一种农业作物的作业系统的制作方法
1.本发明属于农业机械领域,涉及一种农业作物的作业系统。
背景技术:
2.农业目前多在地势平坦、现代大棚、现代养殖场地势平坦区域应用机器人,但高标准农田、山区丘陵地区还基于于人畜力解决灌溉、施肥、搬运等作业问题,水电路基建设施不完善的地区,机械无法进入;另外现有的机器人多用于浇水、喷药以及施肥等简单的操作,自动化和智能化程度较低,本发明有效地解决了这种问题。
技术实现要素:
3.本发明为了克服现有技术的不足,提供一种农业作物的作业系统。
4.为了实现上述目的,本发明采用以下技术方案:一种农业作物的作业系统,其特征在于:包括机器人、钢索装置、驱动装置、功能模块以及若干基站,钢索装置连接两组基站,钢索装置承托机器人,驱动装置控制机器人沿钢索装置移动,功能模块可拆卸安装在机器人,功能模块包括监测模块或/和装载模块或/和水肥模块或/和杀菌模块或/和供电模块,机器人包括机架和主机装置,主机装置包括主机箱,主机箱包括控制模块、动力模块和巡检组件,控制模块控制动力模块、巡检组件、驱动装置和功能模块的运行。
5.进一步的;所述机器人包括承托装置,主机装置和承托装置安装在机架上,控制模块控制动力模块、巡检组件以及机器人的运行,机架包括机架横杆和机架直杆,机架横杆设置有两组,两组机架横杆平行设置,且通过机架横短杆固设连接,机架直杆与机架横杆通过机架连接板固设连接,且两者呈相互垂直状态,且机架直杆的长度方向与机器人的移动方向一致,机架直杆与机架横杆连接有机架加强板,机架上固设有天线组件,天线组件设置有两组,且两组天线组件安装在机架直杆的两端,天线组件包括天线和天线安装块,天线安装块固设在机架直杆上,天线安装在天线安装块上,通过天线进行信息传输和交互。
6.进一步的;所述控制模块包括通信接口,控制模块通过通信接口带有的无线或有线通讯模块,与通信设备进行信息交互,对机器人进行远程操控,主机箱还搭载有语音作业组件,通过语音作业组件对机器人进行语音操控,通信设备包括手机app或/和中央控制室或/和vr眼镜,通信接口接收通信设备的控制指令和语音作业组件识别的语音数据,通信接口包括主机箱上的各种有线或无线通信接口,控制模块通过动力模块控制机器人沿轨道来回运动;巡检组件包括接收模块、存储模块和操作模块,存储模块内配置有多种种植作物以及养殖生物的信息,操作模块输入设定的作物信息及种植或养殖信息和操作,接收模块接收监测模块采集的作物实时数据,监测模块对作物区进行小时网络视频监控,接收模块将作物实时数据与存储模块的作物数据对比,进行分析诊断处理,判定作物的实时状态,根据判断的结果,操作模块作出相应的作业;通过巡检组件进行机器人的巡检模式。
7.进一步的;所述供电模块对机器人供电,供电模块采用蓄电池或充电控制模块,供电模块包括光伏板和光伏安装板,供电模块安装在机架的侧面,光伏安装板安装在机架,光
伏板安装在光伏安装板,光伏安装板包括与机架安装的机架安装部以及与光伏板安装的光伏安装部,机架安装部水平设置,光伏安装部与机架安装部呈倾斜设置。
8.进一步的;所述装载模块可拆卸安装在机架上,装载模块用于重载运输,装载模块包括两组装载架,装载架上固设有装载构件,装载构件用于挂载功能配件,功能配件包括铺膜模块或/和播种模块或/和打孔模块或/和投料模块或/和浇水模块或/和收割模块,功能配件通过装载模块搭载在机架的下方,两组所述装载架对称安装在机架的机架上,两组装载架的分布方向与机器人的移动方向垂直,装载架的下方固设有装载固定板,两组装载构件固设在装载固定板的两端,装载构件在竖直方向的横截面设置为c型,c型的开口方向水平且朝向机架,装载构件的c型设计便于对功能配件进行挂设或搭载。
9.进一步的;所述水肥模块安装在机架,水肥模块包括水肥管和水肥组件,主机装置控制水肥模块向作物区喷淋水肥,水肥组件包括水肥伸缩组件、水肥架和水肥桶,水肥伸缩组件控制水肥桶的位置,水肥桶安装在水肥架上,水肥桶与水肥管连通,水肥伸缩组件包括伸缩架和液压杆,液压杆沿竖直方向与伸缩架固设连接,液压杆伸缩后控制伸缩架在竖直方向的伸缩,水肥伸缩组件的上方固设有水肥连接组件,水肥连接组件与机架固设连接。
