1713通过支撑柱1714固定在一起,底脚1712设置在托板1711的下表面上,用于支撑托板1711上的结构。顶板1713的中心处开设有连接孔,安装法兰114设置在连接孔上且位于顶板1713的上表面上,主轴120穿设在连接孔内。
102.本领域技术人员可以理解,虽然图1和图2中示出的框架171包括四个底脚1712,但是底脚1712的数量也可以为三个或者大于四个。类似地,本领域技术人员可以理解,虽然图1和图2中示出的框架171包括四个支撑柱1714,但是支撑柱1714的数量也可以为三个或大于四个。
103.第一滑轨1721a、1722b和第二滑轨1722a、1722b相对于真空腔110对称地固定设置在框架上171上,第一滑动件1723a、1723b和第二滑动件1724a、1724b设置在真空腔110两侧,分别与第一滑轨1721a、1721b和第二滑轨1722a、1722b配合以使得真空腔110能够升降。
104.第一滑轨1721a和第一滑轨1721b对称设置,第二滑轨1722a和第二滑轨1722b对称设置。本领域技术人员可以理解,滑轨的数量可以不限于2个、4个,可以按照需要安装适当数量的滑轨和滑动件。
105.在本公开的一些实施例中,滑动组件172还包括:升降驱动装置1725,用于驱动第一滑动件1723和第二滑动件1724分别在第一滑轨1721和第二滑轨1722上滑动。
106.在本公开的一些实施例中,升降装置还包括丝杆组件173。丝杆组件173包括:第一丝杆1731、第二丝杆1732(图中未示出)、第一滑块(例如,螺母)1733、第二滑块(图中未示出)。
107.第一丝杆1731和第二丝杆1732分别与第一滑轨1721和第二滑轨1722平行设置并且与升降驱动装置1725连接。第一滑块1733和第二滑块分别与第一丝杆1731和第二丝杆1732相配合并且与第一滑动件1723和第二滑动件1724固定连接。例如,第一滑块1733和第二滑块可以固定连接到真空腔110的底座上,而且第一滑动件1723和第二滑动件1724也固定连接到真空腔110的底座上,从而使得第一滑块1733和第二滑块与第一滑动件1723和第二滑动件1724固定连接,如图5所示。再例如,第一滑块1733和第二滑块可以直接固定连接到第一滑动件1723和第二滑动件1724,或者与第一滑动件1723和第二滑动件1724一体成型。
108.升降驱动装置1725可以用于驱动第一丝杆1731和第二丝杆1732旋转,使第一滑块1733和第二滑块沿第一丝杆1731和第二丝杆1732轴向运动,驱动第一滑动件1723a、1723b和第二滑动件1724a、1724b分别在所述第一滑轨1721a、1721b和第二滑轨1722a、1722b上滑动。
109.升降驱动装置1725包括步进电机,步进电机可以通过十字滑块联轴器(图中未示出)和t型齿轮箱(图中未示出)与第一丝杆1731和第二丝杆1732连接并驱动第一丝杆1731和第二丝杆1732转动。
110.升降装置170可以整体成对称结构,驱动磁传动装置130和主轴120升降时使其受力均匀对称,不易产生倾覆力矩,使得升降更加平稳。
111.在本公开的一些实施例中,升降装置170还包括蜗轮蜗杆组件176。蜗轮蜗杆组件
176可以用于传动以及动力失效的情况下自锁。
112.176蜗轮蜗杆组件包括涡轮1761a、1761b和蜗杆1762a、1762b。涡轮1761a、1761b分别与第一丝杆1731和第二丝杆1732啮合,蜗杆1762a、1762b与涡轮1761a、1761b相啮合。当升降驱动装置1725驱动蜗杆1762a、1762b与涡轮1761a、1761b旋转时,带动第一丝杆1731和第二丝杆1732旋转使第一滑块1733和第二滑块做上升运动或下降运动;当升降驱动装置1725突然停转(例如,由于故障),磁传动装置130和真空腔110在重力作用下有下落趋势时,蜗杆1762a、1762b与涡轮1761a、1761b能够锁紧,防止磁传动装置130和真空腔110下落。
113.在本公开的一些实施例中,升降装置170还包括限位轴承177,安装在主轴120上,使主轴120仅能沿其轴向做升降运动。
114.在本公开的一些实施例中,升降装置170还包括恒力弹簧178。恒力弹簧178与真空腔110和框架171连接并且用于至少部分抵消重力负载。
