自动式船用锚机刹车装置及其刹车方法与流程
1.本发明涉及一种自动式船用锚机刹车装置及其刹车方法。
背景技术:
2.带式制动器广泛运用于船用锚机、绞车、拖缆机等船用机械设备中。目前,船舶抛锚设备的锚机刹车通常为纯手动操作或纯液压的带式制动器。纯手动操作存在工作人员操作强度大,费时费力,当操作人员的操作速度跟不上自由抛锚时锚链速度,并且一旦船员操作不当,抛锚的速度过快,会发生跳链甚至脱链现象,严重危及船员及船舶的安全;单独的纯液压刹车形式,如果液压系统故障或失效,刹车系统就不能正常使用,影响船舶运行。
3.中国专利cn201810928244.4公开了一种自动式锚机用带式制动器,既包括液压自动刹车也包括手动刹车,具体的,包括上刹车带、下刹车带、刹车片、调节丝杆、拉杆、三角板和刹车操作组件,拉杆一端与上刹车带通过销轴连接,拉杆另一端通过销轴与锚机机座的耳板第一孔连接,下刹车带通过螺母销与调节丝杆一端连接,调节丝杆另一端通过螺母与三角板的第一角连接,三角板的第二角通过销轴与锚机机座的耳板第二孔连接,三角板的第三角通过销轴与刹车操作组件的油缸活塞伸出杆端部连接。
4.上述方案虽然一定程度上保证了锚机在自由抛锚时的速度稳定,减少了对设备的冲击;但是,上述刹车系统仍然存在人工刹车情况,依然存在纯手动操作工作人员操作强度大,费时费力,操作不安全的缺陷;同时,船员在手动操作过程中,操作人员只能凭借经验操作手轮以控制制动器进而控制抛锚速度,无法根据锚机不同负载准确判断需要旋转手轮的圈数以达到准确控制制动器刹车片的松紧以达到准确刹车的目的;同样,上述专利也未明确油缸调节油压的具体方式,油缸也无法根据锚机不同负载准确调整活塞杆的伸出量以实现准确刹车。
技术实现要素:
5.本发明所要解决的技术问题是:提供一种自动式船用锚机刹车装置。
6.为解决上述技术问题,本发明所采用的技术方案为:一种自动式船用锚机刹车装置,包括安装在锚机机座上的伺服刹车机构,伺服刹车机构包括伺服电机以及由伺服电机驱动旋转的伺服刹车机构输出轴;
7.锚机机座上设有竖向设置的丝杠;伺服刹车机构输出轴下端与丝杠上端连接;锚绞机机座上设有固定板,活动杆一端通过销轴与固定板铰接,活动杆另一端设有供丝杠下端穿过的螺纹滑套,竖直向上布置的行程可控的液压油缸下端通过销轴活动连接于活动杆上位于丝杠和固定板中间位置;液压油缸的活塞伸出杆端部通过可插拔的销轴一与制动杆的一端铰接;液压油缸的缸体侧壁上设置有连接块,连接块上设有平行于销轴一的可插拔的销轴二,销轴二与制动杆上设置的第二孔活动连接;
8.锚机机座上设有三角座,制动杆的另一端部铰接在三角座顶端;锚链轮上设有转速传感器,锚链上设有拉力测量仪,刹车带包括包覆在锚链轮上的支撑带和设置在支撑带
内侧面上的刹车片,刹车带绕入端通过紧边销轴与三角座下部相铰接,刹车带绕出端通过螺母销与调节丝杆的一端连接;制动杆上设有限位座,限位座中设有沿制动杆长度方向设置的供调节丝杆穿出的通孔,调节丝杆穿出限位座的端部上套设有用以拉紧刹车带的锁紧螺母;
9.液压油缸进油管路及出油管路上设置有流量计以及流量控制阀,液压油缸的进液管上设有压力传感器;液压油缸包括与活动杆中间部分铰接的端盖、缸筒组件、活塞、活塞杆和蝶簧,端盖上设有进出油孔,活塞将缸筒组件内分为无杆腔和有杆腔,蝶簧置于有杆腔内并套设在活塞杆上,活塞杆伸出缸筒组件的端部设置有杆头,杆头与制动杆连接;活塞杆与缸体接触面上设有密封件。
10.优选的,所述制动杆上设有第一插拔气缸和第二插拔气缸,第一插拔气缸的活塞杆端部与销轴一相连接,第二插拔气缸的活塞杆端部与销轴二相连接。
11.优选的,所述伺服电机竖直向下布置,伺服电机通过电机安装支架与锚机机座固定连接,伺服电机输出轴连接驱动齿轮,驱动齿轮与设置在电机安装支架上的伺服刹车机构输出轴上的从动齿轮啮合。
