一种自动化抓取装置
1.本发明涉及工业技术领域,具体涉及一种自动化抓取装置。
背景技术:
2.流水线,又称装配线,工业上的一种生产方式,指每一个生产单位只专注处理某一个片段的工作,以提高工作效率及产量,按照流水线的输送方式大体可以分为:皮带流水装配线、板链线、倍速链、插件线、网带线、悬挂线及滚筒流水线这七类流水线。一般包括牵引件、承载构件、驱动装置、涨紧装置、改向装置和支承件等组成,流水线可扩展性高,可按需求设计输送量,输送速度,装配工位,辅助部件。
3.目前的流水线加工过程中,流水线加工成型的物品,需要通过人工将物品从流水线中取出,人工在取出的过程中,需要安排多个人员协同作业,增加了物品生产的成本。
4.有鉴于此,提出本技术。
技术实现要素:
5.有鉴于此,本发明的目的在于提供一种自动化抓取装置,能有效解决流水线加工过程中,流水线加工成型的物品,需要通过安排多个人员协同作业将物品从流水线中取出,增加了物品生产的成本的问题。
6.本发明提供了一种自动化抓取装置,包括控制器、安装底座、u型套管机构以及抓取机构;
7.其中,所述u型套管机构的第一u型臂可转动地配置在所述安装底座上;
8.其中,所述抓取机构包括伸缩组件、抓取组件以及感应模块,所述伸缩组件的第一端配置在所述u型套管机构的第二u型臂上,所述抓取组件配置在所述伸缩组件的第二端,所述感应模块配置在所述抓取组件的中心部;
9.所述控制器的输入端与所述感应模块电气连接,所述控制器的输出端与所述伸缩组件、所述抓取组件以及所述u型套管机构电气连接。
10.优选地,所述u型套管机构包括u型管、管套组件以及动力组件,所述管套组件配置在所述u型管的第一臂上,所述动力组件配置在所述u型管的第一臂侧部。
11.优选地,所述管套组件包括套筒、套柱以及卡合装置,所述套筒配置在所述安装底座的上表面,所述套柱可转动地配置在所述u型管的第一臂的内部,所述套柱的外壁等距开设有多个弧形卡槽,所述u型管的第一臂的内壁两侧等距开设有多个圆孔,所述卡合装置配置在所述u型管和所述套柱之间。
12.优选地,所述卡合装置包括多个挤压弹簧和多个弧形卡柱,每一所述挤压弹簧配置在对应的所述u型管的第一臂内壁两侧的圆孔内部,所述挤压弹簧的一端与所述u型管的第一臂的内壁邸接,所述弧形卡柱嵌设在对应的所述套柱外壁的弧形卡槽上,所述挤压弹簧的另一端与所述弧形卡柱邸接。
13.优选地,动力组件包括控制箱、配置在所述控制箱内部的第一伺服电机、第一斜形
齿轮以及第二斜形齿轮,所述第一斜形齿轮配置在所述第一伺服电机的输出轴上,所述第二斜形齿轮套设在所述套柱的底部,所述第一斜形齿轮与所述第二斜形齿轮啮合连接。
14.优选地,所述伸缩组件包括设备箱、连接杆、第一圆形齿轮、第二圆形齿轮、第二伺服电机以及第三伺服电机;
15.其中,所述设备箱配置在所述u型管的第二臂上,所述连接杆的第一端部穿过所述设备箱配置在所述u型管的第二臂上,所述连接杆的第一端部两侧开设有齿槽,所述第一圆形齿轮配置在所述u型管的第二臂的左内壁上,所述第一圆形齿轮与所述齿槽啮合连接,所述第二伺服电机配置在所述设备箱左内壁上,所述第二伺服电机的输出轴与所述第一圆形齿轮的中心处固定连接,所述第二圆形齿轮配置在所述u型管的第二臂的右内壁上,所述第二圆形齿轮与所述齿槽啮合连接,所述第三伺服电机配置在所述设备箱右内壁上,所述第三伺服电机的输出轴与所述第二圆形齿轮的中心处固定连接。
