一种吊车吊臂前端距离探测及画面传输的监控装置的制作方法
1.本发明涉及一种吊车吊臂前端距离探测及画面传输的监控装置
背景技术:
2.吊车是作为协助高空作业的重要设备,一般吊车吊臂可伸长约10米以上,对于大型吊车吊臂伸出长度更可达几十甚至上百米。目前,供电局员工在进行电缆更换、变压器更换以及线路维修过程中,设计人员操作吊车作业过程中,由于吊车操作驾驶室距离吊臂前端距离较长,操作人员无法直接观察到吊臂前端障碍物情况,主要通过辅助人员进行现场指挥。实际作业过程对辅助人员指挥及观察能力要求较高。因此吊车实际作业过程中,经常出现吊车操作人员操作不当或者指挥人员指挥错误,导致吊车吊臂碰撞损坏线路,对吊车操作人员和财产安全产生较大威胁。目前,还没有很好的设备来解决吊车实际操作人员视野受限问题。
3.因此亟需研发一种辅助吊车操作人员判断吊臂前方障碍物距离以及具体画面的辅助监控装置
技术实现要素:
4.为了解决上述吊车操作过程中视野受限问题,本发明提供一种吊车吊臂前端距离探测及画面传输的监控装置。本发明要解决的技术问题:吊车操作过程中障碍物距离判断、操作人员视野受限。
5.为了达到上述目的,本发明所采用的技术方案是提供一种吊车吊臂前端距离探测及画面传输的监控装置,具体包括监控装置箱体、箱体固定夹板、g字夹、电路固定底板、电池挡板、舵机固定l型支架、摄像头平衡l型支架、摄像头平衡控制板、电源稳压模块、陀螺仪、线路连接板、锂电池、单自由度旋转云台、激光雷达舵机、雷达固定l型支架、激光雷达。所述监控装置箱体上侧设置单自由度旋转云台,所述监控装置箱体内部安装电路固定底板,所述电路固定底板上侧布置有摄像头平衡控制板、线路连接板、电源稳压模块,所述监控装置箱体前侧中央固定有摄像头舵机固定l型支架,所述摄像头舵机固定l型支架短边固定摄像头舵机,所述摄像头舵机输出轴处固定舵盘,所述舵盘连接有摄像头平衡l型支架,所述摄像头平衡l型支架一面设置有摄像头,所述摄像头底部设置弹性橡胶垫。
6.此外,作为本发明特别优选的是,还包括监控装置箱体、箱体固定夹板,所述监控装置箱体两侧包括左右俩固定件,所述固定件分别用于将箱体固定夹板采用螺栓连接固定在监控装置箱体两侧,所述箱体固定夹板底面螺栓孔采用沉头孔设计,用于隐藏螺栓头。所述箱体固定夹板两侧小平面采用滚花处理,提高g字夹与箱体固定夹板的夹紧效果,所述g字夹通过夹持箱体固定夹板小平面将监控装置箱体固定在吊车前臂面防护板上,避免监控装置箱体晃动。
7.此外,作为本发明特别优选的是,还包括监控装置箱体,所述监控装置箱体上侧中间开一长方形口,激光雷达舵机固定在单自由度旋转云台下方,单自由度旋转云台固定在
监控装置箱体上侧时激光雷达舵机通过长方形口伸入监控装置箱体内部,降低单自由度旋转云台和激光雷达高度。所述监控装置箱体前面左上角设置一环形开孔,用于安装密封圈以及摄像头舵机线伸入监控装置箱体连接摄像头平衡控制板
8.此外,作为本发明特别优选的是,还包括激光雷达、雷达固定l型支架、单自由度旋转云台,所述加单自由度旋转云台中央圆盘设置有4个阵列分布通孔,用于和雷达固定l型支架长边面螺栓连接,所述雷达固定l型支架长边面与单自由度旋转云台支架设置塑胶隔离圆环柱,用于将雷达固定l型支架抬高一定高度,避免雷达固定l型支架在旋转过程中碰撞单自由度旋转云台上表面凸起螺栓头。雷达固定l型支架长边面与短边面采用加强筋提高强度,采用雷达固定l型支架短边面固定激光雷达,用于使雷达扫描面避开下方监控装置箱体,减小监控装置箱体对雷达距离探测的影响。