115.如图1、图4所示,在本公开的一些实施例中,真空腔110包括真空腔道111和与真空腔道111连通的真空腔室112,并且至少一个主轴120可旋转地设置在真空腔道111的内壁上。
116.例如,如图4所示,第一主轴120a的凸出部120a-2通过第一角接触轴承120a-3转动连接在真空腔道111的下部,使得第一主轴120a仅能绕其轴线转动。第二主轴120b通过第二角接触轴承120b-1与第一主轴120a的上部转动连接,且通过第三角接触轴承120b-2与真空腔道111的内壁上部转动连接,使得第二主轴120b能够绕其轴线与第一主轴120a相对转动。
117.本领域技术人员可以理解,虽然图4中示出的凸出部120a-2与真空腔道111、第二主轴120b与第一主轴120a、第二主轴120b与真空腔道111通过角接触轴承转动连接,但是凸出部120a-2与真空腔道111、第二主轴120b与第一主轴120a、第二主轴120b与真空腔道111也可以通过交叉滚子轴承转动连接。
118.在本公开的一些实施例中,真空腔110还包括波纹管113。波纹管113可以用于连接真空腔道111和真空腔室112。
119.例如,如图4所示,波纹管113一端与真空腔道111的法兰密封连接,另一端通过密封法兰114与真空腔室112密封连接,使得磁传动装置130在升降运动的过程中真空腔110(例如,真空腔道111和真空腔室112)始终保持密封状态。
120.图7示出根据本公开另一些实施例的磁传动装置700的结构示意图。
121.如图7所示,在本公开的另一些实施例中,实施例的磁传动装置700包括主轴720和磁传动装置730。磁驱动装置730和主轴720设置在框架771的托板7711上,托板7711与顶板7713之间通过支撑杆7714连接。
122.磁传动装置700省略了升降装置,其他结构与磁传动装置100相似,在此不再赘述。
123.图8示出根据本公开另一些实施例的真空传样设备1000的结构示意图。
124.为使描述更加清楚,图8中省略了真空驱动机构100的真空腔室112。如图8所示,真空传样设备1000可以包括:真空驱动机构100和机械臂机构200。机械臂机构200可以用于与真空驱动机构100连接并且用于传送样品。
125.在本公开的一些实施例中,机械臂机构200包括至少一个机械臂210,机械臂210包括主臂211、辅臂212以及传样件213。主臂211一端安装在主轴120上且能以主轴120为中心转动。辅臂212呈弧状,一端与主臂120同轴转动连接,另一端与传样件213固定在一起。主臂
211在主轴120的驱动下移动,通过辅臂212带动传样件213。例如,传样件213可以通过真空腔室112的窗口1121伸出,以便传样。
126.在本公开的一些实施例中,主臂211包括第一主臂211a和第二主臂211b,辅臂212包括第一辅臂212a和第二辅臂212b。机械臂机构200还包括分别设置在第一辅臂212a和第二辅臂212b上且相互耦合的第一传动件214a和第二传动件214b。
127.第一主臂211a与第一主轴120a连接,以被第一主轴120a驱动,第二主臂211b与第二主轴120b连接,以被第二主轴120b驱动。
128.在本公开的一些实施例中,第一传动件214a和第二传动件214b的传动方式包括以下至少一种:齿轮传动、摩擦轮传动以及拉带传动。通过设置第一传动件214a和第二传动件214b,可以第一辅臂212a和第二辅臂212b之间的运动同步性更好,从而使机械臂机构200的传样更加平稳。
129.根据本公开一些实施例的真空驱动机构及包括真空驱动机构的真空传样设备能够带来有益的技术效果。例如,本公开一些实施例的真空驱动机构能够解决常规技术中驱动轴刚性差、移动精度差、使用步骤繁琐等问题,可以实现体积减小,驱动轴长度缩短,压缩驱动空间,使驱动结构更加紧凑,驱动精度大幅提高,操作简单,维护便捷。例如,本公开一些实施例的真空传样设备能够实现机械臂刚度和抗倾覆力矩增加,传样稳定,移动精度高,且能够在超高真空环境(例如真空度达e-12mbar)中实现高精度传样,减少样品污染情况。
130.应当理解,本公开所描述的实施例仅仅是示例性实施例,并不构成对本公开的限制。在本公开的精神和原则之内,所作的任何修改、等同替换、改进等,均应落在本公开的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1