12.优选的,所述蝶簧与所述油缸内壁之间设置有隔套。
13.优选的,所述蝶簧上远离所述活塞的一端设置挡板。
14.本发明所要解决的另一个技术问题是:提供一种上述自动式船用锚机刹车装置的刹车方。
15.为解决上述技术问题,本发明所采用的技术方案为:上述自动式船用锚机刹车装置的刹车方法,包括正常情况下的液压自动刹车,以及液压系统失效时的伺服自动刹车;
16.当液压油缸的进液管上设置的压力传感器检测值与设定值不一致时,判定为液压系统失效;销轴二插入销轴孔,同时控制销轴一脱开销轴孔,伺服自动刹车机构开始工作;
17.伺服自动刹车过程为:中央控制单元储存根据实时传输的负载数据及伺服电机需要驱动驱动齿轮转动圈数n2与外部负载f之间的函数关系式实时计算出完成刹车伺服电机所需要驱动驱动齿轮转动的圈数n2,一旦测得的锚链轮转动速度即锚链释放速度大于设定极限速度v0时,中央控制单元即发送刹车信号及数据n2给伺服电机,伺服电机收到刹车信号和数据信号后驱动驱动齿轮转动的圈数n2,完成刹车动作;
18.其中计算伺服电机需要驱动驱动齿轮转动圈数n2与外部负载f之间的函数关系式的具体步骤为:
19.1.1、设从动齿轮转动n1圈,可以完成外部负载为f(kn)时的刹车制动;计算活动杆远端上升的距离:s1=n1s
导
,式中,s
导
(mm)为丝杠导程;
20.1.2、计算油缸上升的距离:
21.1.3、计算活动杆转过的角度近似为:
22.式中,β1为活动杆刹车过程中绕固定板铰接点o1的旋转角度(rad),系统制动前β1>0(rad),系统完成制动后β1=0;d(mm)为活动杆与固定板铰接点及丝杠铰接点间距离的一半;
23.1.4、计算调节丝杆ef旋转的角度β
11
:
24.其中c(mm)为制动杆上活塞杆铰接点与三角座铰接点之间的长度;
25.1.5、计算调节丝杆ef与刹车带连接点移动距离的近似值:
[0026][0027]
式中,l1(mm)表示调节丝杆上与刹车带连接点及与限位座连接点间的长度;
[0028]
1.6、计算刹车前后刹车带与刹车轮贴合的弧长变化:
△
s2=rα-(r+a)α1;
[0029]
式中,a为刹车带调整间隙(mm),r为刹车轮半径(mm),α为刹车带刹紧时的制动包角(rad),刹车带松开时的包角为α1;
[0030]
1.7、计算刹车轮制动圆周力:
[0031]
式中,f
支
为刹车轮支持负载(kn),d
l
为刹车轮节圆直径(mm);
[0032]
1.8、刹车带的绕出端张力:
[0033]
式中,μ为刹车片材料摩擦系数,e为自然对数底数(e=2.718);
[0034]
1.9、求出刹紧时制动包角α:
[0035]
1.10、计算刹车前后刹车带与刹车轮贴合的弧长变化:
[0036][0037]
1.11、计算刹车前后刹车带与刹车轮贴合的弧长变化
△
s2近似为调节丝杆与刹车带连接点移动的距离
△
s1:
[0038][0039]
1.12、计算当外部负载为f时,刹车带的绕出端张力f2:
[0040]
1.13、得出完成刹车从动齿轮所需要转动圈数n1与外部负载f之间的关系:
[0041][0042]
1.13、伺服电机输出轴驱动齿轮齿数为z2,从动齿轮齿数为z1,从动齿轮转动n1圈
数时,伺服电机需要驱动驱动齿轮转动n2圈,其中:
[0043]
1.14、得出完成刹车伺服电机需要驱动驱动齿轮转动圈数n2与外部负载f之间的关系:
[0044]
液压自动刹车具体调节过程为:
[0045]
中央控制单元通过液压油缸活塞杆的缩回长度
△
l2与外部负载为f之间的函数关系式以及实时传输的负载数据,实时计算出液压油缸活塞杆的缩回长度
△
