用于智慧物流的装箱机器人及装箱方法与流程
1.本发明涉及智慧物流领域,尤其涉及用于智慧物流的装箱机器人及装箱方法。
背景技术:
2.在当今的电子商务时代,全球物流产业有了新的发展趋势,物流是为了满足客户需要而对商品、服务消费以及相关信息从产地到消费地的高效、低成本流动和储存进行的规划、实施与控制的过程,现代物流是经济全球化的产物,也是推动经济全球化的重要服务业。
3.在物流环节中,装箱是一个重要的步骤,装箱可以便于后续的运输,提高物流效率,目前在装箱时,采用机器人进行装箱可以有效地提高装箱效率,然而不同的货物形状也不一样,现有的机器人不能智能地根据货物的形状将其调整到最佳的摆放角度,导致在装箱时不能合理地利用货箱空间,不便于装箱,并且现有机器的夹取装置采用硬性连接,对于一些易碎货物,在将其放置到货箱内的过程中可能会将其损坏。
4.因此,发明能够智能地根据货物的形状将其以合适的角度摆放装箱、能够有效地保护易碎货物不会受损的用于智慧物流的装箱机器人及装箱方法,来解决上述问题中现有技术不便于将不同形状的货物装箱、易碎货物可能会受损的问题很有必要。
技术实现要素:
5.本发明的目的是提供用于智慧物流的装箱机器人及装箱方法,包括有支撑架、控制模块、轮廓传感器、电动推杆、导杆、第一l形架和电机,支撑架上部设有控制模块,支撑架上部设有轮廓传感器,支撑架上部设有电动推杆,支撑架上部固接有一对导杆,电动推杆伸缩轴一端固接有第一l形架,第一l形架与导杆滑动式配合,第一l形架右侧顶部固接有电机,支撑架下部穿过有传送带,还包括有货物夹取机构、货物堆积机构、辅助夹紧机构和缓速下货机构:
6.货物夹取机构,电机上设有货物夹取机构;
7.货物堆积机构,支撑架上设有货物堆积机构;
8.辅助夹紧机构,货物夹取机构上设有辅助夹紧机构,辅助夹紧机构用于辅助货物夹取机构将货物夹取;
9.缓速下货机构,货物夹取机构上设有缓速下货机构,货物在缓速下货机构的运行之下被缓慢地放置到货箱内。
10.进一步说明,货物夹取机构包括有转动架、液压泵、液压油管、密封块、滑动架、第一复位弹簧和夹取架,电机输出轴一端固接有转动架,转动架与第一l形架右侧底部转动式连接,转动架下方设有液压泵,液压泵下方接通有液压油管,液压油管与转动架固接,液压油管内对称滑动式连接有密封块,两块密封块相互远离的一侧均固接有滑动架,滑动架穿过转动架,滑动架与转动架之间连接有第一复位弹簧,滑动架下部固接有夹取架。
11.进一步说明,货物堆积机构包括有固定板、滑动档条、第二复位弹簧、v形板和楔形
板,支撑架下部固接有固定板,固定板位于传送带上方,固定板上滑动式连接有滑动档条,滑动档条与固定板之间连接有第二复位弹簧,夹取架右部固接有v形板,夹取架左部固接有楔形板。
12.进一步说明,辅助夹紧机构包括有转动轴、皮带、开槽块、第一固定架、卡块、磁块、第三复位弹簧和磁吸部件,夹取架上部和下部均转动式连接有转动轴,同侧转动轴之间共同绕有皮带,位于上方的两根转动轴一端均固接有开槽块,两块开槽块错位设置,夹取架顶部固接有第一固定架,第一固定架上滑动式连接有卡块,卡块卡到相邻的开槽块的卡槽上,卡块顶部固接有磁块,卡块与第一固定架之间连接有第三复位弹簧,磁吸部件设于两根导杆之间。
13.进一步说明,开槽块上设有四个卡槽,用于将卡块卡住。
14.进一步说明,磁吸部件包括有第二固定架和磁条,两根导杆左端之间共同固接有第二固定架,第二固定架上呈环形分布的方式设有四根磁条。
15.进一步说明,缓速下货机构包括有第二l形架、弹片和转动块,夹取架下部固接有一对第二l形架,同一对第二l形架相互靠近的一侧均固接有两片弹片,处于下方的转动轴上对称固接有转动块,相邻转动块与弹片贴合。
