用于与无人机对接的货物传输设备及建筑物的制作方法
1.本公开涉及无人机的物流装卸货技术领域,具体地,涉及一种用于与无人机对接的货物传输设备及建筑物。
背景技术:
2.随着电商经济的快速发展、物流需求的急剧上升,随着无人机技术的成熟,无人机也逐步应用到物流运输领域。随着无人机技术在配送领域的应用研究逐渐增多,与无人机配送相适应的自动机场相关研究也愈加精细、完善。在无人机配送流程中,自动机场主要承担辅助无人机的自主起飞、降落,对无人机进行更换电池、装卸货物、简单维护等操作。当无人机降落到自动机场后需要通过货物装卸系统从无人机上卸下货物或将货物装载至无人机,但是缺乏对无人机所运输的货物的检测,这样可能会导致携带货物起飞的无人机发生危险,损坏无人机及货物。
技术实现要素:
3.本公开的目的是提供一种用于与无人机对接的货物传输设备及建筑物,该货物传输设备能够对无人机所运输的货物进行检测,保证无人机的安全运输。
4.为了实现上述目的,本公开提供一种用于与无人机对接的货物传输设备,其包括:
5.传送机构,包括货物传输支架、第一驱动装置和用于承载货物的传送装置,所述传送装置可移动地设置在所述货物传输支架上,所述第一驱动装置用于驱动所述传送装置沿所述货物传输支架移动,以将货物运输至无人机或从将所述货物运离所述无人机,
6.第一检测器,用于获取所述传送装置所承载的所述货物的重量信息并输出与所述重量相关的信号;
7.比较器电路,与所述第一检测器和所述第一驱动装置分别信号连接,用于对预设阈值信号以及所述与重量相关的信号进行比较,并对所述第一驱动装置输出使能驱动或停止驱动的控制信号。
8.可选地,所述传送装置包括托架和载货平台,所述托架可升降地设置于所述货物传输支架,所述载货平台设置于所述托架,所述第一检测器夹设于所述载货平台和所述托架之间。
9.可选地,所述货物传输设备包括控制器和第二检测器,所述第二检测器用于获取所述货物在所述传送装置上的位置信息并且输出与所述位置信息相关的信号,所述控制器包括所述比较器电路,所述控制器分别与所述第二检测器和所述第一驱动装置信号连接,用于对所述与所述位置信息相关的信号进行判断,并对所述第一驱动装置输出使能驱动或停止驱动的控制信号。
10.可选地,所述传送装置还包括货物夹正组件和第二驱动装置,所述货物夹正组件可活动地设置于所述托架,以在所述第二驱动装置的驱动下,校正所述货物在所述载货平台上的位置。
11.可选地,所述货物夹正组件包括转动件、连杆、夹爪滑块、夹爪滑轨和夹爪,所述转动件、所述连杆、所述夹爪滑块和所述夹爪滑轨均设置于所述载货平台的底部,所述第二驱动装置与所述转动件传动连接,所述连杆的一端与所述转动件铰接,所述连杆的另一端与所述夹爪滑块铰接,所述夹爪滑块可滑动地设置于所述夹爪滑轨,所述转动件、所述连杆和所述夹爪滑块共同构造成曲柄滑块机构,所述夹爪滑轨延伸至所述载货平台的外侧,所述夹爪的顶部凸出于所述载货平台的用于承载货物的表面,以能够推顶所述货物。
12.可选地,所述夹爪包括臂部和用于推顶所述货物的爪部,所述爪部凸出设置于所述载货平台的用于承载货物的表面,所述臂部的一端与所述夹爪滑块固定连接,所述臂部的另一端与所述爪部固定连接,所述爪部构造成l型结构,所述l型结构的内侧朝向所述载货平台。
13.可选地,所述传送装置包括两组所述货物夹正组件,所述载货平台构造成四方形结构,两组所述货物夹正组件中的所述夹爪滑轨分别延伸至所述四方形结构的两对角的外侧,两组所述货物夹正组件中的夹爪分别设置于所述四方形结构的对角侧,两组所述货物夹正组件共用一个所述转动件,所述转动件的转轴的两侧分别铰接有两个所述连杆。
14.可选地,所述传送装置还包括转运组件和第三驱动装置,所述转运组件在所述第三驱动装置的驱动下,将所述载货平台上的所述货物运离或运至所述载货平台。
15.可选地,所述转运组件构造成皮带传送机构并且包括输送带和一对皮带轮,所述输送带套设于所述一对皮带轮,所述输送带的上表面为所述载货平台的用于承载所述货物的表面,所述第三驱动装置用于驱动所述皮带轮转动。
16.可选地,所述货物传输设备还包括:
17.起降平台,具有用于供无人机停放的停放区,所述停放区内形成有供货物从所述无人机装卸的装卸口;
18.货物缓存机构,包括运输装置和用于与楼宇物流系统衔接的货物缓存平台,所述货物缓存平台包括货物交接口和多个货物存储区,所述运输装置用于在所述货物交接口和所述货物存储区之间运输所述货物;
19.所述传送装置在所述第一驱动装置的驱动下,在所述装卸口和所述货物交接口之间传送所述货物。
20.可选地,所述运输装置包括第四驱动装置、辊筒和沿第一方向延伸的缓存支架,多个所述辊筒沿所述第一方向布置,并且所述辊筒的两端可转动地连接在所述缓存支架上,所述第四驱动装置用于驱动所述多个辊筒转动,所述辊筒的外周面共同形成所述货物缓存平台,所述第四驱动装置用于驱动所述辊筒转动,以在所述货物交接口和所述货物存储区之间运输所述货物。