10.进一步的;所述杀菌模块包括气体杀菌装置,主机装置控制气体杀菌装置运行,气体杀菌装置包括涡扇,涡扇的进口端尺寸大于出口出口端尺寸,沿空气流动方向涡扇的尺寸逐渐减少,涡扇包括涡壳和涡架,涡架构成涡扇的整体框架,涡壳安装在涡架的外表面,将涡架以及涡架内安装的设备整体包裹在内部,并形成空气的流通通道;涡壳内部设置有隔音棉,外部设置有高强度保温隔热防火棉,涡扇内还设置有风机,风机安装在涡扇的进口端,风机用于涡扇内部形成负压环境。
11.进一步的;所述杀菌模块包括液体杀菌装置,液体杀菌装置包括杀菌液和雾喷机构,主机装置控制液体杀菌装置运行,杀菌液由稀释液和杀菌原液按比例混合而成,雾喷机构包括雾喷管和雾喷头,杀菌液由雾喷管或雾喷头向外雾喷杀菌液消杀灭菌,液体杀菌装置还包括杀菌伸缩组件、杀菌架、稀释桶、杀菌桶和出液管,出液管安装在涡扇的出口端,出液管一端通过管道分别与稀释桶和杀菌桶连通,管道内设置有比例泵,出液管的另一端与雾喷头连通,杀菌桶内装有杀菌原液,稀释桶内装有稀释液,稀释对杀菌原液进行稀释,比例泵调节稀释桶以及杀菌桶的液体输送比例,稀释桶的稀释液以及杀菌桶的杀菌原液通过设定的比例直接输送至出液管,并通过雾喷头或雾喷管向外雾喷调配后的杀菌液。
12.进一步的;所述基站至少包括两组,两组基站设置为一个单元,一个单元的两组基站分布在作物区的两边,且位于作物区两边的两组基站一一对应,一个单元与一组机器人对应,一个单元设置一组钢索装置;一个单元的两组基站之间设置停靠基站,基站包括基站立柱和基站横梁,基站立柱和基站横梁由若干管道构成,基站横梁固设在位于上侧的基站立柱上,基站横梁和基站立柱形成t字型结构,基站横梁与基站立柱之间设置有基站悬梁,基站立柱底部固设有基站固定座,基站固定座安装在基站底座,基站还包括基站斜拉机构,基站斜拉机构包括两组基站斜拉基座,每组基站斜拉基座上固设有基站斜拉绳固定座,基站斜拉绳固定座与基站横梁间固设有基站斜拉绳,基站斜拉基座分别位于基站的两侧,基站以及两组基站斜拉基座呈三角分布,一个单元内的两组基站通过钢索装置连接。
13.进一步的;所述钢索装置包括主钢索、副钢索和钢索固定机构,主钢索位于副钢索的上方,基站上固设有钢索承托架,钢索承托架上固设有主钢索套,主钢索套设在主钢索套
内,基站上固设有副钢索套,副钢索套设在副钢索套内,主钢索和副钢索固设在钢索固定机构,钢索固定机构包括钢索斜拉基座,钢索斜拉基座上固设有钢索斜拉绳固定座,主钢索和副钢索分别与钢索斜拉绳固定座固设,主钢索设置两组,副钢索设置两组,两组主钢索的间距小于以及两组副钢索的间距,形成类梯形结构,且主钢索以及副钢索分别位于梯形的四个角上,承托装置与主钢索相抵。
14.综上所述,本发明的有益之处在于:
15.本发明的有益之处在于:本发明通过分布式插地作业基站,将人工智能技术、绿色农业技术、机械技术、电器技术综合应用在对劳动力要求极高的农业基地,达到解放生产力,提升生产效益的目标;本发明实现网络化、智能化的农业技术发展,实现了植物种植过程的全程记录和全程辅助指导,在可以提高农产品产值的同时,可以实现植物种植流程的可追溯,可以通过可拆卸的挂接平台实现多种作业功能的快速转换,从而适用了农业生产的多种作业任务,提高了农业机器人的利用率与性价比,降低了作业成本;本发明行走于悬空轨道上,能够获得更好的巡检视角及更充裕的采摘、喷药空间,特别适应于露天大田、封闭大棚等种植场景;而且由于机器人无需着地,还可以避免机器人对作物的损坏;本发明具备自动巡检功能,可以在启动采摘、喷药等作业任务之前先执行巡检模式,具体基于机器视觉技术识别出是否需要作物的喷药及果实的采摘,具备更强的自动化水平,可极大提高农业生产效率;本发明可实现空气净化、采摘、配方施肥(水肥)、喷药、运输等功能。
附图说明
16.图1为本发明装配机器人的农业作物系统示意图。
17.图2为图1中a的放大示意图。
18.图3为本发明的机器人仰视图。
19.图4为本发明的机箱安装架示意图。
20.图5为本发明的机架示意图。
21.图6为本发明的光伏安装板示意图。
22.图7为本发明的基站示意图。
23.图8为本发明的装配装载模块的农业作物系统示意图。
24.图9为图8中b的放大示意图。
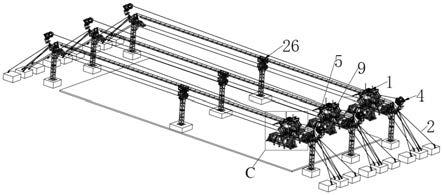
25.图10为本发明的装配水肥模块的农业作物系统示意图。
26.图11为图10中c的放大示意图。
27.图12为本发明的水肥模块示意图。
