一种模块化探测器的辅助安装工装的制作方法
1.本技术涉及辅助工装技术领域,具体涉及一种模块化探测器的辅助安装工装。
背景技术:
2.衍射探测器通常采用模块化设计,该模块化的衍射探测器一般由多个探测单元组成,同时,该模块化衍射探测器的高度较高,且各探测单元的质量较重,在安装时,通常都是采用人工进行安装的,费时费力,且安装效率低。
技术实现要素:
3.本技术旨在提供一种模块化探测器的辅助安装工装,以提高模块化衍射探测器的安装效率。
4.本技术提供了一种模块化探测器的辅助安装工装,包括:
5.升降机构,所述升降机构包括:升降平台,剪叉式升降组件,以及升降驱动组件,所述剪叉式升降组件用于输出上下方向的往复运动;所述升降驱动组件与所述剪叉式升降组件传动连接,用于为所述剪叉式升降组件提供动力;
6.翻转机构,所述翻转机构包括:翻转平台,以及翻转驱动组件;所述翻转平台的一侧铰接在所述升降平台上,以使所述翻转平台可绕其一侧翻转;所述翻转驱动组件安装在所述升降平台上,且所述翻转驱动组件的动力输出端与所述翻转平台连接,用于为所述翻转平台的翻转提供动力。
7.进一步地,所述剪叉式升降组件包括:底板,以及剪叉单元;所述剪叉单元包括:第一剪叉臂和第二剪叉臂,所述第一剪叉臂的中部与所述第二剪叉臂的中部铰接;所述第一剪叉臂的顶端以及所述第二剪叉臂的顶端均与所述升降平台的底面铰接,所述第一剪叉臂的底端和/或所述第二剪叉臂的底端均可滑动的设置在所述底板上;所述升降驱动组件与所述第一剪叉臂和/或所述第二剪叉臂传动连接。
8.进一步地,所述剪叉单元设置有多层,最顶层所述剪叉单元中的所述第一剪叉臂的顶端以及所述第二剪叉臂的顶端均与所述升降平台的底面铰接,最底层所述剪叉单元中的所述第一剪叉臂的底端和/或所述第二剪叉臂的底端均可滑动的设置在所述底板上,相邻两个所述剪叉单元中,上层所述剪叉单元中的所述第一剪叉臂的底端与下层剪叉单元中的所述第二剪叉臂的顶端之间铰接,上层所述剪叉单元中的所述第二剪叉臂的底端与下层剪叉单元中的所述第二剪叉臂的顶端之间铰接;所述升降驱动组件与最底层所述剪叉单元的第一剪叉臂和/或第二剪叉臂传动连接。
9.进一步地,所述升降驱动组件包括:直线导轨,至少一个滑块,以及升降动力单元;最底层所述剪叉单元中的所述第一剪叉臂的底端或所述第二剪叉臂的底端安装在所述滑块上,所述直线导轨设置在所述底板上,所述滑块可滑动的设置在所述直线导轨上,所述升降动力单元用于驱动所述滑块沿所述直线导轨的长度方向往复滑动。
10.进一步地,所述升降动力单元包括:丝杠,丝杠螺母,以及手轮,所述丝杠安装在所
述底板上,所述丝杠螺母螺接在所述丝杠上,且所述丝杠螺母与所述滑块固定连接,所述丝杠的长度方向相同于所述直线导轨的长度方向,所述手轮与所述丝杠的一端连接。
11.进一步地,所述升降动力单元包括:升降驱动缸,所述升降驱动缸的活塞杆的端部与所述滑块连接。
12.进一步地,所述翻转平台绕其一侧翻转的角度范围为0
°
~35
°
。
13.进一步地,所述翻转驱动组件为翻转驱动缸,所述翻转驱动缸的活塞杆的端部与所述翻转平台的底面铰接。
14.进一步地,所述升降机构还包括:多个滚轮,所述多个滚轮矩形阵列在所述底板的底部。
15.进一步地,所述滚轮为万向轮。
16.依据本技术所提供的模块化探测器的辅助安装工装,在实际安装模块化探测器的过程中,将探测单元放置在翻转机构上,通过升降机构带动探测单元上升,上升到位后,通过翻转机构将其倾斜一定角度,以安装到支架上所设置的安装组件上,如此,不仅以提高探测单元的安装效率,还可提升整体模块化探测器的组装效率。
附图说明
17.图1为本技术提供的模块化探测器的辅助安装工装的主视图;
18.图2为本技术提供的模块化探测器的辅助安装工装的左视图;
19.图3为本技术提供的模块化探测器的辅助安装工装中的升降机构的结构示意图。
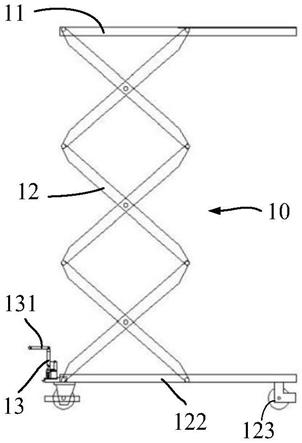
具体实施方式