21.可选地,所述货物缓存机构还包括第三驱动装置和一个或多个隔板,相邻的两个所述货物存储区之间设置有所述隔板,所述隔板可升降地设置于所述缓存支架并且设置于所述辊筒之间,所述第三驱动装置用于驱动所述隔板升降。
22.可选地,所述货物缓存机构还包括均固定设置于所述缓存支架的第一固定挡板和第二固定挡板,所述第一固定挡板和所述货物交接口分别设置于所述货物缓存平台的沿所述第一方向的两端,所述第二固定挡板沿所述第一方向延伸,并且所述第二固定挡板和所述活动挡板分别设置在所述辊筒的沿自身轴线方向两侧。
23.可选地,所述货物缓存机构还包括活动挡板组件,所述货物缓存平台还设置有用于与所述楼宇物流系统传递货物的货物转运口,所述活动挡板组件包括第五驱动装置和沿所述多个货物存储区的布置方向延伸的活动挡板,所述活动挡板可活动地设置于所述货物转运口,以在所述第五驱动装置的驱动下,打开或关闭所述货物转运口。
24.可选地,所述活动挡板可升降地设置于所述缓存支架,所述第五驱动装置包括第五驱动件和凸轮组件,所述凸轮组件包括相配合的凸轮和推动件,所述第五驱动件固定于所述缓存支架且用于驱动所述凸轮转动,所述推动件绕自身转轴可转动地与所述活动挡板连接。
25.可选地,所述货物传输设备包括多个所述货物缓存机构,多个所述货物缓存机构分别布置在所述传送装置的两侧。
26.可选地,所述第一驱动装置包括第一驱动器、传动带组件和配重块,所述传动带组件包括传动带和沿所述传送装置的移动方向间隔设置的两个带轮,所述传动带套设于所述两个带轮上,所述第一驱动器用于驱动所述带轮转动,位于所述带轮其中一侧的所述传动带与所述传送装置固定连接,另一侧的所述传动带固定连接有所述配重块。
27.根据本公开的另一方面,还提供了一种建筑物,包括建筑物主体和安装在该建筑物主体上的上述的货物传输设备。
28.通过上述技术方案,至少能够达到如下技术效果:
29.本公开提供的货物装卸系统通过传送机构与无人机的配合,控制传送装置在无人机和货物存取点或货物配送点之间传送货物,实现对无人机上的货物的自动装卸,这样能够将距离无人机的停放点较远的货物直接传送到无人机的停放点进行装卸,操作过程简单,装卸效率高,并且对控制系统的要求低。并且,由于设置用于检测货物的重量信息的第一检测器,能够在将货物装载上无人机前检测该货物的重量,只有比较器电路获取到货物未超重的前提下,才会启动第一驱动装置将货物运输至装卸口处装载至无人机上,从而能够防止将超重的货物装载到无人机上,保证无人机的运输安全。此外,在从无人机上卸载货物时,可通过第一检测器获取到货物施加到传送装置上的重量信息,比较器电路将该重量信息与货物本身的重量进行对比,若该重量信息小于货物本身的重量则判断出此时无人机并未完全释放货物,不启动第一驱动装置;若该重量信息约等于货物本身的重量,则判断出此时无人机已完全释放货物,则可启动第一驱动装置,将货物运离无人机。因此,还能够通过第一检测器保证无人机完全释放货物后,才启动第一驱动装置,保证货物运输的有效性和安全性。
30.本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
31.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
32.图1是一种示例性的用于与无人机对接的货物传输设备的立体结构示意图;
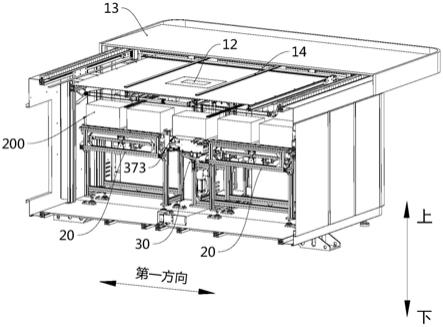
33.图2是一种示例性的货物传输设备的剖视立体结构示意图;
34.图3是一种示例性的货物传输设备的传送机构的立体结构示意图;
35.图4是一种示例性的货物传输设备的传送机构和货物缓存机构的立体结构示意
图;
36.图5是一种示例性的货物传输设备的货物缓存机构的第一视角的立体结构示意图;
37.图6是图5中i处的局部放大示意图;
38.图7是一种示例性的货物传输设备的货物缓存机构的第二视角的立体结构示意图;
39.图8是一种示例性的货物传输设备的传送装置的立体结构示意图;
40.图9是一种示例性的货物传输设备的传送装置的部分结构的立体结构示意图;
41.图10是图9中ii处的局部放大示意图;
42.图11是一种示例性的货物传输设备的控制原理图。
43.附图标记说明
44.100
‑
货物传输设备;10
‑
起降平台;11
‑
停放区;12
‑
装卸口;13
‑
防雨顶盖;14
‑
推正机构;20
‑
货物缓存机构;21
‑
运输装置;211
‑
辊筒;22
‑
货物缓存平台;221
‑
货物交接口;222
‑
货物存储区;223
‑
货物转运口;23
‑
缓存支架;24
‑
第三驱动装置;25
‑
隔板;26
‑
第五驱动装置;261
‑
第五驱动件;262
‑
凸轮;263
‑
推动件;27
‑
活动挡板;28
‑
第一固定挡板;29
‑
第二固定挡板;30
‑
传送机构;31