28.图13为本发明的装配杀菌模块的农业作物系统示意图。
29.图14为图13中d的放大示意图。
30.图15为本发明的涡扇安装架示意图。
31.图16为本发明的涡扇内部结构示意图。
32.图17为本发明的实施例二的示意图。
33.图18为本发明的实施例三的示意图。
34.图19为本发明的实施例四的示意图。
35.图20为本发明的实施例四中水肥安装架的示意图。
具体实施方式
36.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
37.需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,遂图式中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
38.本发明实施例中所有方向性指示(诸如上、下、左、右、前、后、横向、纵向
……
)仅用于解释在某一特定姿态下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
39.实施例一:
40.如图1-16所示,一种农业作物的作业系统,包括机器人1、钢索装置3、驱动装置4、功能模块以及若干基站2,钢索装置3连接两组基站2,钢索装置3承托机器人1,驱动装置4控制机器人1沿钢索装置3移动,功能模块可拆卸安装在机器人1。
41.功能模块包括监测模块或/和装载模块9或/和水肥模块5或/和杀菌模块6或/和供电模块7。
42.本实施例中,机器人1上至少安装功能模块中至少一种模块,功能模块与机器人1采用可拆卸安装方式进行安装,实现多种作业功能的快速转换,从而适用了农业生产的多种作业任务,提高了农业机器人的利用率与性价比,降低了作业成本。
43.如图1-6所示,机器人1包括机架11、主机装置、承托装置14,主机装置、承托装置14和功能模块安装在机架11上,承托装置14用于机架11、主机装置和功能模块,功能模块包括监测模块、装载模块9、水肥模块5、杀菌模块6、供电模块7,机架11至少安装功能模块中至少一种模块。
44.机架11包括机架横杆111和机架直杆112,机架横杆111设置有两组,两组机架横杆111平行设置,且通过机架横短杆固设连接,机架直杆112与机架横杆111通过机架连接板116固设连接,且两者呈相互垂直状态,且机架直杆112的长度方向与机器人1的移动方向一致,进一步的,为保证两者间的稳定性,机架直杆112与机架横杆111连接有机架加强板113,通过机架加强板113保证两者的固定的稳定性,防止在重物作用下两者发生形变,为减轻机器人1整体的重量,本实施例中,机架11采用空心结构,外形采用方型,但不限于方型,甚至可采用不规则形状,只要可满足要求即可;机架11上固设有天线组件12,天线组件12设置有两组,且两组天线组件12安装在机架直杆112的两端,天线组件12包括天线121和天线安装块122,天线安装块122固设在机架直杆112上,天线121安装在天线安装块122上,通过天线121实现信息传输和交互。
45.主机装置包括主机箱13,主机箱13是作业系统以及机器人1作业的控制中心,主机箱13包括控制模块、动力模块和巡检组件,控制模块控制动力模块和巡检组件的运行,控制模块包括通信接口,控制模块通过通信接口带有的无线或有线通讯模块,与通信设备进行
信息交互,实现对机器人的远程操控,主机箱13还搭载有语音作业组件,通过语音作业组件实现对机器人的语音操控,本实施例通信设备包括手机app或/和中央控制室或/和vr眼镜,优选的,本实施例搭载vr眼镜,实现虚拟现实作业,或可称呼为元宇宙,vr眼镜直观地表现作物的生长状态以及生长环境,并可模拟不同配料下当前作物的生长,使用者可选择系统推荐的配料,也可根据需要调整配方比例,使用者在元宇宙虚拟操作实现对机器人的远程操控,本实施例将人工智能技术与绿色农业技术和机械技术以及电器技术综合应用在对劳动力要求极高的农业基地,达到解放生产力,提升生产效益的目标。