16.进一步说明,还包括有橡胶球,两个夹取架相互靠近的一侧呈阵列分布的方式设有多个橡胶球,橡胶球位于皮带两侧。
17.进一步说明,还包括有接触传感器,两个夹取架相互靠近的一侧均设有四个接触传感器。
18.进一步说明,用于智慧物流的装箱机器人的装箱方法,包括以下工作步骤:s1:阻挡货物:货物堆积机构将传送带上的货物挡住,使传送带上的货物停留在货物堆积机构上;
19.s2:感应货物形状:通过轮廓传感器感应货物堆积机构上货物的形状,控制模块计算货物的最佳摆放角度;
20.s3:夹取货物:货物夹取机构将货物调整到合适的角度后将其夹取;
21.s4:辅助夹取:通过辅助夹紧机构辅助将货物夹取,用于更好地夹取较大的货物;s5:缓速装箱:通过缓速下货机构使货物夹取机构缓慢地将货物放置到货箱内,避免易碎货物受损。
22.本技术的有益之处在于:
23.1.通过轮廓传感器感应固定板顶部货物的轮廓,用于判断货物的形状,使夹取架调整到合适的角度并让其将货物摆至合适的角度,从而便于根据货物的形状对其进行装箱,更加智能化。
24.2.通过弹片和转动块及其上装置的配合,可以对转动块及其上装置起到缓速的作用,使皮带缓慢地将货物放置到货箱内,避免货物下降的速度过快,从而降低易碎货物受损的风险,实现了能够有效地保护易碎货物不会受损的目的。
25.3.在对较大的货物进行装箱时,橡胶球可以对货物施加阻力,使较大的货物也能缓慢地下降,从而确保较大的货物不会受损。
26.4.通过滑动档条将固定板顶部的货物阻拦,可以保证货物能够停留在固定板顶部,同时在装箱的过程中,滑动档条不会影响该设备正常装箱,便于该设备连续地将货物装箱,自动化程度高。
27.5.通过接触传感器感应货物的大小,使外部自动换箱机自动地更换不同尺寸的货箱,便于该设备根据货物的大小进行装箱。
附图说明
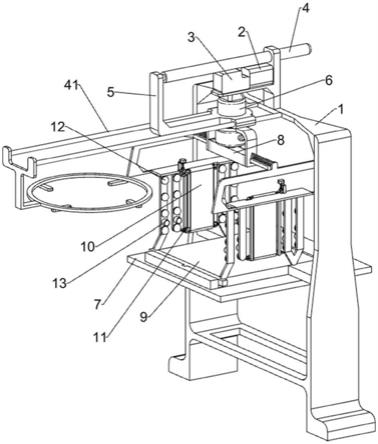
28.图1为本发明的立体结构示意图。
29.图2为本发明的部分立体结构示意图。
30.图3为本发明货物夹取机构的部分立体结构示意图。
31.图4为本发明货物夹取机构的部分剖视立体结构示意图。
32.图5为本发明货物堆积机构的剖视立体结构示意图。
33.图6为本发明辅助夹紧机构的第一种部分立体结构示意图。
34.图7为本发明缓速下货机构的立体结构示意图。
35.图8为本发明辅助夹紧机构的第二种部分立体结构示意图。
36.图9为本发明缓速下货机构的拆分立体结构示意图。
37.以上附图中:1:支撑架,2:控制模块,3:轮廓传感器,4:电动推杆,41:导杆,5:第一l形架,6:电机,7:传送带,8:货物夹取机构,81:转动架,82:液压泵,83:液压油管,84:密封块,85:滑动架,86:第一复位弹簧,87:夹取架,9:货物堆积机构,91:固定板,92:滑动档条,93:第二复位弹簧,94:v形板,95:楔形板,10:辅助夹紧机构,101:转动轴,102:皮带,103:开槽块,104:第一固定架,105:卡块,106:磁块,107:第三复位弹簧,108:第二固定架,109:磁条,11:缓速下货机构,111:第二l形架,112:弹片,113:转动块,12:橡胶球,13:接触传感器。
具体实施方式
38.本发明中使用到的标准零件均可以从市场上购买,异形件根据说明书的和附图的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的螺栓、铆钉、焊接、粘贴等常规手段,在此不再详述。
39.实施例1
