SMT上下板机接驳用自动引导运输车的制作方法
smt上下板机接驳用自动引导运输车
技术领域
1.本实用新型运输装置领域,涉及自动引导运输车,尤其是smt上下板机接驳用自动引导运输车。
背景技术:
2.自动引导运输车简称agv,agv作为联系和调节离散型物流管理系统中必要的自动化装卸手段,得以迅猛的发展,被广泛运用在各类加工领域当中。
3.原始技术中针对smt上下板机的原料运输过程一般采用人工搬运的方式进行,随着agv技术的发展,也有采用agv进行转运的工艺产生,但在agv应用在smt上下板机的过程中尚有一个问题没有解决。
4.smt上下板机一般是上部进料下部出料,由于原始技术中smt上下板机的进出料工序是由人工完成的,为便于操作人员拿取出料位置的容器防止进料位置将出料位置遮挡,现有大部分的smt上下板机的进料位置和出料位置并不在一个竖直平面内,即出料位置的长度更长由进料位置的水平投影位置伸出。
5.目前所用的和smt上下板机接驳的agv如专利号为2020207716564,以及专利号为2017110026891的专利所示,其结构一般包括运载车本体,运载车本体上部安装有升降组件,盛装有物料的容器先提升至上位位置,待进料完成后升降组件移动至下位位置用于承接smt上下板机导出的空置容器。但由于现有smt上下板机的结构限制,当agv和smt上下板机的出料位置对应时,其升降组件和smt上下板机的进料位置存在一定的间隙,而该间隙尚无法克服需要人工来进行搬移。
技术实现要素:
6.本实用新型的目的在于克服现有技术的不足,提供一种在进料时可将平移组件探出,使得平移平台和smt上下板机进料侧接驳,在出料时可将平移组件收回,使得平移平台和smt上下板机出料侧接驳的smt上下板机接驳用自动引导运输车。
7.本实用新型采取的技术方案是:
8.smt上下板机接驳用自动引导运输车,包括运输车本体,该运输车本体上方安装有基座,所述基座上方安装有两个立式框架,两个立式框架对称间隔安装,所述的两个立式框架内均安装有升降组件,在两个立式框架之间的间隙内安装有和升降组件装配的升降台,其特征在于:所述升降台内安装有平移组件,该平移组件包括平移平台,所述的平移平台内安装有传动组件,在使用状态下传动组件和平移平台能同步沿水平方向由两个立式框架之间向外侧移出。
9.进一步的,所述平移组件还包括平移电机,导轨和两组导轮,每组导轮内均包括沿水平方向并排间隔安装的多个导轮,每个导轮的角速度方向和平移平台的移动方向同向,所述的两组导轮对称安装在升降平台的两侧,电机安装在两组导轮之间,所述电机的输出端和平移平台联动,用于驱动平移平台沿水平方向移动,所述平移平台的底部两侧对称安
装有导轨,导轨内嵌装有同侧的一组导轮。
10.进一步的,所述平移平台的移动方向和传动组件的传送方向同向设置。
11.进一步的,所述平移平台内安装有夹持组件,夹持组件包括两个夹持板,所述的两个夹持板成对设置,以传动组件的传送方向为长向,与传送方向同一水平面内向垂直方向设置为宽向,两个夹持板对称安装在传送组件的宽向两侧,所述的两个夹持板的夹持位置位于传动组件上方,在合并状态下用于将传送组件传输的板式材料紧密夹持。
12.进一步的,所述夹持组件还包括滑块,宽向导轨和接触传感器,所述的宽向导轨安装在传动组件下方,滑块和宽向导轨滑动配合,滑块的上端部一体制出所述的夹持板,两个夹持板相对的同侧端面内安装有所述的接触传感器。
13.本实用新型的优点和积极效果是:
14.1、本实用新型中,保留运输车本体和升降组件的结构,通过升降组件承载升降台的位置变化,使其在进料和出料过程中均和smt上下板机的位置对应。在此基础上,其安装的平移组件中的平移平台可向外部探出,使其实现和smt上下板机进料位置的接驳,并通过承载的传动组件完成容器的输送。
15.2、本实用新型中,平移组件中的电机为平移平台的移动提供动力,导轨和导轮的配合即限制其宽度方向的位移,又可使平移平台的探出过程更为稳定。
16.3、本实用新型中,平移平台的移动方向和传动组件的传送方向重合,使得运输车本体在进料和出料过程中无需通过自身转动进行调节。即节约了进出料时自动引导运输车所占的空间也简化了动作执行流程的控制。
17.4、本实用新型中,由于目前smt上下板机根据生产的产品不同其本身的宽度尺寸也有差异,常见的包括300mm,500mm等多个尺寸。因此,在平移平台内安装的夹持组件可有效提升自动引导运输车的适应性,在实际使用中可根据所需的不同宽度尺寸来进行调整。