‑
货物传输支架;32
‑
传送装置;33
‑
第一驱动装置;331
‑
第一驱动器;332
‑
传动带;333
‑
配重块;34
‑
货物夹正组件;341
‑
转动件;342
‑
连杆;343
‑
夹爪滑块;344
‑
夹爪滑轨;345
‑
夹爪;3451
‑
臂部;3452
‑
爪部;35
‑
托架;36
‑
第二驱动装置;37
‑
转运组件;371
‑
输送带;372
‑
皮带轮;373
‑
载货平台;50
‑
货物传输通道;81
‑
控制器;811
‑
比较器电路;82
‑
第二检测器;83
‑
第一检测器;200
‑
货物。
具体实施方式
45.以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
46.在本公开中,在未作相反说明的情况下,使用的方位词如“上、下、底、顶”是指用于与无人机对接的货物传输设备处于使用时惯常摆放的方位或位置关系,可以理解为沿重力方向的上、下,也与附图中图面的“上、下”相对应;“内、外”是指相对于部件或结构本身轮廓的“内、外”。此外,需要说明的是,所使用的术语如“第一”、“第二”等是为了区别一个要素和另一个要素,不具有顺序性和重要性。另外,在参考附图的描述中,不同附图中的同一标记表示相同的要素。
47.在相关技术中,本技术的发明人发现,在将货物装载到无人机之前,缺乏对货物200的重量的检测。如果将超重的货物装载到无人机上,无人机起飞将发生危险。而如果在无人机上加装重量检测装置,将会增加机身重量,进而对无人机动力系统提出更高要求,成本高,也会影响无人机的续航能力。
48.基于此,本公开提供一种用于与无人机对接的货物传输设备100,用于在无人机停放点以及货物存放点或货物配送点之间远程自动装卸货物200。如图1
‑
11所示,该用于与无人机对接的货物传输设备100包括传送机构30、第一检测器83和比较器电路811。其中,传送机构30包括货物传输支架31、传送装置32和第一驱动装置33。传送装置32可移动地设置在货物传输支架31上,第一驱动装置33用于驱动传送装置32沿货物传输支架31移动,以将货
物200运输至无人机或从将货物200运离无人机。第一检测器83用于获取传送装置32所承载的货物200的重量信息并输出与所述重量相关的信号,换言之,该第一检测器83用于获取货物200施加在传送装置32上的重量信息。比较器电路811与第一检测器83和第一驱动装置33分别信号连接,用于对预设阈值信号以及与重量相关的信号进行比较,并对所述第一驱动装置33输出使能驱动或停止驱动的控制信号,以根据重量信息判断出货物200是否超重,并且比较器电路811在货物200未超重的前提下,启动第一驱动装置33将货物200运输至无人机,或者,比较器电路811根据重量信息判断出货物200是否被无人机完全释放,并且比较器电路811在货物200被无人机完全释放的前提下,启动第一驱动装置33将货物200运离无人机。可选地,第一驱动装置33可为多种形式,例如可以为缆绳、丝杠螺母机构、齿轮齿条机构或传送带等传动机构中的一种或多种组合。
49.其中,比较电路可以由cpu、dsp、fpga、单片机、arm等实现,也可由简单的比较器元件实现(如一个引脚接收重量信号,一个引脚接阈值信号即可),本公开对此不作限制。第一检测器83可包括用于检测重量的重量传感器。预设阈值信号可为无人机的最大载货能力,即能够运输的最大重量。
50.在本公开的一种实施方式中,货物传输设备100还包括起降平台10,该起降平台10具有用于供无人机停放的停放区11,停放区11内形成有供货物200从无人机装卸的装卸口12。
51.此外,本公开中涉及的无人机可以具有内置或外挂的货舱,该货舱中可以设置有用于锁止货物200的锁定机构,例如电动卡扣、自动开关门等机构,当货物200被送至该货舱中时,锁定机构可自动锁止货物200,当卸货时,锁定机构可自动解锁,使货物200从货舱中卸出。
52.上述的用于与无人机对接的货物传输设备100的卸货过程为:在无人机降落前,可以通过第一驱动装置33驱动传送装置32移动至用于承载无人机上的货物装卸口12处,接着,无人机降落在起降平台10的停放区11,并将货物200对准装卸口12卸载在传送装置32上,通过传送装置32将货物200运离无人机,运输至货物配送点,或,将货物200运输至货物物流系统,通过该货物物流系统将货物200运输至货物配送点。
53.上述货物传输设备的货物装载过程为:将货物200放置到传送装置32上,通过第一驱动装置33将货物200传送至无人机的货物装卸口12,被传送到无人机的起降平台10上,接着,可以通过传送装置32将货物200继续传送至无人机的货舱内并卡止在该货舱内,最后通过无人机将货物200运送至目的地。