9.此外,作为本发明特别优选的是,还包括摄像头舵机固定l型支架,所述摄像头舵机固定l型支架长边面与监控装置箱体前面通过螺栓连接,所述舵机固定支架长边面中间部分开长方形口,用于降低摄像头舵机固定l型支架质量。
10.此外,作为本发明特别优选的是,还包括摄像头平衡l型支架,所述摄像头舵机固定l型支架短边面呈“u”型设计,上下两边各打两个通孔,用于固定摄像头舵机。所述摄像头舵机输出轴固定配套舵盘,所述舵盘与摄像头平衡l型支架短边面固定,所述摄像头平衡l型支架短边面倒角设计。
11.此外,作为本发明特别优选的是,摄像头与摄像头平衡l型支架通过螺栓连接,所述摄像头背部设置有弹性橡胶垫,用于保护摄像头背部电路。
12.此外,作为本发明特别优选的是,还包括电路固定底板,所述电路固定底板为“几”字型设计,电路固定底板左右两侧面与监控装置箱体螺栓连接,电路固定底板中间打两个相距一段距离的通孔,通孔用于在电路固定底板下侧安装长六角隔离柱,所述两个六角隔离柱之间安装锂电池,锂电池下方电池挡板固定在六角隔离柱上,用于将锂电池固定在电路固定底板下侧。电路固定底板上侧设置摄像头平衡控制板、线路连接板、电源稳压模块、陀螺仪。其中电源稳压模块与摄像头平衡控制板固定在电路固定底板中间,两侧固定线路连接板和陀螺仪。
13.与现有技术相比,本发明的有益效果是,提供的一种吊车吊臂前端距离探测及画面传输的监控装置,不仅结构简单,安装快捷,还能够大大解决吊车操作人员在操作室内的视野受限问题,帮助操作人员快速了解吊车吊臂与前方障碍物距离。同时也提高了操作人员的作业效率。
附图说明
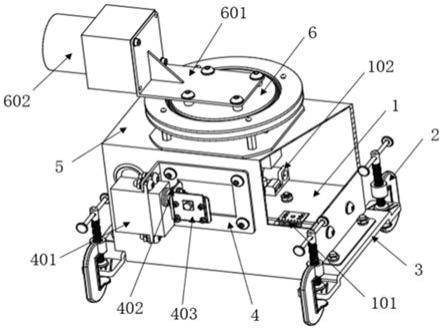
14.图1为本发明最佳施例的结构示意图。
15.图2为本发明最佳施例的监控装置箱体夹持固定结构示意图。
16.图3为本发明最佳施例的电路固定底板连接示意图。
17.图4为本发明最佳施例的摄像头固定结构示意图。
18.图5为本发明最佳施例的激光雷达固定结构示意图
19.标号说明:电路固定底板
…
1、g字夹
…
2、箱体固定夹板
…
3、摄像头舵机固定l型支架
…
4、监控装置箱体
…
5、单自由度旋转云台
…
6、雷达固定l型支架
…
601、激光雷达
…
602、
激光雷达舵机
…
603、塑胶隔离圆环柱
…
604、摄像头舵机
…
401、摄像头平衡l型支架
…
402、摄像头
…
403、舵盘
…
404、线路连接板
…
106、电池挡板
…
105、锂电池
…
104、摄像头平衡控制板
…
103、电源稳压控制板
…
102、陀螺仪
…
101。
具体实施方式
20.本发明实施例中提供的一种吊车吊臂前端距离探测及画面传输的监控装置,适用于吊车作业过程中观察吊车吊臂前方障碍物距离探测以及画面拍摄
21.下面结合具体实施例以及附图,对本发明进行进一步阐述。应理解,所描述的实施例仅用于说明本发明而不用于限制本发明的范围。此外还应理解,在阅读了本发明讲授的内容之后,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,这些等价形式同样落于本技术所附权利要求书所限定的范围。
22.需要说明的是,当组件被称为与另一组件“连接”时,它可以直接与另一组件连接或者也可以存在居中的组件。当组件被称为“设置”另一组件,它可以直接设置有另一组件或者也可以存在居中的组件。当组件被称为“安装”另一组件,它可以直接安装在另一组件或者也可以存在居中的组件。
