一种自动治具盖板弹力测试设备的制作方法
1.本实用新型涉及自动化设备技术领域,具体涉及一种自动治具盖板弹力测试设备。
背景技术:
2.由于治具盖板的弹簧顶针是保证pcb板贴合度的重要零部件,在治具盖板经过超声波清洗后,清洗液、助焊剂等可能会残留在顶针活动间隙中,加上顶针在高温环境下的加速老化,最终导致顶针弹力减弱,因此需要在清洗后或者定期对治具盖板上的顶针进行检查。
3.压力传感器由压力敏感元件和信号处理单元组成,是工业实践中最为常用的一种传感器,广泛应用于各种工业自控环境。通常采用压力传感器对治具盖板上顶针的弹力测试进行测试,车间大板治具经过超声波清洗后需对盖板上的顶针进行弹力测试,传统的顶针弹力测试一般通过人工进行检测,然而人工检测费时费力且不易操作,检测过程中也比较容易出错。
技术实现要素:
4.本实用新型的目的在于针对现有技术的缺陷和不足,提供一种能够代替人工检测且检测效率更高的自动治具盖板弹力测试设备。
5.为实现上述目的,本实用新型采用以下技术方案是:
6.一种自动治具盖板弹力测试设备,其包括:机架、弹力检测机构、上料机构、下料机构、移动机构及视觉定位机构,所述弹力检测机构设置在机架上,所述弹力检测机构具有定位盘及压力传感器,所述压力传感器设置在定位盘上,所述移动机构包括移动模组及用以抓取治具盖板的机械手,所述机械手安装在移动模组上,并活动往返于弹力检测机构和上料机构、下料机构之间,所述上料机构及下料机构位于移动机构的下方,所述下料机构包括第一传送机构和第二传送机构,第一传送机构和第二传送机构并列设置,所述视觉定位组件安装在机械手上,位于上料机构、下料机构的上方。
7.进一步,所述上料机构、第一传送机构及第二传送机构分别具有挡板、固定框架、竖直模组、传动机构、顶升机构及定位组件,所述固定框架的两侧各设置有一挡板,所述竖直模组设置在固定框架的前端,竖直模组位于移动机构的下方,所述定位组件设置在固定框架前端的顶部,传动机构设置在固定框架上,所述顶升机构设置在固定框架上,靠近固定框架的后端。
8.进一步,所述竖直模组包括竖直滑轨、竖直滑块、驱动竖直滑块在竖直滑轨上滑动的第二电机、支撑板,所述竖直滑轨设置在固定框架的前端,竖直滑块可滑动的设置在竖直滑轨上,第二电机设置在竖直滑轨上,支撑板设置在竖直滑块上;
9.所述传动机构包括第三传动轮、传动轴、第二皮带、滚筒、调整滚筒组件、调整滚筒组件固定板、第三电机,所述第三电机的两端各连接有一滚筒,两滚筒的两侧各设置有一调
整滚筒组件,调整滚筒组件安装在调整滚筒组件固定板上,所述固定框架的后端设置有一传动轴,传动轴的左右两侧各设置有一第三传动轮,所述固定框架前端的两侧各设有一第三传动轮,所述固定框架的左右两侧皆设置有第二皮带,所述第二皮带位于两侧挡板之间,所述第二皮带的前后两端分别与第三传动轮连接,且两侧第二皮带各连接滚筒及调整滚筒组件;
10.所述顶升机构设置在两侧第二皮带之间,所述顶升机构包括顶升板、限位组件、限位气缸、限位安装板、顶升气缸及升降丝杆,所述升降丝杆设置有四根,四根升降丝杆竖直穿过并安装在限位安装板上,顶升板设置在四根升降丝杆的顶端,顶升气缸的一端竖直穿过限位安装板并设置在顶升板的底部,限位组件设置在限位安装板上并位于顶升板的后端,限位组件连接限位气缸,限位安装板固定在所述固定框架上;
11.所述定位组件包括定位块、定位气缸及第二光电传感器,所述定位块及定位气缸设置在所述固定框架前端的顶部,所述定位块上设置有第二光电传感器;
12.所述两侧第二皮带上架设有用以放置治具盖板的料框,料框的底部具有一开口,料框通过传动机构在固定框架上往返。
13.进一步,上述自动治具盖板弹力测试设备还包括控制组件,所述控制组件设置在机架上,所述控制组件与弹力检测机构、上料机构、下料机构、移动机构及视觉定位机构电性连接。
14.进一步,所述机架上设置有一工作台,机架的侧面设置有挡板。
15.进一步,所述移动模组包括x轴滑轨、x轴滑块、驱动x轴滑块在x轴滑轨上滑动的x轴电机、y轴滑轨、y轴滑块、驱动y轴滑块在y轴滑轨上滑动的y轴电机,所述x轴滑轨设置在机架上,位于上料机构及下料机构的上方,x轴滑块可滑动设置在x轴滑轨上,x轴电机设置在x轴滑轨上,所述y轴滑块可滑动设置在y轴滑轨上,y轴滑轨设置在x轴滑块上,y轴电机设置在y轴滑轨上。