20.下面通过具体实施方式结合附图对本发明作进一步详细说明。其中不同实施方式中类似元件采用了相关联的类似的元件标号。在以下的实施方式中,很多细节描述是为了使得本技术能被更好的理解。然而,本领域技术人员可以毫不费力的认识到,其中部分特征在不同情况下是可以省略的,或者可以由其他元件、材料、方法所替代。在某些情况下,本技术相关的一些操作并没有在说明书中显示或者描述,这是为了避免本技术的核心部分被过多的描述所淹没,而对于本领域技术人员而言,详细描述这些相关操作并不是必要的,他们根据说明书中的描述以及本领域的一般技术知识即可完整了解相关操作。
21.另外,说明书中所描述的特点、操作或者特征可以以任意适当的方式结合形成各种实施方式。同时,方法描述中的各步骤或者动作也可以按照本领域技术人员所能显而易见的方式进行顺序调换或调整。因此,说明书和附图中的各种顺序只是为了清楚描述某一个实施例,并不意味着是必须的顺序,除非另有说明其中某个顺序是必须遵循的。
22.本文中为部件所编序号本身,例如“第一”、“第二”等,仅用于区分所描述的对象,不具有任何顺序或技术含义。而本技术所说“连接”、“联接”,如无特别说明,均包括直接和间接连接(联接)。
23.参见图1至图3所示,本实施例提供的模块化探测器的辅助安装工装主要包括:升降机构10和翻转机构20,翻转机构20安装在升降机构10上,升降机构10可输出竖直方向上的往复运动,以带动翻转机构20上升或下降。翻转机构20可相对于升降机构10进行翻转。在实际安装模块化探测器的过程中,将探测单元放置在翻转机构20上,通过升降机构10带动
探测单元上升,上升到位后,通过翻转机构20将其倾斜一定角度,以安装到支架上所设置的安装组件上,如此,不仅以提高探测单元的安装效率,还可提升整体模块化探测器的组装效率。
24.升降机构10包括:升降平台11,剪叉式升降组件12,以及升降驱动组件13,剪叉式升降组件12用于输出上下方向的往复运动,升降驱动组件13与剪叉式升降组件12传动连接,该升降驱动组件13用于为剪叉式升降组件12提供动力,以使其可输出上下方向的往复运动,进而带动升降平台11上升或下降。
25.翻转机构20包括:翻转平台21,以及翻转驱动组件22。翻转平台21的一侧铰接在升降平台11上,从而使得该翻转平台21可绕其一侧翻转,即该翻转平台21的另一侧可绕该翻转平台21铰接在升降平台11上的一侧相对于升降平台11进行翻转。翻转驱动组件22安装在升降平台11上,并且,该翻转驱动组件22的动力输出端与翻转平台21连接,该翻转驱动组件22用于为翻转平台21的另一侧可绕该翻转平台21铰接在升降平台11上的一侧相对于升降平台11进行翻转的过程提供动力。
26.一种实施例中,翻转平台21的另一侧可绕该翻转平台21铰接在升降平台11上的一侧相对于升降平台11进行翻转时,翻转平台21与升降平台11之间夹角在0
°
~35
°
范围内,优选的实施方式中,该夹角在0
°
~30
°
。当然,在其他实施例中,该角度也可以是其他角度范围,以能够满足将探测单元安装到位为准。
27.本技术中,翻转驱动组件22为翻转驱动缸,该翻转驱动缸的缸体铰接安装在升降平台11上,该翻转驱动缸的活塞杆的端部与翻转平台21的底面铰接连接,从而,通过翻转驱动缸的活塞杆做活塞运动而驱动翻转平台21进行翻转。
28.如图3所示,前述的剪叉式升降组件12包括:底板122,以及剪叉单元121;剪叉单元1212包括:第一剪叉臂1211和第二剪叉臂1212,第一剪叉臂1211的中部与第二剪叉臂1212的中部铰接,第一剪叉臂1211的顶端以及第二剪叉臂1212的顶端均与升降平台11的底面铰接。
29.一种实施方式中,第一剪叉臂1211的底端和第二剪叉臂1212的底端均可滑动的设置在底板122上,升降驱动组件13则与第一剪叉臂1211和第二剪叉臂1212都传动连接,以通过升降驱动组件13驱动第一剪叉臂1211和第二剪叉臂1212相互靠拢或分开,从而带动升降平台11上升或下降。