46.中央控制室可采用现有设计,也可直接通过语音,通过语音作业组件对语音指令进行识别实现对监测模块、装载模块9、驱动装置4、水肥模块5、杀菌模块6、供电模块7,通过多种方式实现对机器人进行远程操控,扩大了操控方式的多样性、丰富性以及便捷性,从而使机器人可适应不同环境的要求以及农业生产的多种作业任务要求;通信接口接收通信设备的控制指令和语音作业组件识别的语音数据,通信接口包括主机箱13上的各种有线或无线通信接口,如网络接口、usb接口、视频接口、蓝牙、wifi、4g\5g等;控制模块通过动力模块控制机器人沿轨道来回运动;巡检组件包括接收模块、存储模块和操作模块,存储模块内配置有多种种植作物以及养殖生物的信息,操作模块输入设定的作物信息及种植或养殖信息和操作,接收模块接收监测模块采集的作物实时数据,监测模块对作物区进行24小时网络视频监控,接收模块将作物实时数据与存储模块的作物数据对比,进行分析诊断处理,判定作物的实时状态,比如种植作物时,判断作物的生长阶段以及根据作物叶片颜色、形状等因素判断现阶段作物是否生长良好,并根据判断的结果,操作模块作出相应的作业,即通过机器视觉技术实现机器人自动种植以及养殖的功能;本实施例通过巡检组件可实现机器人1的巡检模式,在启动采摘、喷药等作业任务之前可先执行巡检模式,基于机器视觉技术识别出是否需要作物的喷药及果实的采摘,具备更强的自动化水平,可极大提高农业生产效率。
47.本实施例通过巡检组件实现网络化、智能化的农业技术发展,实现了植物种植过程的全程记录和全程辅助指导,在可以提高农产品产值的同时,可以实现植物种植流程的可追溯。
48.本实施例中,监测模块可包括摄像机或/和热像仪、声音采集器或/和音响,监测模块采用摄像机或/和热像仪采集作物的图像或/和热像数据,监测模块通过声音采集器采集作物的声音数据,音响将信号数据进行传输。
49.本实施例中,控制模块可设置为移动终端,如手机、笔记本等或固定终端。
50.主机箱13通过机箱安装架10固定在机架11上,机箱安装架10包括两组机箱固定组件102和连接两组机箱固定组件102的机箱连接杆101构成,两组机箱固定组件102沿机架直杆112的长度方向对称设置,机箱连接杆101将两组机箱固定组件102固定连接,机箱固定组件102包括两组机架卡板1021,两组机架卡板1021上下对称设置,两组通过机架卡板连接杆1023连接,机架卡板1021上固设有卡板凹口10211,卡板凹口10211由若干类似台阶型结构的槽口构成,两组机架卡板1021上的卡板凹口10211位置相对,形成穿腔,机架直杆112穿过两组穿腔,并通过相应的结构将两者固定连接,本实施例机架直杆112穿过若干类似台阶型结构的槽口,一方面可避免机架直杆112在安装过程中发生位置偏移,另一方面不同槽口可适应不同尺寸的机架直杆112,提高了机架直杆112与机箱安装架10安装的效率;机箱安装架10上还固设有机箱安装板1022,通过机箱安装板1022将主机箱13安装在机箱安装架10
上。
51.供电模块7可采用蓄电池或充电控制模块,也可采用外部电源,如太阳能,本实施例中,如图2所示,机器人1采用太阳能供电,具体来说,本实施例中,供电模块7包括光伏板71和光伏安装板72,供电模块7安装在机架11的侧面,具体来说,机架横杆111上固设有安装供电模块7的供电安装板115,光伏安装板72安装在供电安装板115,光伏板71安装在光伏安装板72,从而实现供电模块7与机架11的安装,本实施例中,供电模块7设置有四组,且采用30w的光伏板71,进一步的,光伏安装板72包括与供电安装板115安装的机架安装部721以及与光伏板安装的光伏安装部722,机架安装部721水平设置,光伏安装部722与机架安装部721呈倾斜设置,且倾斜角度优选为45
°
,不仅可避免冰雪或灰尘的堆积,也可增加光伏板71的太阳能接收量,进一步的,一组供电模块7可包括多组光伏安装板72,多组光伏安装板72可位于接收不同方向太阳的位置,增加光伏板71的太阳能接收量,进一步的,光伏安装板72的形状可设置为弧形或其他形状,相应的光伏板71形状与光伏安装板72相配,可根据实际需要进行设定。
52.承托装置14包括两组滑轮组件和两组导轮组件,一组导轮组件包括导轮固定板141,导轮固定板141上固设有两组导轮142,两组导轮142沿机架横杆111的长度方向分布,两组导轮组件对称固设在机架直杆112上且位于主机箱13的前后位置,一组滑轮组件包括滑轮固定板143,滑轮固定板143上固设有两组滑轮144,两组滑轮144沿机架直杆112的长度方向分布,如图3所示,同侧的两组导轮142以及两组滑轮144共线或近似共线,机器人1通过两组滑轮组件和两组导轮组件与钢索装置3配合,保证了机器人1传输的稳定性。