16.优选地,还包括第一固定机构、第一牵引机构、第二固定机构以及第二牵引机构,所述第一固定机构配置在所述u型管的第二臂的左内壁底部,所述第一牵引机构配置在所述设备箱左侧,所述第一固定机构的固定端部与所述第一牵引机构的牵引端部固定连接,所述第二固定机构配置在所述u型管的第二臂的右内壁底部,所述第二牵引机构配置在所述设备箱右侧,所述第二固定机构的固定端部与所述第二牵引机构的牵引端部固定连接。
17.优选地,所述抓取组件包括第四伺服电机、十字型板、多个夹取抓手以及多个电动推杆,所述第四伺服电机配置在所述连接杆的底端,所述十字型板可转动地配置在所述第四伺服电机的输出轴底端,所述十字型板的底端等距开设有四个t型滑槽,每一所述夹取抓手可滑动的配置在所述t型滑槽的内部,所述电动推杆配置在所述t型滑槽的槽壁上,所述电动推杆的伸缩端与所述夹取抓手的第一面固定连接,所述控制器的输出端与所述电动推杆电气连接。
18.优选地,还包括配置在每一所述夹取抓手上的防抖动机构,所述防抖动机构包括气囊、气管、弧形凸起、连接嘴以及配置在所述控制箱顶部的气泵;
19.其中,所述气囊配置在所述夹取抓手的第二面,所述弧形凸起均匀的配置在所述气囊上,所述连接嘴配置在所述气囊的边角处,所述气管配置在所述十字型板的顶端,所述气管的一端通过五通阀与所述连接嘴固定连接,所述气泵的出气端与气管的另一端固定连接。
20.综上所述,本实施例提供的一种自动化抓取装置,通过所述感应模块实时的检测流水线表面的物品,在检测到物品时,所述抓取机构下降抓取物品,物体抓取完毕后,所述u型套管机构带动所述抓取机构和物品一起转动,实现流水线物品的精准夹取放置,从而解决了流水线加工过程中,流水线加工成型的物品,需要通过安排多个人员协同作业将物品从流水线中取出,增加了物品生产的成本的问题。
附图说明
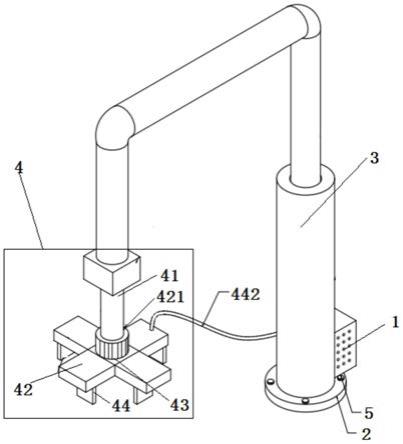
21.图1是本发明实施例提供的一种自动化抓取装置的结构示意图。
22.图2是本发明实施例提供的一种自动化抓取装置的u型套管机构的结构示意图。
23.图3是本发明实施例提供的一种自动化抓取装置的伸缩组件的结构示意图。
24.图4是本发明实施例提供的一种自动化抓取装置的第一固定机构和第一牵引机构
的结构示意图。
25.图5是本发明实施例提供的一种自动化抓取装置的第二固定机构和第二牵引机构的结构示意图。
26.图6是本发明实施例提供的一种自动化抓取装置的抓取组件的结构示意图。
27.图7是本发明实施例提供的一种自动化抓取装置的防抖动机构的结构示意图。
具体实施方式
28.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
29.以下结合附图对本发明的具体实施例做详细说明。
30.请参阅图1,本发明第一实施例提供了一种自动化抓取装置,包括控制器1、安装底座2、u型套管机构3以及抓取机构4;
31.其中,所述u型套管机构3的第一u型臂可转动地配置在所述安装底座2上;
32.其中,所述抓取机构4包括伸缩组件41、抓取组件42以及感应模块43,所述伸缩组件41的第一端配置在所述u型套管机构3的第二u型臂上,所述抓取组件42配置在所述伸缩组件41的第二端,所述感应模块43配置在所述抓取组件42的中心部;
33.所述控制器1的输入端与所述感应模块43电气连接,所述控制器1的输出端与所述伸缩组件41、所述抓取组件42以及所述u型套管机构3电气连接。