30.另一种实施方式中,第一剪叉臂1211的底端或者第二剪叉臂1212的底端可滑动的设置在底板122上。升降驱动组件13则与第一剪叉臂1211或者第二剪叉臂1212传动连接,一种情况下,升降驱动组件13驱动第一剪叉臂1211向朝向第二剪叉臂1212的方向移动、以靠拢至第二剪叉臂1212,或者,驱动第一剪叉臂1211向远离第二剪叉臂1212的方向移动、以与第二剪叉臂1212分开,从而带动升降平台11上升或者下降。另一种情况下,升降驱动组件13驱动第二剪叉臂1212向朝向第一剪叉臂1211的方向移动、以靠拢至第一剪叉臂1211,或者,驱动第二剪叉臂1212向远离第一剪叉臂1211的方向移动、以与第一剪叉臂1211分开,从而带动升降平台11上升或者下降。
31.本实施例中,前述的升降机构10能够带动升降平台11上升至2.5m~3m的高度,而为了满足该高度要求,前述的剪叉单元121则需要设置多层,升降平台11连接在最顶层的剪叉单元121上,最顶层剪叉单元121中的第一剪叉臂1211的顶端以及第二剪叉臂1212的顶端
均与升降平台11的底面铰接,最底层剪叉单元121中的第一剪叉臂1211的底端和/或第二剪叉臂1212的底端均可滑动的设置在底板122上,相邻两个剪叉单元121中,上层剪叉单元121中的第一剪叉臂1211的底端与下层剪叉单元121中的第二剪叉臂1212的顶端之间铰接,上层剪叉单元121中的第二剪叉臂1212的底端与下层剪叉单元121中的第二剪叉臂1212的顶端之间铰接。升降驱动组件13则与最底层剪叉单元121的第一剪叉臂1211和/或第二剪叉臂1212传动连接。
32.本实施例中,剪叉单元121具体是设置有三层。
33.一种实施例中,前述的升降驱动组件13包括:直线导轨(图中未示出),至少一个滑块(图中未示出),以及升降动力单元,最底层剪叉单元121中的第一剪叉臂1211的底端和/或第二剪叉臂1212的底端安装在滑块上,直线导轨则安装在底板122上,滑块可滑动的设置在该直线导轨上,升降动力单元用于驱动滑块沿直线导轨的长度方向往复滑动,从而带动第一剪叉臂1211向朝向第二剪叉臂1212的方向移动、以靠拢至第二剪叉臂1212,或者,带动第一剪叉臂1211向远离第二剪叉臂1212的方向移动、以与第二剪叉臂1212分开,从而带动升降平台11上升或者下降,或者,带动升降驱动组件13驱动第二剪叉臂1212向朝向第一剪叉臂1211的方向移动、以靠拢至第一剪叉臂1211,或者,带动第二剪叉臂1212向远离第一剪叉臂1211的方向移动、以与第一剪叉臂1211分开,从而带动升降平台11上升或者下降。
34.升降动力单元包括:丝杠,丝杠螺母,以及手轮131,丝杠安装在底板122上,丝杠螺母螺接在所述丝杠上,且丝杠螺母与前述的滑块固定连接,丝杠的长度方向相同于直线导轨的长度方向,手轮131则与丝杠的一端连接,通过转动手轮131,从而带动丝杠绕其轴心线转动,丝杠螺母则将转动运动转化为直线运动,从而带动滑块移动,以通过剪叉单元121带动。
35.另一种实施例中,前述的升降动力单元也可以包括:升降驱动缸,该升降驱动缸的活塞杆的端部与前述的滑块连接,同样能够带动滑块沿直线导轨的长度方向往复滑动。
36.本技术中,在底板122的底部还矩形阵列有多个滚轮123,以便于移动本工装,该滚轮优选采用万向轮。
37.综上所述,本实施例所提供的模块化探测器的辅助安装工装,在实际安装模块化探测器的过程中,将探测单元放置在翻转机构上,通过升降机构带动探测单元上升,上升到位后,通过翻转机构将其倾斜一定角度,以安装到支架上所设置的安装组件上,如此,不仅以提高探测单元的安装效率,还可提升整体模块化探测器的组装效率。
38.以上内容是结合具体的实施方式对本技术所作的进一步详细说明,不能认定本技术的具体实施只局限于这些说明。对于本技术所属技术领域的普通技术人员来说,在不脱离本技术发明构思的前提下,还可以做出若干简单推演或替换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1