54.在本公开中不限制传送机构30所连接的区域,例如传送机构30可连接在无人机的货物装卸口12以及,最终的货物配送点或最初的取货点处,此时,第一检测器83可设置在取货点处来检测货物200的重量,也可设置在传送装置32上来检测货物200的重量;或者,传动机构连接在无人机的货物装卸口12和与货物物流系统连接的货物200中转平台处,此时,第一检测器83可设置在传送装置32上来检测货物200的重量。
55.上述货物传输设备可以应用在多种场景中,如无人配送仓库、商家端、居民楼、门禁森严的研究院或工业园区等。作为本公开的一种示例性应用,上述货物传输设备可以用于商家端(诸如生产厂家、餐饮店、百货店等)自动配送诸如快递、外卖等货物200的物流系统中,则无人机的起降平台10可以安装在商家端所处的建筑物例如楼宇的顶端,以便于无
人机停放,可以在该建筑物中的多个商铺中设置取货口,则只需在对应商铺中将货物200投放至取货点,通过取货小车或物流系统中的其他运输机构将货物200运输至传送装置32上,或通过传送装置32直接将货物200传送到起降平台10上的装卸口12,并进一步装载在无人机的货舱中,无人机就可以将该货物200送至消费者家中,整个装卸过程十分便捷,此时为了提高传送效率,货物传输支架31可以沿竖直方向布置,以将楼宇的顶端楼顶和各个楼层连通。
56.通过上述的技术方案,本公开提供的货物传输设备通过传送机构30与无人机的配合,控制传送装置32在无人机和货物存取点或货物配送点之间传送货物200,实现对无人机上的货物200的自动装卸,这样能够将距离无人机的停放点较远的货物200直接传送到无人机的停放点进行装卸,操作过程简单,装卸效率高,并且对控制系统的要求低。并且,由于设置用于检测货物200的重量信息的第一检测器83,能够在将货物装载上无人机前检测该货物200的重量,只有比较器电路811获取到货物200未超重的前提下,才会启动第一驱动装置33将货物200运输至装卸口12处装载至无人机上,从而能够防止将超重的货物装载到无人机上,保证无人机的运输安全。此外,在从无人机上卸载货物200时,可通过第一检测器83获取到货物200施加到传送装置32上的重量信息,将该重量信息与货物200本身的重量进行对比,若该重量信息小于货物200本身的重量则判断出此时无人机并未完全释放货物200,不启动第一驱动装置33;若该重量信息约等于货物200本身的重量,则判断出此时无人机已完全释放货物200,则可启动第一驱动装置33,将货物200运离无人机。因此,还能够通过第一检测器83保证无人机完全释放货物200后,才启动第一驱动装置33,保证货物200运输的有效性和安全性。
57.在本公开中对第一检测器83具体的设置位置不作限制,在本公开的一种实施方式中,如图3和图8所示,传送装置32包括托架35和载货平台373。托架35为整个传送装置32的支撑结构,托架35可升降地设置于货物传输支架31。载货平台373设置于托架35。第一检测器83夹设于载货平台373和托架35之间,获取到载货平台373以及放置在载货平台373上的货物200的重量。
58.在该本实施方式中,第一检测器83获取的是货物200连同载货平台373的重量,载货平台373的重量是固定的而且可提前获知,因此,货物200的重量等于第一检测器83获取的重量值减去载货平台373的重量。
59.在其他实施方式中,第一检测器83还可设置在载货平台373的表面上,直接获取货物200本身的重量。
60.进一步地,在本公开的一种实施方式中,如图8所示,第一检测器83构造成长条块状结构。第一检测器83的第一端的上表面与载货平台373的底部连接,第二端的下表面与拖架连接,而且,第一检测器83的第一端的下表面未与托架35接触,第一端的下表面悬空设置,第二端的上表面未与载货平台373接触,第二端的上表面悬空设置,从而使得第一检测器83构造成悬臂结构,以便获取到载货平台373上货物200的重量。可选地,第一检测器83可为称重传感器。
61.为了获知到货物200的其他信息,在本公开的一种实施方式中,如图8所示,货物传输设备100还包括控制器81和第二检测器82,第二检测器82用于获取货物200在传送装置32上的位置信息并且输出与位置信息相关的信号,控制器81包括比较器电路811,控制器81分
别与第二检测器82和第一驱动装置33信号连接,用于对与位置信息相关的信号进行判断,并对第一驱动装置33输出使能驱动或停止驱动的控制信号,以在货物的重量未超重并且位置信息正确的前提下,启动第一驱动装置33,将货物200运离或运至无人机。可选地,第二检测器82可包括能够检测位置信息的传感器,如红外线传感器、磁电感应式传感器等。
62.其中,控制器81用于控制该货物运输系统100的整体操作,在一示例性实施例中,控制器81可以为一个或多个应用专用集成电路(application specific integrated circuit,简称asic)、数字信号处理器(digital signal processor,简称dsp)、数字信号处理设备(digital signal processing device,简称dspd)、可编程逻辑器件(programmable logic device,简称pld)、现场可编程门阵列(field programmable gate array,简称fpga)、微控制器81、微处理器或其他电子元件。