34.具体地,在本实施例中,当所述感应模块43检测到流水线物品时,通过所述控制器1启动所述u型套管机构3和所述抓取机构4,所述抓取机构4向下移动抓取物体后,所述u型套管机构3带动所述抓取机构4和抓取到的物体一起转动,以实现对流水线物品精准牢固夹持。其中,所述安装底座2顶端的边侧等距开设有多个安装孔,每一所述安装孔的内部均螺纹连接有固定螺栓5,以确保所述安装底座2的稳定。
35.请参阅图2,在本发明一个可能的实施例中,所述u型套管机构3包括u型管31、管套组件32以及动力组件33,所述管套组件32配置在所述u型管31的第一臂上,所述动力组件33配置在所述u型管31的第一臂侧部。
36.具体地,在本实施例中,所述管套组件32包括套筒321、套柱322以及卡合装置323,所述套筒321配置在所述安装底座2的上表面,所述套柱322可转动地配置在所述u型管31的第一臂的内部,所述套柱322的外壁等距开设有多个弧形卡槽3221,所述u型管31的第一臂的内壁两侧等距开设有多个圆孔311,所述卡合装置323配置在所述u型管31和所述套柱322之间。
37.在本实施例中,所述卡合装置323包括多个挤压弹簧3231和多个弧形卡柱3232,每一所述挤压弹簧3231配置在对应的所述u型管31的第一臂内壁两侧的圆孔311内部,所述挤
压弹簧3231的一端与所述u型管31的第一臂的内壁邸接,所述弧形卡柱3232嵌设在对应的所述套柱322外壁的弧形卡槽3221上,所述挤压弹簧3231的另一端与所述弧形卡柱3232邸接。
38.其中,所述套柱322通过所述卡合装置323套设在所述u型管31的内部,当所述抓取机构4抓取到物体后,通过所述动力组件33转动所述套柱322,所述套柱322转动带动所述u型管31转动,通过所述u型管31转动使夹取物品的所述抓取机构4转动。需要说明的是,在其他实施例中,还可以采用其他类型结构的u型套管机构3,这里不做具体限定,但这些方案均在本发明的保护范围内。
39.在本发明一个可能的实施例中,动力组件33包括控制箱331、配置在所述控制箱331内部的第一伺服电机332、第一斜形齿轮333以及第二斜形齿轮334,所述第一斜形齿轮333配置在所述第一伺服电机332的输出轴上,所述第二斜形齿轮334套设在所述套柱322的底部,所述第一斜形齿轮333与所述第二斜形齿轮334啮合连接。
40.具体地,在本实施例中,当所述第一伺服电机332接收到所述控制器1发送的启动信号时,所述第一伺服电机332的输出轴带动所述第一斜形齿轮333进行转动,由于所述第一斜形齿轮333与所述第二斜形齿轮334啮合连接,因此所述第一斜形齿轮333转动时可带动所述第二斜形齿334进行转动,使得所述套柱322转动。需要说明的是,在其他实施例中,还可以采用其他类型结构的动力组件33,这里不做具体限定,但这些方案均在本发明的保护范围内。
41.请参阅图3,在本发明一个可能的实施例中,所述伸缩组41,包括设备箱411、连接杆412、第一圆形齿轮413、第二圆形齿轮414、第二伺服电机415以及第三伺服电机416;
42.其中,所述设备箱411配置在所述u型管31的第二臂上,所述连接杆412的第一端部穿过所述设备箱411配置在所述u型管31的第二臂上,所述连接杆412的第一端部两侧开设有齿槽4121,所述第一圆形齿轮413配置在所述u型管31的第二臂的左内壁上,所述第一圆形齿轮413与所述齿槽4121啮合连接,所述第二伺服电机415配置在所述设备箱411左内壁上,所述第二伺服电机415的输出轴与所述第一圆形齿轮413的中心处固定连接;所述第二圆形齿轮414配置在所述u型管31的第二臂的右内壁上,所述第二圆形齿轮414与所述齿槽4121啮合连接,所述第三伺服电机416配置在所述设备箱411右内壁上,所述第三伺服电机416的输出轴与所述第二圆形齿轮414的中心处固定连接。