23.除非另外定义,本发明中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“上”、“下”仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
24.一种吊车吊臂前端距离探测及画面传输的监控装置,如图1-5所示,包括电路固定底板1、g字夹2、箱体固定夹板3、摄像头舵机固定l型支架4、监控装置箱体5、单自由度旋转云台6。所述监控装置箱体5上侧安装有单自由度旋转云台6,所述单自由度旋转云台6上侧连接有雷达固定l型支架601,所述雷达固定l型支架601短边面连接有激光雷达602,所述单自由度旋转云台6下侧安装有激光雷达舵机603,所述单自由度旋转云台6与雷达固定l型支架中间采用塑胶隔离圆环柱抬高
25.所述监控装置箱体5左右两侧面设置有两个固定件,对称分布,左右俩固定件与箱体固定夹板3之间通过螺栓连接,箱体固定夹板3底面打沉头孔,使得连接螺栓头隐藏在沉头孔内,预留底部空间给内部电路接线。箱体固定夹板3两侧设置小平面,小平面采用滚花处理,用于提高g字夹2对固定箱体固定夹板3与吊车前臂面防护板的夹持效果。
26.所述电路固定底板1,包括陀螺仪101、电源稳压模块102、摄像头平衡控制板103、锂电池104、电池挡板105和线路连接板106,所述电池挡板105通过长六角隔离柱固定在电路固定底板1下底面,长六角隔离柱分布在电路固定底板中间,呈对称分布,两个长六角隔离柱之间固定锂电池104,锂电池104被电池挡板105牢牢固定在电路固定底板1的底面上。所述摄像头平衡控制板103和电源稳压模块102安装在电路固定底板1的上ding4面中间上,所述陀螺仪101和线路连接板106分别固定在摄像头平衡控制板103两侧。所述电路固定底板呈现“几”字形,左右两侧面分别打两个通孔,采用螺栓连接固定在监控装置箱体内部。
27.所述摄像头舵机固定l型支架4通过螺栓连接固定在监控装置箱体前侧面,摄像头舵机固定l型支架4长边面中间镂空,降低整体重量。所述摄像头舵机固定l型4支架短边面呈现u型,将摄像头舵机401叉住并采用螺栓固定。所述摄像头舵机401输出轴处舵盘402与摄像头平衡l型支架采用螺栓连接,四颗螺栓为环形间隔分布。所述摄像头平衡l型支架402
与摄像头403采用螺栓连接。所述摄像头403背部黏贴弹性橡胶垫405,用于保护摄像头403背部电路。
28.吊车操作人员使用该发明时,首先完成监控装置箱体5内部摄像头平衡控制板103、摄像头舵机401和陀螺仪101的线路连接以及电源稳压模块102与锂电池104的线路连接,再完成雷达舵机和激光雷达与外部控制电路连接。最后利用g字夹2夹持箱体固定夹板小平面3与吊车前臂面防护板。雷达舵机受电路控制带动雷达固定l型支架601和激光雷达602转动,激光雷达602完成吊车前方障碍物距离探测。同时监控装置箱体5固定在吊车前臂面防护板,在吊车前臂作业过程中监控装置箱体5朝向发生变化,摄像头平衡控制板103根据陀螺仪收集的位置倾角变化,调节舵机输出轴,舵机调整转角保证摄像头视野始终朝向水平。最终吊车操作人员可以根据激光雷达602探测的障碍物距离以及摄像头拍摄的吊车前方画面,辅助完成作业任务。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1