63.第二检测器82一方面可检测货物200在传送装置32上摆放的位置是否正确,另一方面可检测货物200的底面是否与载货平台373完全接触。因此,上述的位置信息包括货物200在传送装置32上的摆放位置以及货物200的底面是否与载货平台373完全接触,以辅助第一检测器83来检测货物200是否被完全释放。当卸载无人机上的货物200时,只有在第一检测器83获取到货物200施加到传送装置32上的重量信息约等于货物200本身的重量,并且,第二检测器82获取到货物200在传送装置32上的位置信息是正确的,满足该两个条件的前提下,控制器81才会启动第一驱动装置33,将货物200运离无人机。另外,当需要将货物运输至无人机时,第二检测器82用于检测货物的位置信息是否正确,第一检测器83检测货物是否在预设阀值内,只有在货物的位置信息正确并且货物未超重的前提下,才允许启动第一驱动装置33将货物运输至无人机,这样可保证未超重的货物与无人机的货仓对齐,而且被准确地被运进无人机的货仓中。
64.在一种实施方式中,如图8所示,第二检测器82设置在载货平台373的上表面的边缘处。进一步地,在一种实施方式中,货物传输设备100包括两个第二检测器82,该两个第二检测器82分别设置在载货平台373的对角的边缘处。设置在两对角处的第二检测器82能够对货物200的四个方位进行检测,从而能够全面地获取到货物200的位置信息,提高货物200的位置检测的准确性。
65.为了进一步地保证传动装置上所承载的货物200的位置正确,在本公开的一种实施方式中,如图3、图8
‑
10所示,传送装置32还包括货物夹正组件34和第二驱动装置36,货物夹正组件34可活动地设置于托架35,以在第二驱动装置36的驱动下,校正货物200在载货平台373上的位置,使得货物200的中部处于载货平台373的中部位置。可选地,第二驱动装置36可包括步进电机或伺服电机。
66.进一步地,控制器81还与该第二驱动装置36信号连接,以在第二检测器82检测到货物200的位置出现歪斜时,启动第二驱动装置36,通过货物夹正组件34摆正货物200。可以理解的是,也可在每次无人机释放货物200时,都启动第二驱动装置36来带动货物夹正组件34运动,若货物200位置正确,则货物200不会更改位置,若货物200位置歪斜,则在货物夹正组件34的作用下,校正位置。
67.通过设置货物夹正组件34来校正货物200在载货平台373上的位置,能够使得货物200的重心始终都处于载货平台373的中部,能够防止货物200歪斜地放置在载货平台373上后,在运输过程中发生掉落,或者,在货物装载至无人机前,对货物200的位置重新摆正,保
证货物200能够正确地装入无人机的货仓内。
68.在本公开中对货物夹正组件34的具体结构不作限制,可根据需要设计,只要能够将歪斜的货物200摆正即可。在一种实施方式中,如图9和图10所示,货物夹正组件34包括转动件341、连杆342、夹爪滑块343、夹爪滑轨344和夹爪345。转动件341、连杆342、夹爪滑块343和夹爪滑轨344均设置于载货平台373的底部。第二驱动装置36与转动件341传动连接,第二驱动装置36驱动转动件341转动。连杆342的一端与转动件341铰接,连杆342的另一端与夹爪滑块343铰接,夹爪滑块343可滑动地设置于夹爪滑轨344。转动件341、连杆342和夹爪滑块343共同构造成曲柄滑块机构。夹爪滑轨344延伸至载货平台373的外侧,夹爪345的顶部凸出于载货平台373的用于承载货物200的表面,以能够推顶货物200。
69.若货物200歪斜,外露于载货平台373,第二驱动装置36驱动转动件341转动,转动件341带动连杆342转动,连杆342带动夹爪滑块343沿夹爪滑轨344滑动,从而带动固定在夹爪滑块343上的夹爪345移动,从而推动外露于载货平台373的货物200,摆正货物200的位置。若货物200的位置正确,则刚开始运动时夹爪345不会接触到货物200,只有夹爪345运动到行程末端才刚好接触到货物200。
70.在本公开中,对夹爪345的形状不作限制,只要能够推顶货物200即可,在一种实施方式中,如图9所示,夹爪345包括臂部3451和用于推顶货物200的爪部3452,爪部3452凸出设置于载货平台373的用于承载货物200的表面,臂部3451的一端与夹爪滑块343固定连接,臂部3451的另一端与爪部3452固定连接。爪部3452构造成l型结构,l型结构的内侧朝向载货平台373。l型结构的内侧指的是l型结构的夹角小于180
°