53.机器人1可单独应用于现有设备,采用现有方法运行。
54.本实施例基站2至少包括两组,两组基站2设置为一个单元,一个单元的两组基站2分布在作物区的两边,且位于作物区两边的两组基站2一一对应,一个单元与一组机器人1对应,一个单元设置一组钢索装置3和驱动装置4;优选的,一个单元的两组基站2之间可设置停靠基站26,停靠基站26高度与基站2一致,停靠基站26一方面可作为机器人1补充能源的供应设备,也可对承托装置14进行支撑,使本发明以及机器人实现远距离移动,适应大范围的作物区,本实施例中,基站2设置有六组,在实际情况下,可根据作物区的大小,可增加或减少基站2数量。
55.如图7所示,基站2包括基站立柱22和基站横梁23,基站立柱22和基站横梁23由若干管道构成,本实施例中基站立柱22的外形尺寸设置为300x300x1200mm,基站横梁23的外形尺寸设置为300x300x800mm,若干基站立柱22沿竖直方向分布固设连接,基站横梁23固设在位于上侧的基站立柱22上,基站横梁23和基站立柱22形成t字型结构,基站横梁23与基站立柱22之间设置有基站悬梁24,通过基站悬梁24实现基站横梁23固定的稳定性,加强基站横梁23的强度,基站立柱22底部固设有基站固定座21,本实施例中,基站固定座21安装在基站底座20。
56.为保证基站2的稳定性,基站2还包括基站斜拉机构25,基站斜拉机构25包括两组基站斜拉基座251,每组基站斜拉基座251上固设有基站斜拉绳固定座252,基站斜拉绳固定座252与基站横梁23间固设有基站斜拉绳253,基站斜拉基座251分别位于基站2的两侧,基站2以及两组基站斜拉基座251呈三角分布,基站2整体安装后,通过基站斜拉绳253,保证整体的稳定性;在其他实施例中,基站固定座21也可直接安装在地面,基站斜拉绳固定座252
也可直接安装在地面,只要能保证基站2稳定安装即可,从而保证基站2的稳定性。
57.基站2可单独应用于现有设备,采用现有方法运行。
58.本实施例中,一个单元的两组基站2之间通过钢索装置3连接,具体来说,钢索装置3包括主钢索30、副钢索33和钢索固定机构,主钢索30位于副钢索33的上方,基站1上固设有钢索承托架32,钢索承托架32上固设有主钢索套31,主钢索30套设在主钢索套31内,基站1上固设有副钢索套34,副钢索33套设在副钢索套34内,主钢索30和副钢索33固设在钢索固定机构,具体来说,钢索固定机构包括钢索斜拉基座35,钢索斜拉基座35上固设有钢索斜拉绳固定座36,主钢索30和副钢索33分别与钢索斜拉绳固定座36固设,从而保证主钢索30和副钢索33的稳定性;在其他实施例中,钢索斜拉基座35也可直接安装在地面,钢索斜拉基座35也可直接安装在地面,只要能保证主钢索30和副钢索33稳定安装即可,从而保证主钢索30和副钢索33的稳定性。
59.一个单元内的两组基站2通过主钢索30和副钢索33连接,本实施例中,主钢索30设置两组,副钢索33设置两组,两组主钢索30的间距小于以及两组副钢索33的间距,形成类梯形结构,且主钢索30以及副钢索33分别位于梯形的四个角上,承托装置14的两组滑轮组件和两组导轮组件分别与主钢索30相抵,机器人1沿主钢索30移动,机器人1在悬空的主钢索30上行走,可获得更好的巡检视角及更充裕的采摘、喷药空间,特别适应于露天大田、封闭大棚等种植场景;而且由于机器人无需着地,还可以避免机器人对作物的损坏。
60.钢索装置3可单独应用于现有设备,采用现有方法运行。
61.驱动装置4包括驱动安装架45,驱动安装架45固设在基站2的基站横梁23,驱动安装架45上固设有驱动电机44和驱动架42,驱动架42上绕设有驱动拉索41,驱动拉索41与固设在机架直杆112的拉索套114连接,一个单元的两组基站2分别通过驱动拉索41与机器人1的两端连接,驱动电机44控制任意驱动拉索41转动,进而控制机器人1沿主钢索30来回移动,驱动装置4一般与功能模块同步启动,机器人1实现巡检、监测、投料、浇水、施肥、杀菌以及雾喷等功能;驱动电机44控制机器人1的移动速度,可适应不同作物的不同需求。
62.驱动装置4可单独应用于现有设备,采用现有方法运行。
63.如图8-9所示,装载模块9包括两组装载架91,装载架91上固设有装载构件94,装载构件94用于挂载功能配件。