l2;一旦测得的锚链轮转动速度即锚链释放速度大于极限速度v0时,中央控制单元即发送刹车信号及油量、油压数据给流量控制阀,流量控制阀收到刹车信号和数据信号后调节液压油缸3的进出油量以控制活塞的位置,从而准确调节刹车装置制动力的大小,实现抛锚过程中的动态刹车;
[0046]
设外部负载为f(kn)时,未刹车状态下油缸活塞杆的伸出量为
△
l2(mm),
△
l2为完成刹车活塞杆需要缩回的长度,l2(mm)为油缸活塞杆未伸出时油缸整体长度;
[0047]
其中,液压油缸活塞杆的缩回长度
△
l2与外部负载为f之间的函数关系式计算的具体步骤为:
[0048]
2.1、计算油缸活塞杆的伸出长度
△
l2:
[0049]
等效为以o2为圆心,c为半径(mm),角度为β2对应的弧长:
△
l2=cβ2;
[0050]
式中,β2为活动杆刹车过程中绕固定板铰接点o1的旋转角度(rad),系统制动前β2>0(rad),系统完成制动后β2=0;
[0051]
2.2、计算调节丝杆f端移动的距离:
[0052]
式中,l1(mm)表示调节丝杆ef长度;
[0053]
2.3、计算刹车前后刹车带与锚链轮贴合的弧长变化:
△
s2=rα-(r+a)α1;
[0054]
式中,a为刹车带调整间隙(mm),r为锚链轮半径(mm),α为刹紧时的刹车带制动包角(rad),刹车带松开时为α1,α>α1;
[0055]
2.4、计算刹车前后刹车带与锚链轮贴合的弧长变化:
[0056][0057]
2.5、刹车前后刹车带与锚链轮贴合的弧长变化
△
s2近似为调节丝杆f端移动的距离
△
s1,可得:
[0058]
2.6、计算外部负载为f时,刹车带的绕出端张力f2:
[0059]
2.7、得出液压油缸活塞杆的缩回长度
△
l2与外部负载为f之间的关系:
[0060][0061]
本发明的有益效果是:
[0062]
1、本发明一种自动式船用锚机刹车装置,包括液压自动刹车与伺服自动刹车两种刹车模式,当速度测量单元测得的锚链轮转动速度即锚链释放速度大于极限速度v0时,中央控制单元控制刹车装置自动启动刹车装置进行刹车,实现了锚机抛锚的自动刹车,使得锚机抛锚速度变得可控。
[0063]
正常情况下系统使用液压自动刹车模式,当刹车过程中发生如液压油不够、油路损坏等意外情况,造成液压系统失效时,系统可迅速自动切换至伺服自动刹车模式,作为作为应急使用。抛锚速度稳定,运行平稳,实现锚机的安全、平稳、高效的抛锚,对设备冲击较小,改善了船员的作业环境,克服了现有技术中纯手动操作工作人员操作强度大,费时费力,操作不安全的缺陷。
[0064]
2、本发明提供了一种自动式船用锚机刹车装置具体调节方式,刹车系统可以根据锚机不同负载f准确判断完成刹车伺服电机需要驱动驱动齿轮转动的圈数n2,以达到准确控制制动器刹车片的松紧以达到准确刹车的目的;同样,液压自动刹车过程中,液压油缸也可以根据锚机不同负载准确自动调整活塞杆的伸出量以控制制动器刹车片的松紧以达到准确刹车的目的。
[0065]
3、本发明一种自动式船用锚机刹车装置,通过流量控制阀调节液压油缸打开时压力,可以准确调节刹车装置制动力的大小,从而实现抛锚过程中的动态刹车,控制灵敏度高,安全可靠,调试简便,克服了现有技术中纯手动操作工作人员操作误差大,不能准确刹车的缺陷。
[0066]
4、本发明一种自动式船用锚机刹车装置,在刹车片磨损变薄后,可以通过调整锁紧螺母的位置,调整调节丝杆的长度,从而可以调整刹车片与锚链轮之间的间隙,解决了由于摩擦片磨损使得摩擦片与锚链轮之间的间隙越来越大,导致的制动时间越来越长、制动器的灵敏度降低的问题。
附图说明
[0067]
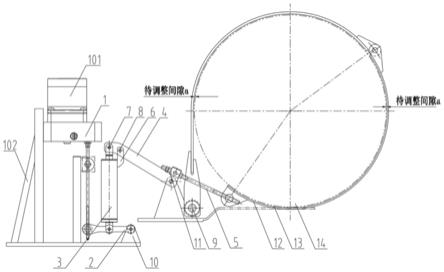