16.进一步,所述机械手包括固定板、安装板、驱动组件、夹爪、夹爪气缸、第一电机、第一传动轮、第二传动轮、第一皮带及第一光电传感器,所述固定板设置在所述y轴滑块上,所述安装板设置在固定板上,所述驱动组件包括驱动滑轨、驱动滑块、驱动杆、驱动固定板,驱动滑轨设置在安装板的底面,驱动滑轨的两端皆设置有驱动滑块,两驱动滑块上各设置有一驱动固定板,所述驱动杆安装在驱动固定板上,驱动杆的两端各设置有一夹爪,两夹爪分别与一驱动固定板连接,两夹爪上各设置有一夹爪气缸,所述第一电机设置在安装板上,第一电机连接第一传动轮,驱动杆的一端连接第二传动轮,第一传动轮和第二传动轮通过第一皮带连接,所述安装板上设置有一第一光电传感器。
17.进一步,所述弹力测试机构还具有滑轨和滑台,所述定位盘设置在滑台上,所述滑台可滑动的设置在滑轨上,所述滑轨设置在机架上。
18.进一步,所述视觉定位机构包括相机支架、相机及光源,所述相机支架固定在机械手上,相机设置在相机支架上,相机的下方设置有光源。
19.采用上述技术方案后,本实用新型通过移动模组带动机械手将上料机构上的治具盖板抓取至弹力检测机构的上方,通过视觉定位机构对弹力测试机构上的压力传感器进行视觉定位,机械手与弹力检测机构配合,通过压力传感器检测治具盖板上顶针的弹力是否合格,并通过机械手将合格和不合格的治具盖板分别抓取至第一传送机构和第二传送机
构。通过各个机构的配合,实现了治具盖板顶针弹力的自动测试,代替了人工检测的方式,降低了出错率,提高了检测效率,节约了人工。
附图说明
20.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
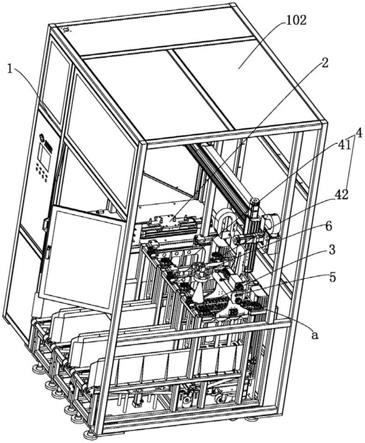
21.图1是本实用新型的结构示意图。
22.图2是本实用新型的左视图。
23.图3是本实用新型的主视图。
24.图4是本实用新型中移动模组51的结构示意图。
25.图5是本实用新型中机械手52的结构示意图。
26.图6是本实用新型中上料机构3的立体图。
27.图7是本实用新型中上料机构3上架设有料框8的结构示意图。
28.图8是本实用新型中上料机构3的俯视图。
29.图9是本实用新型中皮带调整组件b的结构示意图;
30.图10是本实用新型中顶升机构13的结构示意图。
31.图11是本实用新型中料框8的结构示意图。
32.图12是本实用新型中弹力检测机构2的结构示意图。
具体实施方式
33.为了进一步解释本实用新型的技术方案,下面通过具体实施例来对本实用新型进行详细阐述。
34.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
35.参看图1
‑
图12所示,本实用新型揭示了一种自动治具盖板弹力测试设备,其包括机架1、弹力检测机构2、上料机构3、下料机构4、移动机构5、视觉定位机构6及控制组件7。
36.所述机架1上设置有一工作台101,机架1的侧面设置有挡板102。
37.如图12所示,所述弹力检测机构2设置在机架1上,弹力检测机构2具有定位盘21、压力传感器22、滑轨23及滑台24,所述滑轨23设置在工作台101上,所述滑台24可滑动的设置在滑轨23上,所述定位盘21设置在滑台24上,定位盘21上设置有四个压力传感器22,压力传感器22用于检测治具盖板a顶针的弹力。
38.如图4所示,所述移动机构5包括移动模组51及机械手52,所述移动模组51设置在机架1上,机械手52设置在移动模组51上,所述移动模组51包括x轴滑轨511、x轴滑块512、驱
动x轴滑块512在x轴滑轨511上滑动的x轴电机513、y轴滑轨514、y轴滑块515、驱动y轴滑块515在y轴滑轨514上滑动的y轴电机516,所述x轴滑轨511设置在机架1上,位于上料机构3及下料机构4的上方,x轴滑块512可滑动设置在x轴滑轨511上,x轴电机513设置在x轴滑轨511上,所述y轴滑块515可滑动设置在y轴滑轨514上,y轴滑轨514设置在x轴滑块512上,y轴电机516设置在y轴滑轨514上。