43.具体地,在本实施例中,当感应模块43检测到流水线上的物体时,所述第二伺服电机415以及所述第三伺服电机416分别带动所述第一圆形齿轮413和所述第二圆形齿轮414转动,由于所述第一圆形齿轮413和所述第二圆形齿轮414均与所述连接杆412的第一端部两侧开设的齿槽4121啮合连接,可通过所述第一圆形齿轮413和所述第二圆形齿轮414转动带动所述连接杆4121下降,以实现所述伸缩组件41的伸缩功能。需要说明的是,在其他实施例中,还可以采用其他类型结构的伸缩组件41,这里不做具体限定,但这些方案均在本发明的保护范围内。
44.请参阅图4至图5,在本发明一个可能的实施例中,还包括第一固定机构6、第一牵引机构7、第二固定机构8以及第二牵引机构9,所述第一固定机构6配置在所述u型管31的第二臂的左内壁底部,所述第一牵引机构7配置在所述设备箱411左侧,所述第一固定机构6的固定端部与所述第一牵引机构7的牵引端部固定连接,所述第二固定机构8配置在所述u型
管31的第二臂的右内壁底部,所述第二牵引机构9配置在所述设备箱411右侧,所述第二固定机构8的固定端部与所述第二牵引机构9的牵引端部固定连接。
45.具体地,在本实施例中,所述第一固定机构6包括第一复位弹簧61、第一固定环62以及第一齿块63,所述第一复位弹簧61配置在所述u型管31的第二臂的左内壁底部,所述第一复位弹簧61的一端与所述u型管31的第二臂内壁邸接,所述第一复位弹簧61的另一端与所述第一齿块63固定连接,所述第一齿块63配置在所述u型管31的第二臂的左内壁底部,所述第一齿块63与连接杆412的第一端部左侧面开设的齿槽4121啮合连接,所述第一固定环62配置在所述第一齿块63与所述u型管31的第二臂内壁相对一侧的中心处。所述第二固定机构8包括第二复位弹簧81、第二固定环82以及第二齿块83,所述第二复位弹簧81配置在所述u型管31的第二臂的右内壁底部,所述第二复位弹簧81的一端与所述u型管31的第二臂内壁邸接,所述第二复位弹簧81的另一端与所述第二齿块83固定连接,所述第二齿块83配置在所述u型管31的第二臂的右内壁底部,所述第二齿块83与连接杆412的第一端部右侧面开设的齿槽4121啮合连接,所述第二固定环82配置在所述第二齿块83与所述u型管31的第二臂内壁相对一侧的中心处。需要说明的是,在其他实施例中,还可以采用其他类型结构的固定机构,这里不做具体限定,但这些方案均在本发明的保护范围内。
46.具体地,在本实施例中,所述第一牵引机构7包括第一收卷盘71、第一拉绳72、第一蜗杆73、第一蜗轮74以及第五伺服电机75,所述第五伺服电机75配置在所述设备箱411的左内壁上,所述第一蜗杆73配置在所述第五伺服电机75的输出轴上,所述第一收卷盘71配置在所述设备箱411的左内壁上,所述第一蜗轮74配置在所述第一收卷盘71的顶端,所述第一蜗杆73与所述第一蜗轮74啮合连接,所述第一拉绳72的一端与所述第一固定环62固定连接,所述第一拉绳72的一端缠绕连接在所述第一收卷盘71上。