图1为本发明实施例中自动式船用锚机刹车装置结构示意图。
[0068]
图2为本发明实施例中伺服刹车机构结构示意图。
[0069]
图3为本发明实施例中自动式船用锚机刹车装置液压油缸结构示意图。
[0070]
图4为图3的b向结构示意图。
[0071]
图5为本发明实施例中液压油缸蝶簧受力示意图。
[0072]
图6为本发明实施例中刹车装置伺服自动刹车示意图。
[0073]
图7为本发明实施例中刹车装置液压自动刹车示意图。
[0074]
附图中:
[0075]
1、伺服刹车机构
ꢀꢀꢀꢀꢀꢀ
101、伺服电机
ꢀꢀꢀꢀꢀꢀꢀꢀ
102、电机安装支架
[0076]
103、驱动齿轮
ꢀꢀꢀꢀꢀꢀꢀꢀ
104、从动齿轮
[0077]
2、活动杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3、液压油缸
[0078]
4、制动杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5、调节丝杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6、连接块
[0079]
7、销轴一
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8、销轴二
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
9、紧边销轴
[0080]
10、固定板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11、锁紧螺母
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12、支撑带
[0081]
13、刹车片
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14、锚链轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
15、端盖
[0082]
16、缸筒组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
17、活塞
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
18、隔套
[0083]
19、活塞杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20、蝶簧
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21、挡板
[0084]
22、密封件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23、杆头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24、无杆腔
[0085]
25、有杆腔
具体实施方式
[0086]
下面结合附图,详细描述本发明的具体实施方案。
[0087]
如图1-5所示,一种自动式船用锚机刹车装置,包括安装在锚机机座上的伺服刹车机构1,伺服刹车机构1包括伺服电机101以及由伺服电机101驱动旋转的伺服刹车机构输出轴;伺服电机101竖直向下布置,伺服电机101通过电机安装支架102与锚机机座固定连接,伺服电机101输出轴连接驱动齿轮103,驱动齿轮103与设置在电机安装支架102上的伺服刹车机构输出轴上的从动齿轮104啮合,锚机机座上设有竖向设置的丝杠;伺服刹车机构输出轴下端与丝杠上端连接;