64.功能配件包括铺膜模块或/和播种模块或/和打孔模块或/和投料模块或/和浇水模块或/和收割模块,功能配件通过装载模块9搭载在机器人1的下方,降低了机器人1的重心,提高了稳定性,装载模块9与钢索装置3的主钢丝30以及辅钢丝33的配合,可装载200kg的重物,实现作业系统的重载运输,从而适用了农业生产的多种作业任务,分布式的基站2、装载模块9以及钢索装置3构成农业全地形的重载运输。
65.两组装载架91对称安装在机架11的机架横杆111上,两组装载架91的分布方向与机器人1的移动方向垂直,两组装载架91的间距与副钢索33的间距相配,装载架91的下方固设有装载固定板92,两组装载构件94固设在装载固定板92的两端,两组装载构件94沿副钢索33的长度方向分布,装载构件94用于搭载功能配件。
66.装载构件94在竖直方向的横截面设置为c型,c型的开口方向水平且朝向副钢索33,装载构件94的c型设计有利于对功能配件进行挂设或搭载,装载构件94的开口的上下方向固设有承载轮951,承载轮951与副钢索33相抵,通过副钢索33对装载模块9进行承托。
67.装载模块9还包括限制装置96,限制装置96设置有两组且安装在两组装载架91的相对面上,限制装置96上固设有限制轮961,限制装置96对挂设或搭载的功能配件进行限制。
68.装载模块9可单独应用于现有设备,采用现有方法运行。
69.如图10-12所示,水肥模块5包括水肥管50和水肥组件51,水肥组件51包括水肥伸缩组件511、水肥架512和水肥桶513,水肥伸缩组件511控制水肥桶513的位置,水肥桶513安装在水肥架512上,水肥桶513与水肥管50连通,水肥管50向作物区喷淋水肥。
70.水肥管50位于一个单元的两组基站2之间,且沿主钢丝30的长度方向分布,水肥管50上固设有若干均匀分布的水肥喷淋孔501,水肥喷淋孔501朝向作物区,水肥通过水肥喷淋孔501向作物区喷淋;水肥管50可由若干管道组合构成,也可由一组管道单独设置。
71.水肥管50在竖直方向上位于主钢丝30的下方,在水平方向上位于两组主钢丝30的中间位置,水肥管50与两组主钢丝30之间分别通过连接杆502连接,水肥管50、两组主钢丝30以及连接杆502形成三角状态,保证水肥管50安装的稳定性;通过水肥管50的设计,在某些情况下,机器人1装载水肥组件51后可保持固定不动,水肥管50向作物区喷淋水肥。
72.水肥组件51包括水肥伸缩组件511、水肥架512和水肥桶513,水肥伸缩组件511包括伸缩架5111和液压杆5112,本实施例中,液压杆5112沿竖直方向与伸缩架5111固设连接,液压杆5112伸缩后控制伸缩架5111在竖直方向的伸缩,水肥伸缩组件511的上方固设有水肥连接组件510,水肥连接组件510与机器人1的机架11固设连接。
73.水肥架512固设在水肥伸缩组件511的下端,水肥架512包括第一箱体5121和第二箱体5122,第一箱体5121设置有两组,且对称固设固设在第二箱体5122的两端,水肥桶513安装在第二箱体5122,第一箱体5121可安装原料桶(图未显示),原料桶与水肥桶513连通,将原料按需输入水肥桶513内,实现自动配料的功能;水肥桶513可采用现有的设备,水肥桶513的尺寸可按需设置。
74.水肥架512下方还固设有水肥支撑架514,水肥支撑架514可与地面接触,水肥支撑架514对水肥组件51进行支撑,降低机器人1的装载负担。
75.水肥伸缩组件511可控制水肥桶513的升降位置,以便适应不同作物的施肥要求,本实施例中,根据水肥组件51的设计,降低了水肥桶513的重心,有利于机器人1的稳定性。
76.水肥模块5可单独应用于现有设备,采用现有方法运行。
77.如图13-16所示,杀菌模块6包括气体杀菌装置和液体杀菌装置,气体杀菌装置包括紫外线灯622和杀菌网623,液体杀菌装置包括杀菌液和雾喷机构,紫外线灯622和杀菌网623用于气体杀菌,液体杀菌装置采用杀菌液杀菌。