39.如图5所示,所述机械手52包括固定板520、安装板521、驱动组件522、夹爪523、夹爪气缸524、第一电机525、第一传动轮526、第二传动轮527、第一皮带528及第一光电传感器529,所述固定板520设置在所述y轴滑块515上,所述安装板521设置在固定板520上,所述驱动组件522包括驱动滑轨5221、驱动滑块5222、驱动杆5223、驱动固定板5224,驱动滑轨5221设置在安装板521的底面,驱动滑轨5221的两端皆设置有驱动滑块5222,驱动滑块5222上设置有驱动固定板5224,所述驱动杆522安装在驱动固定板5224上,驱动杆522的两端各设置有一夹爪523,两夹爪523分别与一驱动固定板5224连接,两夹爪523上各设置有一夹爪气缸524,所述第一电机525设置在安装板521上,第一电机525连接第一传动轮526,驱动杆5224的一端连接第二传动轮527,第一传动轮526和第二传动轮527通过第一皮带528连接,所述安装板521上设置有一第一光电传感器529。
40.机械手52设置在y轴滑块515上,y轴滑块515可在y轴电机516的驱动下在y轴滑轨514上滑动,y轴滑轨514设置在x轴滑块512上,x轴滑块512在x轴电机513的驱动下在x轴滑轨511上滑动,从而使得y轴滑轨514能够在x轴滑轨511上滑动,继而机械手52能够在y轴滑轨514的带动下在x轴滑轨511上滑动,第一电机525驱动第一传动轮526,第一传动轮526通过第一皮带528带动第二传动轮527,第二传动轮527带动驱动杆5224驱动,从而控制两夹爪523动作,两夹爪523与夹爪气缸524配合,夹取治具盖板a。
41.机械手52活动往返于弹力检测机构2和上料机构3、下料机构4之间。
42.所述下料机构4包括第一传送机构41和第二传送机构42,第一传送机构41和第二传送机构42并列设置,所述上料机构3和第一传送机构41和第二传送机构42的结构相同。
43.如图6
‑
图9所示,所述上料机构3、第一传送机构41及第二传动机构42分别具有固定框架9、挡板10、竖直模组11、传动机构12、顶升机构13及定位组件14,所述固定框架9的两侧各设置有一挡板10,所述竖直模组11设置在固定框架9的前端,位于移动机构5的下方,传动机构12设置在固定框架9上,顶升机构13设置在固定框架9上,靠近固定框架9的后端,定位组件14设置在固定框架9上,靠近竖直模组11,料框8架设在传动机构12上;
44.所述竖直模组11包括竖直滑轨111、竖直滑块112、驱动竖直滑块112在竖直滑轨111上滑动的第二电机113、支撑板114,所述竖直滑轨111设置在固定框架9的前端,竖直滑块112可滑动的设置在竖直滑轨111上,第二电机113设置在竖直滑轨111上,支撑板114设置在竖直滑块112上,支撑板114可在竖直滑块112的带动下在竖直滑轨111上滑动;
45.所述传动机构12包括第三传动轮121、传动轴122、第二皮带123、滚筒124、调整滚筒组件125、调整滚筒组件固定板126、第三电机127;滚筒124、调整滚筒组件125、调整滚筒组件固定板126、第三电机127组成皮带调整组件b,所述第三电机127的两端各连接有一滚筒124,两滚筒124的两侧各设置有一调整滚筒组件125,调整滚筒组件125安装在调整滚筒组件固定板126上,所述固定框架9的后端设置有一传动轴122,传动轴122的左右两侧各设置有一第三传动轮121,所述固定框架9前端的两侧各设有一第三传动轮121,所述固定框架
9的左右两侧各设置有第二皮带123,所述第二皮带123位于两侧挡板10之间,所述第二皮带123的前后两端分别与第三传动轮121连接,且两第二皮带123各连接滚筒124及调整滚筒组件125;
46.如图10所示,所述顶升机构13设置在两侧第二皮带123之间,所述顶升机构13包括顶升板131、限位组件132、限位气缸133、限位安装板134、顶升气缸135及升降丝杆136,所述升降丝杆136设置有四根,四根升降丝杆136竖直穿过并安装在限位安装板134上,顶升板131设置在四根升降丝杆136的顶端,顶升气缸135的一端竖直穿过限位安装板134并设置在顶升板131的底部,限位组件132设置在限位安装板134上并位于顶升板131的后端,限位组件132连接限位气缸133,限位安装板134固定在所述固定框架上9;
47.所述定位组件14包括定位块141、定位气缸142及第二光电传感器143,定位气缸142设置有三个,所述定位块141设置在固定框架9前端顶部的左侧,定位气缸142设置在固定框架9前端顶部的右侧及后端,所述定位块141上设置有第二光电传感器143;