40.用于智慧物流的装箱机器人及装箱方法,如图1、图2、图3、图4、图5、图6、图7、图8、图9所示,包括有支撑架1、控制模块2、轮廓传感器3、电动推杆4、导杆41、第一l形架5、电机6、货物夹取机构8、货物堆积机构9、辅助夹紧机构10和缓速下货机构11,支撑架1上部通过螺栓连接有控制模块2,支撑架1上部设有轮廓传感器3,支撑架1上部设有电动推杆4,支撑架1上部固接有一对导杆41,电动推杆4伸缩轴一端固接有第一l形架5,第一l形架5与导杆41滑动式配合,第一l形架5右侧顶部固接有电机6,支撑架1下部穿过有传送带7,电机6上设有货物夹取机构8,货物夹取机构8用于夹取货物,支撑架1上设有货物堆积机构9,货物夹取机构8上设有辅助夹紧机构10,辅助夹紧机构10用于辅助货物夹取机构8将货物夹紧,货物夹取机构8上设有缓速下货机构11,缓速下货机构11用于缓慢地将货物放置到货箱内。
41.货物夹取机构8包括有转动架81、液压泵82、液压油管83、密封块84、滑动架85、第一复位弹簧86和夹取架87,电机6输出轴一端固接有转动架81,转动架81与第一l形架5右侧底部转动式连接,转动架81下方设有液压泵82,液压泵82下方接通有液压油管83,液压油管83内填充有液压油,液压油管83与转动架81固接,液压油管83内对称滑动式连接有密封块84,密封块84与液压油管83内壁贴合,两块密封块84相互远离的一侧均固接有滑动架85,滑
动架85穿过转动架81,滑动架85与转动架81之间连接有第一复位弹簧86,滑动架85下部固接有夹取架87,夹取架87用于夹取货物。
42.货物堆积机构9包括有固定板91、滑动档条92、第二复位弹簧93、v形板94和楔形板95,支撑架1下部通过焊接的方式连接有固定板91,固定板91位于传送带7上方,固定板91上滑动式连接有滑动档条92,滑动档条92用于将固定板91顶部的货物阻拦,滑动档条92与固定板91之间连接有第二复位弹簧93,夹取架87右部固定焊接有v形板94,夹取架87左部固接有楔形板95。
43.辅助夹紧机构10包括有转动轴101、皮带102、开槽块103、第一固定架104、卡块105、磁块106、第三复位弹簧107、第二固定架108和磁条109,夹取架87上部和下部均转动式连接有转动轴101,同侧转动轴101之间共同绕有皮带102,皮带102用于带动货物缓慢地下降,位于上方的两根转动轴101一端均固接有开槽块103,开槽块103上设有四个卡槽,两块开槽块103错位设置,夹取架87顶部固接有第一固定架104,第一固定架104上滑动式连接有卡块105,卡块105卡到相邻的开槽块103的卡槽上,卡块105顶部固接有磁块106,卡块105与第一固定架104之间连接有第三复位弹簧107,两根导杆41左端之间共同固接有第二固定架108,第二固定架108下部设有圆形环,第二固定架108上呈环形分布的方式设有四根磁条109。
44.缓速下货机构11包括有第二l形架111、弹片112和转动块113,夹取架87下部固接有一对第二l形架111,同一对第二l形架111相互靠近的一侧均固接有两片弹片112,处于下方的转动轴101上对称固接有转动块113,通过弹片112和转动块113的配合,转动块113及其上装置转动的速度会减慢,相邻转动块113与弹片112贴合。