78.气体杀菌装置包括涡扇62,涡扇62通过涡扇安装架66安装在机架11上方,本实施例中,涡扇62的进口端尺寸大于出口出口端尺寸,沿空气流动方向涡扇62的尺寸逐渐减少,有利于对空气进行压缩,增强空气的流动速度;气体杀菌装置设置有两组,两组对称安装在机架11上,且涡扇62的空气流动方向与机器人1的移动方向一致;本实施例中,涡扇安装架66为框架结构,涡扇安装架66的上表面设置弧形面661,弧形面661的弧度与涡扇62进口端的外表面弧度相配,涡扇62进口端与涡扇安装架66的上表面固设连接,从而将涡扇62固定安装在机架11上。
79.涡扇62包括涡壳625和涡架620,涡架620构成涡扇62的整体框架,涡壳625安装在
涡架620的外表面,将涡架620以及涡架620内安装的设备整体包裹在内部,并形成空气的流通通道;涡壳625内部设置有隔音棉,外部设置有高强度保温隔热防火棉,从而降低对外部环境的干扰。
80.涡扇62内还设置有风机621,风机621安装在涡扇62的进口端,风机621启动,将涡扇62内部形成负压环境,从而使空气不断进入涡扇62进行净化工作。
81.紫外线灯622和杀菌网623均安装在涡扇62内,具体来说,如图15所示,杀菌网623倾斜安装在涡扇62内,以便获得空气与杀菌网623的最大的接触面积,若干杀菌网623沿空气的流通方向依次分布,实现对空气多次以及多级的净化处理,获得最大的空气净化效果。
82.杀菌网623由光催化网组成,光催化网由光触媒组成,优选采用二氧化钛,紫外线灯622安装在涡扇62内部,紫外线灯622启动发射一定波段的紫外光线,优选波段设置为365nm,紫外光线发射至杀菌网623,即对光触媒进行激活,光触媒产生强氧化性物质,此时空气流通时,可有效降解空气中有毒有害气体,同时有效杀灭多种细菌,并能将细菌或真菌释放出的毒素分解及无害化处理,实现高效净化空气的目的。
83.本实施例采用光触媒消杀,能迅速杀灭漂浮在空气中及附着在气溶胶上的细菌、病菌、病毒,包括h1n1、sars、流感病毒、冠状病毒等等,灭菌率高达99%以上;同时对美国环境公署公布的九大类114种有毒污染气体和臭气,均能快速去除,并最终降解成二氧化碳和水,有效去除率平均高达99.9%以上;光触媒消杀无强腐蚀性、无任何的毒副作用。
84.本实施例中,杀菌液由稀释液和杀菌原液按一定比例混合而成,雾喷机构包括雾喷管63和雾喷头60,杀菌液由雾喷管63或雾喷头60向外雾喷杀菌液消杀灭菌。
85.液体杀菌装置还包括杀菌伸缩组件611、杀菌架61、稀释桶65和杀菌桶64,杀菌伸缩组件611控制稀释桶65的位置,稀释桶65安装在杀菌架61上。
86.液体杀菌装置包括安装在涡扇62的出口端的出液管624,出液管624一端通过管道分别与稀释桶65和杀菌桶64连通,管道内设置有比例泵(图未显示),出液管624的另一端与雾喷头60连通,雾喷头60可采用现有的设备,杀菌桶64内装有杀菌原液,如光催化原液或次氯酸钠,稀释桶65内装有稀释液,稀释对杀菌原液进行稀释,以达到不同环境以及不同杀菌效果的要求,稀释液可采用水,比例泵调节稀释桶65以及杀菌桶64的液体输送比例,稀释桶65的稀释液以及杀菌桶64的杀菌原液通过设定的比例直接输送至出液管624,并通过雾喷头60向外雾喷调配后的杀菌液,即稀释桶65、杀菌桶64、出液管624以及雾喷头60形成第一雾喷通道,第一雾喷通道的雾喷面积由雾喷头60的喷射面积决定,作物区或消杀灭菌区域面积较小时,优先采用雾喷头60进行雾喷。
87.雾喷管63与出液管624连通,雾喷管63上固设有雾喷孔(图未标识),即稀释桶65、杀菌桶64、出液管624以及雾喷管63形成第二雾喷通道,优选的,相邻单元的雾喷管63相互连通,构成大面积的雾喷区域,第二雾喷通道的雾喷面积由雾喷管63的喷射面积决定,作物区或消杀灭菌区域面积较大时,优先采用雾喷管63进行雾喷。
88.通过比例泵调节稀释桶65以及杀菌桶64的液体输送比例配比杀菌液,无需事先对杀菌液进行调配,减少工序,提高杀菌效率,以及自动化程度,并且通过雾喷头60或雾喷管63对作物区或消杀灭菌区域进行消杀灭菌,可适应不同的作物区或消杀灭菌区域。
89.驱动装置4驱动机器人1沿钢索装置3来回移动,使机器人1装载杀菌模块6在作物区或消杀灭菌区域来回移动进行消杀灭菌。
90.杀菌伸缩组件611包括杀菌伸缩架6111和杀菌液压杆6112,本实施例中,杀菌液压杆6112沿竖直方向与杀菌伸缩架6111固设连接,杀菌液压杆6112伸缩后控制杀菌伸缩架6111在竖直方向的伸缩,杀菌伸缩组件611的上方固设有杀菌连接组件610,杀菌连接组件610与机器人1的机架11固设连接,液体杀菌装置设置有两组,对称固设在机架11的两侧,两组液体杀菌装置的分布方向与机器人1的移动方向垂直。