的一侧。可选地,l型结构的夹角为90
°
。用于包装货物200的货箱大多为标准货箱,标准货箱大多为方块型结构。构造成l型结构的爪部3452能够便于与货物200的不同的侧面接触,从而能够增加与货物200的接触面积,能够从多个方向上推顶货物200。
71.为了更好地摆正货物200的位置,如图8和图9所示,传送装置32包括两组货物夹正组件34。载货平台373构造成四方形结构,两组货物夹正组件34中的夹爪滑轨344分别延伸至四方形结构的两对角的外侧。两组货物夹正组件34中的夹爪345分别设置于四方形结构的对角侧,两组货物夹正组件34共用一个转动件341,转动件341的转轴的两侧分别铰接有两个连杆342。
72.设置在对角侧的两个夹爪345能够兼顾从载货平台373的四个方向外露的货物200,从而保证无论货物200朝向哪个方向歪斜,均能够通过夹爪345摆正。
73.可选地,在一种实施方式中,如图9所示,转动件341构造成圆盘形结构,两个连杆342分别铰接在圆盘的边缘处,第二驱动装置36驱动转动件341转动,从而带动两个连杆342转动,继而使得两组曲柄滑块机构同步运动,从而使得两个夹爪345朝相互靠近的方向运动,从而将歪斜的货物200推顶至载货平台373上。
74.为了便于货物200在载货平台373和其他运输平台之间转运,如图8所示,传送装置32还包括转运组件37和第三驱动装置24。转运组件37在第三驱动装置24的驱动下,将载货平台373上的货物200运离或运至载货平台373,例如将货物200从载货平台373转运到下文的货物缓存平台22上,或,将货物200从载货平台373转运到运货小车上,将货物200从其他平台运输至载货平台373上。
75.在本公开中对转运组件37不作限制,例如,转动组件可为机械手等拾取机构,通过
机械手在不同的平台之间转运货物200。在本公开的一种实施方式中,转运组件37构造成皮带传送机构30并且包括输送带371和一对皮带轮372。输送带371套设于一对皮带轮372,输送带371的上表面为载货平台373的用于承载货物200的表面。第三驱动装置24用于驱动皮带轮372转动。如图8所示,输送带371的上表面为输送带371背离皮带轮372的一侧的表面。两个皮带轮372之间的输送带371的上表面即为上述的载货平台373。当传动装置沿货物传输支架31移动时,输送带371静止,当需要转运货物200时,启动输送带371。可选地,第三驱动装置24可包括步进电机或伺服电机,用于驱动皮带轮372转动。
76.当需要在不同的平台之间转运货物200时,仅需通过第三驱动装置24驱动皮带轮372转动,进而通过输送带371移动货物200,从而将货物200运离载货平台373,或者,将货物200从其他平台运输至载货平台373上。
77.上文主要描述了本公开提供的货物传输设备100的传送机构30的优选示例,在下文中,将结合附图4至图7详细阐述货物缓存机构20的结构特征的示例,具体如下:
78.在相关技术中,当从无人机上卸下货物200后,通过货物传输设备100将货物200传送至货物200取放位置,在当前货物200取放完成后,才可进行下一次货物200的交付,因而工作效率低,无法适用于物流量较大的场合。
79.为了解决上述的问题,提高货物200运输的效率,在本公开的一种实施方式中,如图2和图4所示,货物传输设备100还包括起降平台10和货物缓存机构20。起降平台10具有用于供无人机停放的停放区11,停放区11内形成有供货物200从无人机装卸的装卸口12。货物缓存机构20包括运输装置21和用于与楼宇物流系统衔接的货物缓存平台22。货物缓存平台22包括货物交接口221和多个货物存储区222。运输装置21用于在货物交接口221和货物存储区222之间运输货物200。传送装置32在第一驱动装置33的驱动下,在装卸口12和货物交接口221之间传送货物200。
80.通过设置货物缓存机构20,当从无人机上卸载货物200时,传送装置32将货物200运输至货物交接口221处,通过运输装置21将货物200运输至货物存储区222,与此同时传送装置32立即返回运输下一个货物200,可通过楼宇物流系统将存放在货物存储区222的货物200配送至最终的货物配送点;当将货物装载上无人机时,楼宇物流系统将用户需要配送或邮寄的货物200运输至货物存储区222,再通过运输装置21将货物200从货物存储区222运输至货物交接口221,然后通过传送装置32将货物200运输至无人机上。因此,通过设置货物缓存机构20使得货物传输设备100具有货物缓存功能,增加了货物200的运输路径,使得整个货物传输设备100的运输能够更强,提高了货物200的运输效率。
81.为了便于楼宇物流系统与货物缓存平台22之间运输货物200,在本公开的一种实施方式中,如图1所示,货物传输设备100还包括货物传输通道50,通过该货物传输通道50将货物200运输至各个配送点,或,从各个取货点将货物200运输至货物缓存平台22处。
