一种垃圾智能分类装置及方法
第二舵机通过舵机支架安装在支撑轴上,第二舵机的输出段设置主动齿轮,主动齿轮与从动 齿轮咬合,从动齿轮上端安装投料板;从动齿轮的下端安装转轴,转轴的下部套装在轴承的 内圈内,轴承的外圈设置在支撑轴的上端,投料板的滑面上设置槽口,用于垃圾通过投料板 滑入垃圾桶内,第二舵机与控制器电连接。
12.一种垃圾智能分类装置,还包括机架,机架的底部安装所述底盘,机架的外壁上开设有 对应所述上平台的投料口。
13.所述底盘中心位置设置支撑轴,垃圾桶围绕支撑轴安装在底盘上。
14.所述安装架上设置托架,托架上安装显示器,显示器在机架的一侧壁上露出,显示器与 所述控制器电连接。
15.所述控制器为树莓派,设置在机架的内部。
16.利用上述垃圾智能分类装置进行垃圾智能分类的方法,包括以下步骤:
17.步骤1,将垃圾通过投料口投入到上平台之上,触动上平台上设置的传感器;
18.步骤2,控制器根据获得的传感器发出的信号,控制摄像头对上平台上的垃圾进行拍照;
19.步骤3,摄像头将拍照结果传输回控制器,由控制器得到分类结果,控制器根据分类结 果对舵机发出对应动作的指令;
20.步骤4,位于投料滑板下方位置的第二舵机控制投料滑板的槽口转向对应垃圾桶的方向, 再由位于上平台的第一舵机驱动推板将垃圾推入投料滑板的槽口之中并顺利掉进对应的垃圾 桶中;
21.步骤5,控制器将垃圾分类结果传输给显示器,在显示器播放垃圾分类宣传视频的同时 显示垃圾分类结果。
22.本发明具有以下有益效果:
23.本发明的垃圾智能分类装置相较于现有技术的装置,没有使用复杂的机械手臂或者数量 庞大的舵机与传感器,只用设置了两组舵机,生产成本大幅降低,同时,从垃圾地投入到分 类完成仅仅需要3-4秒钟的时间,提高了垃圾分类的效率,在使用上极大的方便垃圾分类这 一规定的执行和推进。
24.通过设置显示器,可以在无工作的时候播放垃圾分类的宣传动画,起到宣传的作用,能 够减少垃圾分类政策推广之中的花费,显示分类的结果,促进群众掌握垃圾分类的正确知识。 而且将垃圾按照标准进行合理的分类,可以有效地提高垃圾这种“放错位置的资源”的回收 利用,对社会环境,资源和社会生活都会非常大的经济效益和社会效益。
附图说明
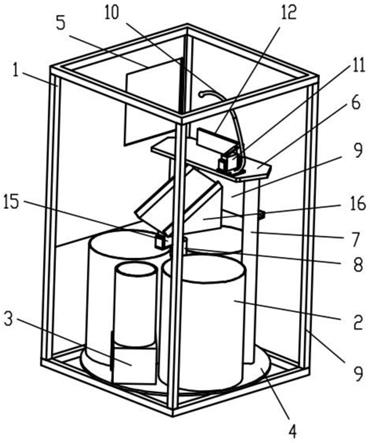
25.图1是本发明提供的垃圾智能分类装置左等轴侧视图;
26.图2是本发明提供的垃圾智能分类装置右等轴侧视图;
27.图3是本发明提供的垃圾智能分类装置的垃圾推动装置结构图;
28.图4是本发明提供的垃圾智能分类装置的旋转装置结构图;
29.图5是本发明提供的垃圾智能分类装置的垃圾智能分类的方法流程图。
30.其中,1-机架,2-垃圾桶,3-树莓派,4-底盘,5-投料口,6-上平台,7-安装架,8-支撑 轴,9-托架,10-摄像头,11-第一舵机,12-推板,13-固定板,14-连接杆,15-第二舵机,
16
‑ꢀ
投料板,17-主动齿轮,18-从动齿轮,19-舵机支架,20-转轴,21-轴承,22-槽口。
具体实施方式
31.为了解决现有技术存在的问题,如图1至图4所示,本发明提供了一种垃圾智能分类装 置,包括底盘4、垃圾桶2、垃圾分类执行装置、上平台6和控制器,底盘4上设有垃圾桶2, 垃圾桶2的上部设有的垃圾分类执行装置和上平台6,上平台6通过安装架7安装在底盘4 上;垃圾分类执行装置包括旋转装置、垃圾推动装置和垃圾图像采集装置;旋转装置设置在 上平台6的下部,旋转装置通过支撑轴8安装在底盘4上,垃圾推动装置和垃圾图像采集装 置安装在上平台6上;旋转装置、垃圾推动装置和垃圾图像采集装置电连接控制器。垃圾桶 2包括可回收垃圾桶2、厨余垃圾桶2、其他垃圾桶2和有害垃圾桶2,负责暂时储存分类后 的垃圾。