91.杀菌架61固设在杀菌伸缩组件611的下端,杀菌架61包括杀菌第一箱体6121和杀菌第二箱体6122,杀菌第一箱体6121设置有两组,且对称固设固设在杀菌第二箱体6122的两端,稀释桶65安装在杀菌第二箱体6122,杀菌桶64也可安装在杀菌第一箱体6121,或杀菌桶64安装在第二箱体6122,两组稀释桶65分别安装在第一箱体6121,杀菌桶64与稀释桶65分别通过比例泵与出液管624连通,将稀释液以及杀菌原液按比例混合成杀菌液,实现自动配料的功能;稀释桶65可采用现有的设备。
92.杀菌架61下方还固设有杀菌支撑架614,杀菌支撑架614可与地面接触,杀菌支撑架614对液体杀菌装置进行支撑,降低机器人1的装载负担。
93.杀菌伸缩组件611可控制稀释桶65的升降位置,以便适应不同环境的杀菌要求,本实施例中,根据液体杀菌装置的设计,降低了稀释桶65的重心,有利于机器人1的稳定性。
94.本实施例中,杀菌模块6可应用于作物,对作物所属环境以及作物本身进行灭菌消杀,保证作物的存活率,以及对公共环境和家庭环境采取污染治理以及灭菌消杀工作,灭菌消杀方式安全无强烈刺鼻味;有效且彻底,灭菌率高达99%以上以及没有毒副作用。
95.杀菌模块6可单独应用于现有设备,采用现有方法运行。
96.本实施例中,各结构的主要材料采用航空铝材国标6061-t6,具有环保、轻型的特性。
97.本实施例中,对光触媒对作物的杀菌防治效果进行对照实验:
98.试验作物:黄瓜,品种为“金胚99”杂交一代;
99.试验的防治对象:黄瓜霜霉病;
100.试验药剂:1%tio2;
101.对照药剂:1、80%代森锰锌wp;2、tmax助剂;
102.试验结果见表1:
103.表1
[0104][0105]
由表1可知,1%tio2对黄瓜霜霉病有较好的防治效果。
[0106]
实施例二:
[0107]
如图17所示,本实施例与实施例一的区别在于,实施例一中供电模块7安装在机架11的侧面,且光伏板71倾斜设置,而本实施例中,供电模块7安装在机架11的上方。
[0108]
供电模块7包括光伏板71和光伏安装板72,光伏安装板72设置有四组,呈矩形分布连接光伏板71和机架加强板113,光伏板71位于主机箱13的上方。
[0109]
实施例三:
[0110]
如图18所示,本实施例与实施例一的区别在于,实施例一中主钢丝30设置有两组,主钢丝30支撑承托装置14,机架11下方固设装载模块9,辅钢丝33与支撑装载模块9,装载模块9用于搭载功能配件,而本实施例中,主钢丝30设置为一组,主钢丝30支撑承托装置14,机架11下方固设支撑模块16,辅钢丝33用于支撑支撑模块16。
[0111]
主钢丝30与两组辅钢丝形成三角结构。
[0112]
实施例四:
[0113]
如图19-20所示,本实施例与实施例一的区别在于,实施例一中水肥组件51包括水肥伸缩组件511、水肥架512和水肥桶513,水肥桶513安装在水肥架512,水肥架512通过水肥伸缩组件511与机架11连接,实施例一中,水肥组件51具备伸缩功能,而本实施例中,水肥桶513通过水肥安装架61安装在机架11上,本实施例中水肥安装架61不具备伸缩功能。
[0114]
水肥安装架61包括水肥架固定器611、水肥架板613和水肥架杆614,水肥架板613和水肥架杆614相互连接,形成中空的方形结构,水肥架固定器611固定在水肥架板613上方,机架11上固设有水肥连接杆615,水肥架固定器611可拆卸安装在水肥连接杆615上,本实施例中,水肥安装架61设置有四组,两组水肥安装架61设置为一个单元,一个单元的两组对称安装在机架11的两侧,且沿机器人的移动方向分布,水肥桶513安装在一个单元的两组水肥安装架61上。
[0115]
上述实施例中,机器人上还设置有防撞雷达(图未显示)、防撞板(图未显示)以及紧急制动装置(图未显示),防撞雷达用于预防碰撞,防撞板用于防撞雷达失效或发生不可控情况的机械防撞,紧急制动装置用于发生碰撞时的紧急自动制动。
[0116]
显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1