82.在本公开中,当无人机停放在起降平台10上时,需要将货舱的进出口准确的定位在起降平台10的装卸口12处,这对无人机的降落精度有较高要求。在实际应用中,无人机降落后与装卸口12之间难免会存在误差,则需要对无人机降落后的位置进行调整。如图1和图2所示,起降平台10包括推正机构14,推正机构14安装在起降平台10的上方,用于将无人机移动到停放区11以对齐装卸口12。
83.这里需说明的是,为了便于无人机在起降平台10上顺利降落和移动,在无人机降
落前,上文中所提及的载货平台373可以被移动至与起降平台10的上表面平齐的位置,以恢复起降平台10的完整性。
84.作为本公开的一种示例性实施方式,继续参照图1和图2所示,推正机构14包括两个x向推杆、两个y向推杆和推正驱动装置,起降平台10上形成有分别位于装卸口12沿y向的两侧的x向滑槽、以及分别位于装卸口12沿x向的两侧的y向滑槽,x向推杆的两端分别滑动配合于y向滑槽,并且两个x向推杆分别到装卸口12的中心点的垂直距离相等,y向推杆的两端分别滑动配合于x向滑槽,并且两个y向推杆分别到装卸口12的中心点的垂直距离相等,推正驱动装置用于驱动x向推杆和y向推杆运动。这里,推正驱动装置可以是直线驱动缸,通过传动机构与x向推杆和y向推杆相连,推正驱动装置和传动机构可以布置在起降平台10的下方(如图2所示),以减少起降平台10上方的构件,但在其他实施方式中推正驱动装置也可以布置在起降平台10的上方。
85.上述x向推杆和y向推杆构成围绕装卸口12的“井”字形,其中间可以限定出无人机的停放区11,当无人机降落后,推正驱动装置可以驱动x向推杆和/或y向推杆作同步、等速、反向运动,以使无人机货舱的进出口对齐该装卸口12,可以降低对无人机的降落精度要求。
86.在本公开的其他实施方式中,推正机构14也可以为其他结构形式,本公开对此不作限制。
87.本公开提供的一种实施方式中,货物传输设备100还包括货箱传输通道和用于遮盖起降平台10的顶盖机构,该顶盖机构包括防雨顶盖13和顶盖驱动装置,防雨顶盖13具有第一盖门和第二盖门,顶盖驱动装置致动第一盖门和第二盖门相向移动,以封闭装卸口12,保护起降平台10;顶盖驱动装置致动第一盖门和第二盖门相互背离移动,以露出装卸口12。在装载或卸载过程中,控制顶盖驱动装置提前打开顶盖,以便于无人机的停放。无人机飞走后,防雨顶盖13关闭,对保护防雨顶盖13下的货物传输设备100。
88.在本公开中对运输装置21的具体结构不作限制,例如,运输装置21可为运载小车,在货物交接口221和货物存储区222之间运输货物200。在本公开中的一种实施方式中,如图4所示,运输装置21包括第四驱动装置、辊筒211和沿第一方向延伸的缓存支架23。多个辊筒211沿第一方向布置,并且辊筒211的两端可转动地连接在缓存支架23上。第四驱动装置用于驱动多个辊筒211转动,辊筒211的外周面共同形成货物缓存平台22,因此,货物存储区222沿辊筒211的布置方向依次设置。第四驱动装置用于驱动辊筒211转动,以在货物交接口221和货物存储区222之间运输货物200。第四驱动装置可包括步进电机或伺服电机。
89.当有货物200需要存放到货物存储区222时,第二驱动装置36启动,多个辊筒211同步转动,使得货物200向远离货物交接口221的方向运动至下一个货物存储区222,从而使得新运过来的货物200可存放至靠近货物交接口221的货物存储区222。
90.进一步地,如图4所示,货物缓存机构20还包括第三驱动装置24和一个或多个隔板25。相邻的两个货物存储区222之间设置有隔板25。隔板25可升降地设置于缓存支架23并且设置于辊筒211之间,隔板25可沿两个辊筒211之间的间隙升降。第三驱动装置24用于驱动隔板25升降。
91.通过设置隔板25可将不同的货物存储区222分隔开,防止不同的存储区的货物200发生干涉。而且,当隔板25升起后,辊筒211转动时,由于隔板25的抵挡,位于隔板25之间的货物200不会发生移动,因此,可根据需要调整货物200在货物缓存平台22上的位置,或,保
持货物200的位置不调整。当隔板25落下后,可在不同的货物200储存区之间调整货物200的位置。
92.为了防止货物200从货物缓存平台22上掉落,在本公开的一种实施方式中,货物缓存机构20还包括均固定设置于缓存支架23的第一固定挡板28和第二固定挡板29。第一固定挡板28和货物交接口221分别设置于货物缓存平台22的沿第一方向的两端。第二固定挡板29沿第一方向延伸,并且第二固定挡板和活动挡板27分别设置在辊筒211的沿自身轴线方向两侧。可选地,辊筒211的轴线方向与该第一方向垂直。
