一种智能垃圾回收引导机器人的制作方法
1.本发明涉及垃圾回收的技术领域,具体为一种智能垃圾回收引导机器人。
背景技术:
2.垃圾分类,一般是指按一定规定或标准将垃圾分类储存、投放和搬运,从而转变成公共资源的一系列活动的总称,垃圾分类的目的是提高垃圾的资源价值和经济价值,减少垃圾处理量和处理设备的使用,降低处理成本,减少土地资源的消耗,具有社会、经济、生态等几方面的效益,垃圾在分类储存阶段属于公众的私有品,垃圾经公众分类投放后成为公众所在小区或社区的区域性公共资源,垃圾分类搬运到垃圾集中点或转运站后成为没有排除性的公共资源,现有的垃圾分类一般只是通过放置简易的垃圾桶,同时在垃圾桶表面标识不同种类的垃圾,这样的方式不能保证垃圾不会随意放置在错误的垃圾桶中,从而造成垃圾处理的难度增加,同时造成了资源的浪费,现有的垃圾回收不能实现自动引导用户正确进行垃圾分类放置,同时现有的垃圾存储器具不能进行智能检测水分和自动排出湿气。
技术实现要素:
3.为解决上述现有的垃圾分类一般只是通过放置简易的垃圾桶,同时在垃圾桶表面标识不同种类的垃圾,这样的方式不能保证垃圾不会随意放置在错误的垃圾桶中,从而造成垃圾处理的难度增加,同时造成了资源的浪费,现有的垃圾回收不能实现自动引导用户正确进行垃圾分类放置,同时现有的垃圾存储器具不能进行智能检测水分和自动排出湿气的问题,实现以上自动检测、自动提示分类放置、自动传输存储、智能检测水分干燥的目的,本发明通过以下技术方案予以实现:一种智能垃圾回收引导机器人,包括外壳,所述外壳的内部活动连接有分类识别机构,所述分类识别机构包括用于垃圾识别的检测组件、用于垃圾传送回收存储的收集组件,所述检测组件活动连接在外壳的外部,所述收集组件活动连接在外壳的内部,所述检测组件包括载物板、拍摄感知镜头、音响,所述外壳的外部固定连接有载物板,所述外壳的外部固定连接有拍摄感知镜头,所述外壳的外部固定连接有音响,所述收集组件包括放置口、密封盖、弹片、磁筒、线圈、弧形杆、电机一、转轮、传送带、滑落管、储物箱,所述外壳的表面开设有放置口,所述放置口的内侧活动连接有密封盖,所述密封盖的外部固定连接有弹片,所述外壳的内部固定连接有磁筒,所述磁筒的内部滑动连接有线圈,所述线圈的外部固定连接有弧形杆,所述外壳的内部固定连接有电机一,所述电机一的外部固定连接有转轮,所述转轮的外部传动连接有传送带,所述外壳的内部固定连接有滑落管,所述外壳的内部活动连接有储物箱。
4.进一步的,所述外壳的内部活动连接有排出储物箱内部水分的排湿机构,所述排湿机构包括安装壳、滑块、弹绳、连接杆、吸水树脂球、通电触点、通气孔、排气管、电机二、扇叶,所述外壳的内部固定连接有安装壳,所述安装壳的内部滑动连接有滑块,所述滑块的外部固定连接有弹绳,所述弹绳的外部固定连接有连接杆,所述连接杆的外部固定连接有吸水树脂球,所述安装壳的内部固定连接有通电触点,所述储物箱的表面开设有通气孔,所述
外壳的内侧固定连接有排气管,所述排气管的内部连接有电机,所述排气管的内部活动连接有扇叶。
5.进一步的,所述外壳的外部固定连接有启动按钮。
6.进一步的,所述载物板与拍摄感知镜头的位置相对应且规格相匹配,所述音响与外壳的位置相对应且规格相匹配,所述拍摄感知镜头与音响电连接,所述拍摄感知镜头与线圈电连接,所述拍摄感知镜头与电机一电连接,所述密封盖与放置口的位置相对应且规格相匹配,所述弹片的两端分别固定连接在放置口的内侧和密封盖的外部,所述密封盖分为厨余垃圾密封盖、可回收垃圾密封盖、有毒有害垃圾密封盖,所述磁筒与线圈的位置相对应且规格相匹配,所述弧形杆与密封盖的位置相对应且规格相匹配,所述弧形杆与磁筒的位置相对应且规格相匹配。