[0088]
锚绞机机座上设有固定板10,活动杆2一端通过销轴与固定板10铰接,活动杆2另一端设有供丝杠下端穿过的螺纹滑套,竖直向上布置的行程可控的液压油缸3下端通过销轴活动连接于活动杆2上位于丝杠和固定板10中间位置。
[0089]
液压油缸3的活塞伸出杆端部通过销轴一7与制动杆4的一端铰接;液压油缸3的缸体侧壁上设置有连接块6,连接块6上设有平行于销轴一的可调的销轴二8,销轴二8与制动杆4上设置的第二孔活动连接。
[0090]
制动杆上设有第一插拔气缸和第二插拔气缸,第一插拔气缸的活塞杆端部与销轴一7相连接,第二插拔气缸的活塞杆端部与销轴二8相连接。
[0091]
锚机机座上设有三角座,制动杆4的另一端部铰接在三角座顶端,锚链轮14上设有转速传感器,锚链上设有拉力测量仪,刹车带包括包覆在锚链轮14上的支撑带12和设置在支撑带12内侧面上的刹车片13,刹车带绕入端通过紧边销轴9与三角座下部相铰接,刹车带绕出端通过螺母销与调节丝杆5的一端连接。制动杆上设有限位座,限位座中设有沿制动杆4长度方向设置的供调节丝杆5穿出的通孔,调节丝杆5穿出限位座的端部上套设有用以拉紧刹车带的锁紧螺母11;
[0092]
液压油缸3进油管路及出油管路上设置有流量计以及流量控制阀,液压油缸3的进液管上设有压力传感器,液压油缸3包括与活动杆2中间部分铰接的端盖15、缸筒组件16、活塞17、活塞杆19和蝶簧20,端盖15上设有进出油孔,活塞17将缸筒组件16内分为无杆腔24和有杆腔25,蝶簧20设置于有杆腔25内并套设在活塞杆19上,蝶簧20与油缸内壁之间设置有
隔套18,蝶簧20上远离活塞17的一端设置挡板21,活塞杆19伸出缸筒组件16的端部设置有杆头23,杆头23与制动杆4连接;活塞杆19与缸体接触面上设有密封件22。
[0093]
上述自动式船用锚机刹车装置的刹车方法,包括正常情况下的液压自动刹车,以及液压系统失效时的伺服自动刹车;
[0094]
当液压油缸3的进液管上设置的压力传感器检测值与设定值不一致时,判定为液压系统失效;销轴二8插入销轴孔,同时控制销轴一7脱开销轴孔,伺服自动刹车机构开始工作;
[0095]
如图6所示,伺服自动刹车过程为:中央控制单元储存根据实时传输的负载数据及伺服电机需要驱动驱动齿轮转动圈数n2与外部负载f之间的函数关系式实时计算出完成刹车伺服电机所需要驱动驱动齿轮转动的圈数n2,一旦测得的锚链轮转动速度即锚链释放速度大于设定极限速度v0时,中央控制单元即发送刹车信号及数据n2给伺服电机,伺服电机收到刹车信号和数据信号后驱动驱动齿轮转动的圈数n2,完成刹车动作;
[0096]
其中计算伺服电机需要驱动驱动齿轮转动圈数n2与外部负载f之间的函数关系式的具体步骤为:
[0097]
1.1、设从动齿轮转动n1圈,可以完成外部负载为f(kn)时的刹车制动;计算活动杆远端上升的距离:s1=n1s
导
,式中,s
导
(mm)为丝杠导程;
[0098]
1.2、计算油缸上升的距离:
[0099]
1.3、计算活动杆转过的角度近似为:
[0100]
式中,β1为活动杆刹车过程中绕固定板铰接点o1的旋转角度(rad),系统制动前β1>0(rad),系统完成制动后β1=0;d(mm)为活动杆与固定板铰接点及丝杠铰接点间距离的一半;
[0101]
1.4、计算调节丝杆ef旋转的角度β
11
:
[0102]
其中c(mm)为制动杆上活塞杆铰接点与三角座铰接点之间的长度;
[0103]
1.5、计算调节丝杆ef与刹车带连接点移动距离的近似值:
[0104][0105]
式中,l1(mm)表示调节丝杆上与刹车带连接点及与限位座连接点间的长度;
[0106]