93.在本公开的一种实施方式中,第一方向可沿水平方向,货物传输支架31可沿竖直方向延伸,传送装置32沿货物传输支架31上下移动,从而能够将设置在楼顶的无人机的自动机场的货物200向下运输。起降平台10可以设置在建筑物的顶端,竖直的传送通道可以依附于建筑物的墙面等结构安装,相比较于曲折的传送通道,竖直的传送通道设计难度低,稳定性更高,有利于传送货物200的流畅性。
94.为了便于与楼宇物流系统之间传递货物200,在本公开的一种实施方式中,如图5
‑
7所示,货物缓存机构20还包括活动挡板27组件,货物缓存平台22还设置有用于与楼宇物流系统传递货物200的货物转运口223。活动挡板27组件包括第五驱动装置26和沿多个货物存储区222的布置方向延伸的活动挡板27。活动挡板27可活动地设置于货物转运口223,以在第五驱动装置26的驱动下,打开或关闭货物转运口223。
95.当辊筒211转动时,活动挡板27升起,以限制货物200的位置,防止货物200从货物转运口223掉落;当楼宇物流系统需要将货物200从货物存储区222运走或者将货物200运输至货物存储区222,则将活动挡板27降下。
96.在本公开中对活动挡板27具体的运动形式不作限制,例如,活动挡板27可铰接在缓存支架23上,活动挡板27转动时打开或关闭货物转运口223。在本公开的一种实施方式中,如图5
‑
7所示,活动挡板27可升降地设置于缓存支架23。第五驱动装置26包括第五驱动件261和凸轮组件,凸轮组件包括相配合的凸轮262和推动件263,第五驱动件261固定于缓存支架23且用于驱动凸轮262转动,推动件263绕自身转轴可转动地与活动挡板27连接。第五驱动件261可为步进电机或伺服电机。
97.通过活动挡板27的升降来打开或关闭货物转运口223,可减少活动挡板27所需的运动空间,不会占用货物200的运输空间,便于货物缓存平台22与楼宇物流系统之间传递货物200。当需要升降活动挡板27时,启动第五驱动件261,第五驱动件261带动凸轮262转动,通过凸轮262和推动件263之间的型面配合,带动推动件263向上或向下移动,推动件263带动活动挡板27升降。通过凸轮262和推动件263的配合,便于实现活动挡板27的上下移动的往复运动。
98.为了增加货物缓存机构20的缓存能力,提高货物200的运输效率,在本公开的一种实施方式中,如图2和图4所示,货物传输设备100包括多个货物缓存机构20,多个货物缓存机构20分别布置在传送装置32的两侧,多个货物缓存机构20可增大能够缓存的货物200的数量,而且,布置在传送装置32两侧,可将两侧的货物缓存机构20分成货物200向无人机运输的货物200上行缓存区以及从无人机向下运输的货物200下行缓存区。当传送装置32将货物200从无人机上运输至货物200下行缓存区后,能够顺便将货物200下行缓存区的货物200带回至无人机处,从而能够提高货物200的运输效率。
99.可选地,在本公开的一种实施方式中,货物传输设备100中设置有两个货物缓存机构20,分别设置在传送装置32的两侧,其中一个可作为货物200向无人机运输的货物200上行缓存区,一个可作为从无人机向下运输的货物200下行缓存区。
100.可以理解的是,在其他实施方式中,货物传输设备100中可设置更多的货物缓存机构20,沿上下方向分别布置在传送装置32的两侧。
101.在本公开中对第一驱动装置33的具体结构不作限制,在一种实施方式中,如图3所示,第一驱动装置33包括第一驱动器331、传动带332组件和配重块333。传动带332组件包括传动带332和沿传送装置32的移动方向间隔设置的两个带轮,传动带332套设于两个带轮上。第一驱动器331用于驱动带轮转动,位于带轮其中一侧的传动带332与传送装置32固定连接,另一侧的传动带332固定连接有配重块333。
102.由于传动带332上用于运输货物200的一侧负重较大,在传动带332的另一侧上设置配重块333,可减低第一驱动器331的驱动负载,保证传送机构30运行的稳定可靠。
103.第一驱动器331可包括电机,电机带动带轮转动。在其他实施方式中,第一驱动装置33还可构造成链条传动机构,或,丝杠螺母机构。
104.根据本公开的另一方面,还提供了一种建筑物,该建筑物包括建筑物主体和安装在该建筑物主体上的上述的货物传输设备100。起降平台10位于建筑物的楼顶,楼宇物流系统与建筑物的户内空间对应设置。该建筑物可以是商场、工厂、仓库、写字楼或者居民楼等,这样,无人机卸载的货物200可以通过传送机构30和楼宇物流系统被传递至室内,也可以直接从室内将货物200传送至楼顶,通过无人机进行配送,这样可以节约大量的人力成本,提高物流配送的效率。
105.以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
106.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
107.此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1