32.还包括机架1,机架1的底部安装底盘4,机架1的外壁上开设有对应上平台6的投料口 5。底盘4中心位置设置支撑轴8,垃圾桶2围绕支撑轴8安装在底盘4上。安装架7上设置 托架9,托架9上安装显示器,用于显示垃圾分类的结果和播放垃圾分类宣传视频;显示器 在机架1的一侧壁上露出,显示器与控制器电连接。
33.具体地,控制器为树莓派3,设置在机架1的内部。
34.垃圾图像采集装置包括传感器和摄像头10,传感器、摄像头10与控制器电连接,当垃 圾从投料口5投入到上平台6之后,将触发传感器并发出电信号传输给控制器3。当控制器3 收到电信号之后将驱动摄像头10对从投料口5投入在上平台6上的垃圾进行拍照,拍摄的照 片传输回控制器3。
35.垃圾推动装置包括第一舵机11、推板12、固定板13、连接杆14,推板12设置在上平台 6的上端面,推板12与连接杆14一端连接,连接杆14的另一端与第一舵机11连接,第一 舵机11通过固定板13安装在上平台6上,第一舵机11带动推板12在上平台6的上端面上 运动,第一舵机11与控制器电连接。控制器3控制第一舵机11运动,进行分类时启动第一 舵机11,第一舵机11通过连接杆14带动推板12运动,将垃圾从上平台6推出,掉入对应 的垃圾桶2中。
36.旋转装置包括第二舵机15、投料板16、主动齿轮17、从动齿轮18、舵机支架19、转轴 20、轴承21;第二舵机15通过舵机支架19安装在支撑轴8上,第二舵机15的输出段设置 主动齿轮17,主动齿轮17与从动齿轮18咬合,从动齿轮18上端安装投料板16;从动齿轮 18的下端安装转轴20,转轴20的下部套装在轴承21的内圈内,轴承21的外圈设置在支撑 轴8的上端,投料板16的滑面上设置槽口22,用于垃圾通过投料板16滑入垃圾桶2内,第 二舵机15与控制器电连接。第二舵机15工作时通过主动齿轮17和从动齿轮18的咬合配合, 带动投料板16围绕支撑轴8旋转。控制器3根据垃圾分类的结果控制第二舵机15工作,通 过主动齿轮17带动从动齿轮18,从而使得投料板16同步旋转,投料板16槽口22位置到达 对应垃圾桶2的位置后,控制器3控制第一舵机11工作,第一舵机11通过连接杆14带动推 板12运动,推板12将垃圾推出上平台6,通过投料板16,落入对应的垃圾桶2内,进而实 现改变垃圾掉落的方向。
37.如图1至图5所示,上述垃圾智能分类装置进行垃圾智能分类的方法,以控制器为树莓 派为例,包括以下步骤:
38.步骤1,将垃圾通过投料口5投入到上平台6之上,触动上平台6上设置的传感器;
39.步骤2,树莓派3根据获得的传感器发出的信号,控制摄像头10对上平台6上的垃圾进 行拍照;
40.步骤3,摄像头10将拍照结果传输回树莓派3,由树莓派3得到分类结果,树莓派3根 据分类结果对舵机发出对应动作的指令;
41.步骤4,位于投料滑板下方位置的第二舵机15控制投料滑板的槽口22转向对应垃圾桶2 的方向,再由位于上平台6的第一舵机11驱动推板12将垃圾推入投料滑板的槽口22之中并 顺利掉进对应的垃圾桶2中;
42.步骤5,树莓派3将垃圾分类结果传输给显示器,在显示器播放垃圾分类宣传视频的同 时显示垃圾分类结果。
43.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之 内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1