7.进一步的,所述转轮与放置口的位置相对应且规格相匹配,所述传送带与放置口的位置相对应且规格相匹配,所述传送带与滑落管的位置相对应且规格相匹配,所述滑落管与储物箱的位置相对应且规格相匹配。
8.进一步的,所述滑块与通电触点的位置相对应且规格相匹配,所述弹绳的两端分别固定连接在安装壳的内部和滑块的外部,所述连接杆与安装壳滑动连接,所述吸水树脂球与储物箱的位置相对应且规格相匹配,所述通气孔与储物箱的位置相对应且规格相匹配,所述排气管与储物箱的位置相对应且规格相匹配,所述电机二与扇叶电连接,所述扇叶与排气管的位置相对应且规格相匹配。
9.进一步的,所述启动按钮与拍摄感知镜头电连接,所述线圈、电机一均与启动按钮电连接,所述电机二与通电触点电连接,所述通电触点触发,其内部电流由断路变为通路,进而使得电机二通电运行。
10.本发明提供了一种智能垃圾回收引导机器人。具备以下有益效果:
11.1、该智能垃圾回收引导机器人,通过拍摄感知镜头进行垃圾拍摄自动识别垃圾类型,同时音响提示用户垃圾种类,弧形杆滑动使得密封盖转动打开,进而实现自动分类放置垃圾,转轮转动带动传送带转动进行垃圾运输存储在储物箱的内部,进而实现自动运输垃圾并放置在对应的垃圾储物箱内部,提高了垃圾分类回收的效率和质量,提高了垃圾资源的利用率,降低了垃圾分类的工作量,实现了垃圾回收利用的智能化和便捷化。
12.2、该智能垃圾回收引导机器人,通过吸水树脂球吸收储物箱内部的垃圾产生的水分并使得滑块滑动,滑块滑动触发通电触点,进而实现智能检测储物箱内部的水汽,同时扇叶转动通过通气孔和排气管实现储物箱内部空气和外壳外部空气流动循环,进而实现自动干燥储物箱,有效的防止储物箱存储的垃圾变质,提高了垃圾分类的干净卫生。
附图说明
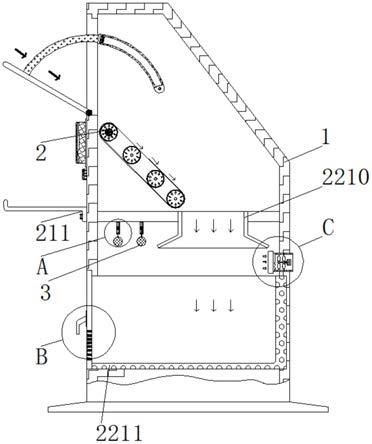
13.图1为本发明内部局部剖视结构示意图;
14.图2为本发明图1中a处结构示意图;
15.图3为本发明图1中b处结构示意图;
16.图4为本发明图1中c处结构示意图;
17.图5为本发明内部侧视结构示意图;
18.图6为本发明分类识别机构连接结构示意图;
19.图7为本发明图6中d处结构示意图;
20.图8为本发明图6中e处结构示意图。
21.图中:1、外壳;2、分类识别机构;21、检测组件;211、载物板;212、拍摄感知镜头;213、音响;22、收集组件;221、放置口;222、密封盖;223、弹片;224、磁筒;225、线圈;226、弧形杆;227、电机一;228、转轮;229、传送带;2210、滑落管;2211、储物箱;3、排湿机构;301、安装壳;302、滑块;303、弹绳;304、连接杆;305、吸水树脂球;306、通电触点;307、通气孔;308、排气管;309、电机二;310、扇叶;4、启动按钮。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.该智能垃圾回收引导机器人的实施例如下:
24.实施例一:
25.请参阅图1-图4,一种智能垃圾回收引导机器人,包括外壳1,外壳1的内部活动连接有分类识别机构2,分类识别机构2包括用于垃圾识别的检测组件21、用于垃圾传送回收存储的收集组件22,检测组件21活动连接在外壳1的外部,收集组件22活动连接在外壳1的内部,检测组件21包括载物板211、拍摄感知镜头212、音响213,外壳1的外部固定连接有载物板211,外壳1的外部固定连接有拍摄感知镜头212,外壳1的外部固定连接有音响213,收集组件22包括放置口221、密封盖222、弹片223、磁筒224、线圈225、弧形杆226、电机一227、转轮228、传送带229、滑落管2210、储物箱2211,外壳1的表面开设有放置口221,放置口221的内侧活动连接有密封盖222,密封盖222的外部固定连接有弹片223,外壳1的内部固定连接有磁筒224,磁筒224的内部滑动连接有线圈225,线圈225的外部固定连接有弧形杆226,外壳1的内部固定连接有电机一227,电机一227的外部固定连接有转轮228,转轮228的外部传动连接有传送带229,外壳1的内部固定连接有滑落管2210,外壳1的内部活动连接有储物箱2211。
