一种重载电池包搬运桁架的制作方法
1.本发明主要涉及电池自动化更换的技术领域,具体涉及一种重载电池包搬运桁架。
背景技术:
2.汽车换电系统需要准确无误地将电池包进行更换,现有换电设备搬运电池包时在移动过程中会出现晃动,同时定位精度不高,给机械自动化更换带来了很大的不便。
技术实现要素:
3.本发明主要提供了一种重载电池包搬运桁架,用以解决上述背景技术中提出的电池包定位精度低,移动过程中易晃动等技术问题。
4.本发明解决上述技术问题采用的技术方案为:一种重载电池包搬运桁架,包括:移动单元,包括移动架体,用以在桁架上移动;还包括:提升单元,用以提起电池包;所述提升单元包括:提升架体;第一齿条,沿竖直方向固设于所述移动架体;以及驱动马达,固设于所述提升架体,所述驱动马达输出端传动连接有第一齿轮,所述第一齿轮和所述第一齿条相啮合。
5.优选的,所述第一齿条和所述驱动马达均设有两组。
6.优选的,所述提升单元还包括直线导轨,所述直线导轨固设于所述移动架体;所述提升架体配合滑动连接于所述直线导轨。
7.优选的,所述提升单元还包括拖链,所述拖链两端分别固设于所述移动架体和所述提升架体。
8.优选的,还包括水平差补单元,所述水平差补单元包括:上水平架体,活动连接于所述提升架体底部;下水平架体,通过球型万向轴活动连接于所述上水平架体底部;视觉相机,固设于所述下水平架体,所述视觉相机输出端向下用以扫描所述电池包;四个电直齿检测器,分别固设于所述下水平架体的四个角位置,用以确定所述电池包的水平角度;以及四个第一电缸,分别固设于所述上水平架体的四个角位置,所述第一电缸输出端向下和所述下水平架体相接触,通过控制所述第一电缸输出端的伸出长度对所述下水平架体进行水平差补。
9.优选的,所述水平差补单元还包括旋转驱动装置,所述旋转驱动装置固设于所述提升架体;所述旋转驱动装置输出端传动连接有第二齿轮,所述第二齿轮和所述上水平架体顶部的第三齿轮相啮合。
10.优选的,还包括水平对称设置的两个卡接单元,所述卡接单元包括:第二电缸,固设于所述下水平架体;以及一对卡爪,活动连接于所述下水平架体,其中一个所述卡爪传动连接于所述第二电缸的输出端;两个所述卡爪相向的一侧均固连有第二齿条,两个所述第二齿条分别啮合于所述下水平架体上第四齿轮的两侧。
11.与现有技术相比,本发明的有益效果为:通过提升架体上的驱动马达驱动和第一
齿条相啮合的第一齿轮转动,进而带动整体装置在竖直方向上移动,其中第一齿条和第一齿轮的配合承载力较大、速度快、噪音低且成本低,适用于本发明的重载电池包的搬运,因此本实施例提供的一种重载电池包搬运桁架,解决了现有技术中电池包时在移动过程中易晃动的技术问题。
12.以下将结合附图与具体的实施例对本发明进行详细的解释说明。
附图说明
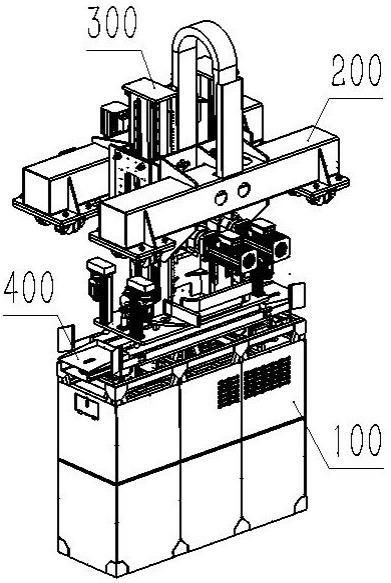
13.图1为本发明的整体结构工作状态示意图;图2为本发明的整体结构示意图;图3为本发明的移动单元结构示意图;图4为本发明的提升单元结构示意图;图5为本发明的水平差补单元结构示意图;图6为本发明的卡接单元结构示意图。
14.图中:100电池包;200移动单元;201移动架体;300提升单元;301提升架体;302第一齿条;303驱动马达;304直线导轨;305拖链;400水平差补单元;401上水平架体;402下水平架体;403视觉相机;404电直齿检测器;405第一电缸;406旋转驱动装置;500卡接单元;501第二电缸;502卡爪;503第二齿条;504第四齿轮。
具体实施方式
15.为了便于理解本发明,下面将参照相关附图对本发明进行更加全面的描述,附图中给出了本发明的若干实施例,但是本发明可以通过不同的形式来实现,并不限于文本所描述的实施例,相反的,提供这些实施例是为了使对本发明公开的内容更加透彻全面。
16.需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上也可以存在居中的元件,当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件,本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
17.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常连接的含义相同,本文中在本发明的说明书中所使用的术语知识为了描述具体的实施例的目的,不是旨在于限制本发明,本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