1.6、计算刹车前后刹车带与刹车轮贴合的弧长变化:
△
s2=rα-(r+a)α1;
[0107]
式中,a为刹车带调整间隙(mm),r为刹车轮半径(mm),α为刹车带刹紧时的制动包角(rad),刹车带松开时的包角为α1;
[0108]
1.7、计算刹车轮制动圆周力:
[0109]
式中,f
支
为刹车轮支持负载(kn),d
l
为刹车轮节圆直径(mm);
[0110]
1.8、刹车带的绕出端张力:
[0111]
式中,μ为刹车片材料摩擦系数,e为自然对数底数(e=2.718);
[0112]
1.9、求出刹紧时制动包角α:
[0113]
1.10、计算刹车前后刹车带与刹车轮贴合的弧长变化:
[0114][0115]
1.11、计算刹车前后刹车带与刹车轮贴合的弧长变化
△
s2近似为调节丝杆与刹车带连接点移动的距离
△
s1:
[0116][0117]
1.12、计算当外部负载为f时,刹车带的绕出端张力f2:
[0118]
1.13、得出完成刹车从动齿轮所需要转动圈数n1与外部负载f之间的关系:
[0119][0120]
1.13、伺服电机输出轴驱动齿轮齿数为z2,从动齿轮齿数为z1,从动齿轮转动n1圈数时,伺服电机需要驱动驱动齿轮转动n2圈,其中:
[0121]
1.14、得出完成刹车伺服电机需要驱动驱动齿轮转动圈数n2与外部负载f之间的关系:
[0122]
如图7所示,液压自动刹车具体调节过程为:
[0123]
中央控制单元通过液压油缸活塞杆的缩回长度
△
l2与外部负载为f之间的函数关系式以及实时传输的负载数据,实时计算出液压油缸活塞杆的缩回长度
△
l2;一旦测得的锚链轮转动速度即锚链释放速度大于极限速度v0时,中央控制单元即发送刹车信号及油量、油压数据给流量控制阀,流量控制阀收到刹车信号和数据信号后调节液压油缸3的进出油量以控制活塞的位置,从而准确调节刹车装置制动力的大小,实现抛锚过程中的动态刹车;
[0124]
设外部负载为f(kn)时,未刹车状态下油缸活塞杆的伸出量为
△
l2(mm),
△
l2为完成刹车活塞杆需要缩回的长度,l2(mm)为油缸活塞杆未伸出时油缸整体长度;
[0125]
其中,液压油缸活塞杆的缩回长度
△
l2与外部负载为f之间的函数关系式计算的具体步骤为:
[0126]
2.1、计算油缸活塞杆的伸出长度
△
l2:
[0127]
等效为以o2为圆心,c为半径(mm),角度为β2对应的弧长:
△
l2=cβ2;
[0128]
式中,β2为活动杆刹车过程中绕固定板铰接点o1的旋转角度(rad),系统制动前β2>0(rad),系统完成制动后β2=0;
[0129]
2.2、计算调节丝杆f端移动的距离:
[0130]
式中,l1(mm)表示调节丝杆ef长度;
[0131]
2.3、计算刹车前后刹车带与锚链轮贴合的弧长变化:
△
s2=rα-(r+a)α1;
[0132]
式中,a为刹车带调整间隙(mm),r为锚链轮半径(mm),α为刹紧时的刹车带制动包角(rad),刹车带松开时为α1,α>α1;
[0133]
2.4、计算刹车前后刹车带与锚链轮贴合的弧长变化:
[0134][0135]
2.5、刹车前后刹车带与锚链轮贴合的弧长变化
△
s2近似为调节丝杆f端移动的距离
△
s1,可得:
[0136]
2.6、计算外部负载为f时,刹车带的绕出端张力f2:
[0137]
2.7、得出液压油缸活塞杆的缩回长度
△
l2与外部负载为f之间的关系:
[0138][0139]
上述的实施例仅例示性说明本发明创造的原理及其功效,以及部分运用的实施例,而非用于限制本发明;应当指出,对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1