26.外壳1的内部活动连接有排出储物箱2211内部水分的排湿机构3,排湿机构3包括安装壳301、滑块302、弹绳303、连接杆304、吸水树脂球305、通电触点306、通气孔307、排气管308、电机二309、扇叶310,外壳1的内部固定连接有安装壳301,安装壳301的内部滑动连接有滑块302,滑块302的外部固定连接有弹绳303,弹绳303的外部固定连接有连接杆304,连接杆304的外部固定连接有吸水树脂球305,安装壳301的内部固定连接有通电触点306,储物箱2211的表面开设有通气孔307,外壳1的内侧固定连接有排气管308,排气管308的内部连接有电机,排气管308的内部活动连接有扇叶310。
27.滑块302与通电触点306的位置相对应且规格相匹配,弹绳303的两端分别固定连接在安装壳301的内部和滑块302的外部,连接杆304与安装壳301滑动连接,吸水树脂球305与储物箱2211的位置相对应且规格相匹配,通气孔307与储物箱2211的位置相对应且规格相匹配,排气管308与储物箱2211的位置相对应且规格相匹配,电机二309与扇叶310电连接,扇叶310与排气管308的位置相对应且规格相匹配。
28.实施例二:
29.请参阅图1-图8,一种智能垃圾回收引导机器人,包括外壳1,外壳1的内部活动连接有分类识别机构2,分类识别机构2包括用于垃圾识别的检测组件21、用于垃圾传送回收存储的收集组件22,检测组件21活动连接在外壳1的外部,收集组件22活动连接在外壳1的内部,检测组件21包括载物板211、拍摄感知镜头212、音响213,外壳1的外部固定连接有载物板211,外壳1的外部固定连接有拍摄感知镜头212,外壳1的外部固定连接有音响213,收集组件22包括放置口221、密封盖222、弹片223、磁筒224、线圈225、弧形杆226、电机一227、转轮228、传送带229、滑落管2210、储物箱2211,外壳1的表面开设有放置口221,放置口221的内侧活动连接有密封盖222,密封盖222的外部固定连接有弹片223,外壳1的内部固定连接有磁筒224,磁筒224的内部滑动连接有线圈225,线圈225的外部固定连接有弧形杆226,外壳1的内部固定连接有电机一227,电机一227的外部固定连接有转轮228,转轮228的外部传动连接有传送带229,外壳1的内部固定连接有滑落管2210,外壳1的内部活动连接有储物箱2211。
30.外壳1的内部活动连接有排出储物箱2211内部水分的排湿机构3,排湿机构3包括安装壳301、滑块302、弹绳303、连接杆304、吸水树脂球305、通电触点306、通气孔307、排气管308、电机二309、扇叶310,外壳1的内部固定连接有安装壳301,安装壳301的内部滑动连接有滑块302,滑块302的外部固定连接有弹绳303,弹绳303的外部固定连接有连接杆304,连接杆304的外部固定连接有吸水树脂球305,安装壳301的内部固定连接有通电触点306,储物箱2211的表面开设有通气孔307,外壳1的内侧固定连接有排气管308,排气管308的内部连接有电机,排气管308的内部活动连接有扇叶310。
31.外壳1的外部固定连接有启动按钮4。