所述第二牵引机构9包括第二收卷盘91、第二拉绳92、第二蜗杆93、第二蜗轮94以及第六伺服电机95,所述第六伺服电机95配置在所述设备箱411的右内壁上,所述第二蜗杆93配置在所述第六伺服电机95的输出轴上,所述第二收卷盘91配置在所述设备箱411的右内壁上,所述第二蜗轮94配置在所述第二收卷盘91的顶端,所述第二蜗杆93与所述第二蜗轮94啮合连接,所述第二拉绳92的一端与所述第二固定环82固定连接,所述第二拉绳92的一端缠绕连接在所述第二收卷盘91上。需要说明的是,在其他实施例中,还可以采用其他类型结构的牵引机构,这里不做具体限定,但这些方案均在本发明的保护范围内。
47.其中,当感应模块43检测到流水线上的物体时,所述控制器1给所述伺服电机发送启动信号,伺服电机会带动对应的蜗杆转动,蜗杆带动对应蜗轮转动,蜗轮带动对应收卷盘转动,收卷盘对拉绳进行收缩,通过拉绳将对应齿块与所述齿槽4121进行分离,所述伸缩组件41就可进行伸缩操作,确保在移动的过程中连接杆的稳定,避免连接杆向下坠落对夹取物品的冲击。
48.请参阅图6至图7,在本发明一个可能的实施例中,所述抓取组件42包括第四伺服电机421、十字型板422、多个夹取抓手423以及多个电动推杆424,所述第四伺服电机421配置在所述连接杆412的底端,所述十字型板422可转动地配置在所述第四伺服电机421的输出轴底端,所述十字型板422的底端等距开设有四个t型滑槽425,每一所述夹取抓手423可滑动的配置在所述t型滑槽425的内部,所述电动推杆424配置在所述t型滑槽425的槽壁上,所述电动推杆424的伸缩端与所述夹取抓手423的第一面固定连接,所述控制器1的输出端
与所述电动推杆424电气连接。
49.具体地,在本实施例中,当感应模块43检测到流水线上的物体时,所述控制器1给所述第四伺服电机421和每一所述电动推杆424发送启动信号,通过伸缩组件41升降带动所述十字型板422下降,通过所述第四伺服电机421带动所述十字型板422转动,通过所述电动推杆424推动对应的夹取抓手423对流水线物品进行夹取,以实现对流水线物品的精准夹取。其中,所述十字型板422的中心处开设有安装槽,所述感应模块43配置在所述安装槽的内部。需要说明的是,在其他实施例中,还可以采用其他类型结构的抓取组件42,这里不做具体限定,但这些方案均在本发明的保护范围内。
50.在本发明一个可能的实施例中,还包括配置在每一所述夹取抓手423上的防抖动机构44,所述防抖动机构44包括气囊441、气管442、弧形凸起443、连接嘴444以及配置在所述控制箱顶部的气泵445;
51.其中,所述气囊441配置在所述夹取抓手423的第二面,所述弧形凸起443均匀的配置在所述气囊上,所述连接嘴444配置在所述气囊441的边角处,所述气管442配置在所述十字型板422的顶端,所述气管442的一端通过五通阀与所述连接嘴444固定连接,所述气泵445的出气端与气管442的另一端固定连接。
52.具体地,在本实施例中,配置在所述控制箱33顶端的所述气泵445通过所述气管442对每一所述夹取抓手423第二面贴设的所述气囊441进行充气,充气后,所述气囊441的弧形凸起443膨胀,便于将抓取的物品牢固夹紧,避免在抓取放置的过程中物品晃动掉落,影响物品的加工。需要说明的是,在其他实施例中,还可以采用其他类型结构的防抖动机构44,这里不做具体限定,但这些方案均在本发明的保护范围内。
53.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1