18.请着重参照附图1-6,本发明提供了一种重载电池包搬运桁架,用以移动电池包100,进行换电作业。
19.整体装置包括移动单元200,包括移动架体201,用以在桁架上移动;还包括提升单元300,用以提起电池包100;提升单元300包括:提升架体301,第一齿条302以及驱动马达303,第一齿条302沿竖直方向固设于移动架体301,驱动马达303固设于提升架体301,驱动马达303输出端传动连接有第一齿轮,第一齿轮和第一齿条302相啮合。
20.本发明采用上述的结构设置,通过提升架体301上的驱动马达303驱动和第一齿条302相啮合的第一齿轮转动,进而带动整体装置在竖直方向上移动,其中第一齿条302和第一齿轮的配合承载力较大、速度快、噪音低且成本低,适用于本发明的重载电池包100的搬运,因此本实施例提供的一种重载电池包搬运桁架,能够解决现有技术中电池包时在移动过程中易晃动的技术问题。
21.考虑到增大负载,在上述实施例的基础上,本发明再提供一个优选的技术方案,第一齿条302和驱动马达303均设有两组,两组对称设置进一步提高了整体装置的负载能力。
22.考虑到提升单元300的稳定性,在上述实施例的基础上,本发明再提供一个优选的技术方案,提升单元300还包括直线导轨304,直线导轨304固设于移动架体201;提升架体301配合滑动连接于直线导轨304,直线导轨304的选用摩擦阻力小、负载大、安装方便且使用寿命长,适于实用。
23.考虑到便于束缚电线以方便其转动及运动,在上述实施例的基础上,本发明再提供一个优选的技术方案,提升单元300还包括拖链305,拖链305两端分别固设于移动架体201和提升架体301。
24.考虑到提高对电池包100的定位精度,在上述实施例的基础上,本发明再提供一个优选的技术方案,还包括水平差补单元400,水平差补单元400包括上水平架体401,下水平架体402,视觉相机403,四个电直齿检测器404以及四个第一电缸405,上水平架体401活动连接于提升架体301底部,下水平架体402通过球型万向轴活动连接于上水平架体底部401,视觉相机403固设于下水平架体402,视觉相机403输出端向下用以扫描电池包100,四个电直齿检测器404分别固设于下水平架体402的四个角位置,用以确定电池包100的水平角度,四个第一电缸405分别固设于上水平架体401的四个角位置,第一电缸405输出端向下和下水平架体402相接触,通过控制第一电缸405输出端的伸出长度对下水平架体402进行水平差补。
25.汽车行驶至整体装置下方后,本发明首先通过视觉相机403扫描电池包100上方卡扣位置,然后提升单元300下降,四个电直齿检测器404接触电池包100来确定其在车上的水
平角度,分别反馈给四个第一电缸405,第一电缸405输出端向下和下水平架体402相接触,通过控制其输出端的伸出长度对下水平架体402进行水平差补,以此提高对电池包100的定位精度。
26.考虑到可以进一步提高对电池包100的定位精度,在上述实施例的基础上,本发明再提供一个优选的技术方案,水平差补单元400还包括旋转驱动装置406,旋转驱动装置406固设于提升架体301,旋转驱动装置406输出端传动连接有第二齿轮,第二齿轮和上水平架体401顶部的第三齿轮相啮合,即旋转驱动装置406通过驱动输出端的第二齿轮,带动与其相啮合的第三齿轮转动,进而带动上水平架体401整体转动,进一步提高对电池包100的定位精度。
27.考虑到抓取电池包100的具体实现,在上述实施例的基础上,本发明再提供一个优选的技术方案,还包括水平对称设置的两个卡接单元500,卡接单元500包括第二电缸501以及一对卡爪502,第二电缸501固设于下水平架体402,一对卡爪502活动连接于下水平架体402,其中一个卡爪502传动连接于第二电缸501的输出端,两个卡爪502相向的一侧均固连有第二齿条503,两个第二齿条503分别啮合于下水平架体402上第四齿轮504的两侧。
28.抓取电池包100时,第二电缸501驱动输出端带动一个卡爪502移动,进而带动分别啮合于第四齿轮504两侧的两个第二齿条503向相反方向移动,从而保证两个卡爪502等量伸出,以便后续提起电池包100。
29.上述结合附图对发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的这种非实质改进,或未经改进将发明的构思和技术方案直接应用于其他场合的,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1