45.该设备正常运行时,第二固定架108下方放置有货箱,由传送带7将货物向左传输,由于固定板91右侧设有斜面,使后一个货物推着前一个货物沿着固定板91右侧的斜面移动,使货物置于固定板91顶部,此时轮廓传感器3会感应固定板91顶部货物的轮廓,以判断货物的形状,并将货物形状的信息传递给控制模块2,控制模块2会自动地计算出货物的形状并控制电机6运作,其会带动转动架81及其上装置转动,使两个夹取架87及其上装置被调整到合适的角度,便于夹取架87能够根据货物的形状将其放置到货箱中,使货物的放置角度为最佳,同时可以节省货箱的放置空间,液压油管83内填充有液压油,随后液压泵82会运作,其会将液压油管83内的液压油抽取到其它储油箱内,使密封块84及其上装置朝相互靠近的方向运动,第一复位弹簧86随之会被压缩,从而使得夹取架87平稳地将货物夹取。
46.在夹取架87夹取到货物时,控制模块2会控制电动推杆4伸长,其会带动第一l形架5及其上装置向左运动,当第一l形架5及其上装置运动到第二固定架108上方时,其中两根磁条109刚好位于磁块106上方,其中两根磁条109会吸引磁块106及其上装置向上运动,第三复位弹簧107随之会被压缩,使得卡块105不再卡住开槽块103,由于此时皮带102与货物紧密贴合,并且货物已经与固定板91分离,在货物的重力和皮带102及其上装置的配合下,皮带102及其上装置会转动并带着货物下降,使货物下降到货箱内。在皮带102带着货物下降的过程中,通过弹片112和转动块113的配合,转动块113及其上装置转动的速度会减慢,使得皮带102将货物缓慢地放置到货箱内,进而不会对易碎货物造成损坏。
47.当对一个货物装箱完成时,需要夹取下一个货物并装箱,此时控制模块2会控制电动推杆4收缩复位,上述操作随之会反向复位,卡块105会重新将开槽块103卡住,控制模块2
控制液压泵82将其它储油箱内的液压油抽回到液压油管83内,密封块84及其上装置随之会复位。
48.在电动推杆4伸长时,楔形板95会与滑动档条92分离,同时夹取架87夹着货物向左移动,货物会压着滑动档条92,随后货物会与滑动档条92分离,v形板94会挤压滑动档条92,接着v形板94也会与滑动档条92分离,被压缩的第二复位弹簧93随之会复原并带动滑动档条92及其上装置向上运动,使得滑动档条92可以将下一个推到固定板91顶部的货物挡住,以保证下一个货物停留在固定板91上,便于后续将下一个货物装箱。当楔形板95及其上装置复位到初始位置时,楔形板95会重新将滑动档条92抵住,从而不会影响夹取架87夹着货物向左移动,既保证了能够顺利地将货物装箱,又确保了下一个货物能够停留在固定板91顶部。
49.实施例2
50.在实施例1的基础之上,如图7所示,还包括有橡胶球12,两个夹取架87相互靠近的一侧呈阵列分布的方式设有多个橡胶球12,橡胶球12可以对货物施加阻力,确保较大的货物也能缓慢地下降,橡胶球12位于皮带102两侧。
51.在货物较小时,皮带102直接与货物接触并将货物夹取,在货物较大时,货物会与橡胶球12接触,由橡胶球12辅助将货物夹取,并且在将较大的货物放下时,橡胶球12可以对货物施加阻力,确保较大的货物也能缓慢地下降。
52.实施例3
53.在实施例2的基础之上,如图7所示,还包括有接触传感器13,两个夹取架87相互靠近的一侧均设有四个接触传感器13,接触传感器13用于检测货物的大小。
54.接触传感器13用于检测货物的大小,当货物较大时,接触传感器13会与货物接触,接触传感器13会将货物较大的信息传递给外部自动换箱机,使其更换一个较大的货箱,以便于对较大的货物进行装箱,当货物较小时,货物不会接触到接触传感器13,接触传感器13会将货物较小的信息传递给外部自动换箱机,使其更换一个较小的货箱,便于该设备根据货物的大小进行装箱。
55.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1