48.所述两侧第二皮带123上架设有用以放置治具盖板a的料框8,料框的底部具有一开口81,开口81与竖直模组11的支撑板114配合,料框8通过传动机构12在固定框架9上往返。
49.所述上料机构3可对接产品流水线或治具盖板a生产过程中上一道工序的设备,所述下料机构4可对接agv小车等运输设备。
50.传动机构12的第三电机127驱动第二皮带123传动,料框8从上一道工序中盛装治具盖板a通过第二皮带123传送到固定框架9的前端位置,然后通过竖直模组11的支撑板114将料框8内的治具盖板a向上抬升,当料框8上的第一块治具盖板a被抬升到固定框架9前端的顶部时,通过定位组件14对治具盖板a的位置进行定位调整。
51.所述视觉定位机构6包括相机支架61、相机62及光源63,所述相机支架61固定在机械手52上,相机62设置在相机支架61上,相机62的下方设置有光源63。
52.治具盖板a在上料机构3上调整好位置后,移动模组51带动机械手52移动至上料机构3的上方,通过视觉定位机构6对治具盖板a的位置进行定位,然后移动模组51带动机械手52将上料机构3上的治具盖板a夹取至弹力测试机构2的上方,然后视觉定位机构6对弹力测试机构2进行位置定位,机械手52抓取治具盖板a下压,使得治具盖板a上的顶针头部顶住压力传感器22,通过测得的压力数值判断治具盖板a顶针的弹力是否合格,压力数值在规定范围内则代表顶针的弹力合格,压力传感器22的数量可以根据需要进行调整,本实施例中压力传感器22的数量为四,因此一次能够检测四根顶针,检测完四根顶针后,通过视觉定位机构6、机械手52和弹力测试机构2的配合,调整压力传感器22及治具盖板a的位置,从而将剩余的未检测的顶针全部检测完毕。
53.合格的治具盖板a通过机械手52抓取至第一传送机构41上的料框8内,通过第一传送机构41传送到agv小车上或下一道工序,不合格的治具盖板a通过机械手52抓取至第二传送机构42上的料框8内,通过第二传送机构42传送至不良品放置处。
54.上料机构3上料框8内的治具盖板a被竖直模组11的支撑板114抬起后,料框8在第二皮带123的带动下后退,退至顶升机构13处时,限位组件132对料框8限位,顶升板131在顶升气缸135的带动下上升,使得料框8能够脱离第二皮带125,停留在顶升板131上,等待人工取出,取出空料框8后,装有治具盖板a的料框8继续通过上料机构3进行上料。
55.所述控制组件7设置在机架1上,所述控制组件7与弹力检测机构2、上料机构3、下料机构4、移动机构5及视觉定位机构6电性连接。
56.通过各个机构的配合,实现了治具盖板a顶针弹力的自动测试,代替了人工检测的方式,降低了出错率,提高了检测效率,节约了人工。
57.本实用新型的工作过程为:自动治具盖板弹力测试设备可设置在产品生产线上,上料机构3对接治具盖板a在生产过程中的上一道工序,且治具盖板a装在料框8内,通过传动机构12的第二皮带123传送至移动机构5的下方,移动模组51带动机械手52将上料机构3上料框8内的治具盖板a抓取至弹力测试机构2的上方;视觉定位机构6对弹力测试机构2上的压力传感器22进行视觉定位,机械手52带动治具盖板a下压,使得治具盖板a上的顶针头部顶住压力传感器22,控制组件7连接上位机,通过上位机判断治具盖板a上的顶针弹力测试是否合格,压力传感器22设置有四根,一次可以检测四根治具盖板a的顶针,检测完四根顶针后,通过上位机判断这四根顶针是否合格,若合格则通过调节弹力测试机构2上压力传感器22及移动机构5的机械手52的位置,对治具盖板a上未测量的顶针进行弹力测试,直至治具盖板a上的顶针全部测完为止,若全部合格,则通过移动模组51带动机械手52将治具盖板a夹取至下料机构4的第一传送机构41上的料框8内,结束检测;若不合格,则通过移动模51组带动机械手52将治具盖板a夹取至下料机构4上的第二传送机构42上的料框8内,直到将所有待检测的治具盖板a检测完成,通过各个机构的配合,实现了治具盖板a顶针弹力的自动测试,代替了人工检测的方式,降低了出错率,提高了检测效率,节约了人工。
58.以上所述,仅用以说明本实用新型的技术方案而非限制,本领域普通技术人员对本实用新型的技术方案所做的其它修改或者等同替换,只要不脱离本实用新型技术方案的精神和范围,均应涵盖在本实用新型的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1