32.载物板211与拍摄感知镜头212的位置相对应且规格相匹配,音响213与外壳1的位置相对应且规格相匹配,拍摄感知镜头212与音响213电连接,拍摄感知镜头212与线圈225电连接,拍摄感知镜头212与电机一227电连接,密封盖222与放置口221的位置相对应且规格相匹配,弹片223的两端分别固定连接在放置口221的内侧和密封盖222的外部,密封盖222分为厨余垃圾密封盖222、可回收垃圾密封盖222、有毒有害垃圾密封盖222,磁筒224与线圈225的位置相对应且规格相匹配,弧形杆226与密封盖222的位置相对应且规格相匹配,弧形杆226与磁筒224的位置相对应且规格相匹配。
33.转轮228与放置口221的位置相对应且规格相匹配,传送带229与放置口221的位置相对应且规格相匹配,传送带229与滑落管2210的位置相对应且规格相匹配,滑落管2210与储物箱2211的位置相对应且规格相匹配。
34.滑块302与通电触点306的位置相对应且规格相匹配,弹绳303的两端分别固定连接在安装壳301的内部和滑块302的外部,连接杆304与安装壳301滑动连接,吸水树脂球305与储物箱2211的位置相对应且规格相匹配,通气孔307与储物箱2211的位置相对应且规格相匹配,排气管308与储物箱2211的位置相对应且规格相匹配,电机二309与扇叶310电连接,扇叶310与排气管308的位置相对应且规格相匹配。
35.启动按钮4与拍摄感知镜头212电连接,线圈225、电机一227均与启动按钮4电连接,电机二309与通电触点306电连接,通电触点306触发,其内部电流由断路变为通路,进而使得电机二309通电运行。
36.在使用时,用户拿取垃圾放置在载物板211并按下启动按钮4,进而使得拍摄感知镜头212通电拍摄载物板211表面的垃圾并按照厨余垃圾、可回收垃圾、有毒有害垃圾进行识别分类,拍摄感知镜头212识别垃圾后使得音响213通电启动提示用户垃圾的种类,同时拍摄感知镜头212使得与用户垃圾种类对应密封盖222内部的线圈225和电机一227通电运行,线圈225通电在磁筒224的磁场中受到安培力的作用下在磁筒224的沿着密封盖222方向滑动,线圈225滑动带动弧形杆226滑动,弧形杆226滑动带动密封盖222逆时针转动,密封盖222转动使得放置口221打开,密封盖222转动使得弹片223形变,放置口221打开,用户将垃圾放入密封盖222的表面垃圾在重力作用下沿着密封盖222滑动直至掉落在传送带229的表面,与此同时电机一227通电运行带动转轮228转动,转轮228转动带动传送带229转动,传送带229转动将垃圾输送到滑落管2210的内侧并掉落在储物箱2211的内部,依次循环,完成垃圾回收,用户再次按下启动按钮4,进而使得拍摄感知镜头212停止通电,同时用户按下启动按钮4,进而使得线圈225、电机一227停止通电,同理线圈225停止通电,密封盖222在弹片223回复力的作用下顺时针转动使得放置口221关闭,同时电机一227停止运行。
37.当储物箱2211内部存储垃圾携带含有大量水分,水分被吸水树脂球305并使得吸水树脂球305体积增加,质量增加在重力作用下带动连接杆304在安装壳301的外部滑动,连接杆304滑动带动滑块302在安装壳301内侧滑动,滑块302滑动带动使得弹绳303伸长,滑块302滑动直至与通电触点306接触,进而使得电机二309通电运行带动扇叶310转动,扇叶310转动使得外壳1内部空气被排出,同时外壳1内部空气被排出产生负压,外壳1外部空气在压强作用下通过通气孔307流入外壳1内部对储物箱2211内部湿气带动通过排气管308排出,从而使得储物箱2211内部水分挥发干燥,同时吸水树脂球305在流动空气作用下内部水分挥发,质量降低,滑块302在弹绳303回复力的作用下滑动并与通电触点306分离,进而使得电机二309停止通电。
38.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1