18.5、本实用新型中,夹持组件采用滑块和宽向导轨进行配合,来实现对两个夹持板之间相对位置的调整,接触传感器则用于控制两个夹持板的夹紧力,当两个夹持板内的接触传感器均和物料接触时,则视为其与物料已稳定夹持。
附图说明
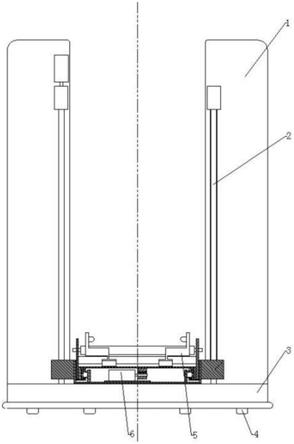
19.图1为本实用新型的结构示意图;
20.图2为图1中运输车本体,基座和升降组件部分的结构示意图;
21.图3为图2中a部的局部放大图;
22.图4为图2的俯视图;
23.图5为图4中b
‑
b向的局部剖视图;
24.图6为本实用新型的使用状态图。
具体实施方式
25.下面结合实施例,对本实用新型进一步说明,下述实施例是说明性的,不是限定性的,不能以下述实施例来限定本实用新型的保护范围。
26.smt上下板机接驳用自动引导运输车,包括运输车本体4,该运输车本体上方安装有基座3,所述基座上方安装有两个立式框架1,两个立式框架对称间隔安装,所述的两个立
式框架的外壳10内均安装有升降组件2,在两个立式框架之间的间隙11内安装有和升降组件装配的升降台23,本实用新型中,所述升降台内安装有平移组件6,该平移组件包括平移平台,所述的平移平台内安装有传动组件,在使用状态下传动组件和平移平台能同步沿水平方向由两个立式框架之间向外侧移出。
27.本实施例中,所述升降组件包括升降导柱21,丝杠和升降电机20。升降电机的输出端和丝杠一端同轴连接,丝杠和升降导柱平行穿装在同侧的两根升降导柱之间,所述丝杠外部和升降平台旁侧安装有升降块22通过螺纹进行配合。
28.本实施例中,所述平移组件还包括平移电机64,齿轮63,齿条62,导轨67和两组导轮66,其中平移平台可采用“工”字型结构,即采用两个侧板60和一个隔板65一体安装的结构。两个侧板相互平行间隔设置,在中部沿水平方向安装有隔板,隔板下方两侧的侧板内安装有导轨,每个导轨内均安装有一组导轮,一组包括上下设置的两排,每排包括多个导轮。在两个导轨之间的升降平台上端面内安装有所述的电机,电机的输出端安装有齿轮,平移平台的底面安装有齿条,该齿条和电机输出端安装的齿轮啮合实现动力的输出。
29.本实施例中,优选的在平移平台移出位置一侧的端面内也安装一个接触传感器,当其和smt上下板机的进料位置接触时,则视为移动到位可通过传送组件将物料输出。
30.本实施例中,所述平移平台的移动方向和传动组件的传送方向同向设置。
31.本实施例中,所述平移平台内安装有夹持组件5,夹持组件包括两个夹持板50,所述的两个夹持板成对设置,以传动组件的传送方向为长向,与传送方向同一水平面内向垂直方向设置为宽向,两个夹持板对称安装在传送组件的宽向两侧,所述的两个夹持板的夹持位置位于传动组件上方,在合并状态下用于将传送组件传输的板式材料紧密夹持。
32.本实施例中,所述的传送组件不采用传送带这种将水平面完全遮蔽的传送装置,而是采用间隔设置的多个传送辊61来实现传送过程,夹持组件则由传送辊径向之间的间隙伸出至上方位置。进一步的,传送辊可采用每根均独立驱动的滚筒;也可采用通过链条或皮带实现的一个主动,其余从动的传送方式,链条或皮带只需不遮挡夹持板的移动位置即可。
33.本实施例中,所述夹持组件还包括滑块53,宽向导轨52和接触传感器51,所述的宽向导轨安装在传动组件下方,滑块和宽向导轨滑动配合,滑块的上端部一体制出所述的夹持板,两个夹持板相对的同侧端面内安装有所述的接触传感器。
34.本实用新型的使用过程是:
35.本实用新型使用时,如图6所示,在向smt上下板机8输出物料7时,先通过升降组件将升降平台即平移平台提升至进料位置的水平高度,之后在平移电机的作用下平移平台向smt上下板机一侧移出,待其接触传感器触发后,则停止平移并通过传动组件输出物料。待物料输出后,则将平移平台回收至初始位置,之后通过升降组件下移至低位位置,待物料内板式材料被smt上下板机提取后,空载的物料则由smt上下板机向自动引导运输车输出实现回收,待回收完毕后,则视为一次物料运输完成,自动引导运输车回程运动,直至下一次输送。
36.本实用新型中,保留运输车本体和升降组件的结构,通过升降组件承载升降台的位置变化,使其在进料和出料过程中均和smt上下板机的位置对应。在此基础上,其安装的平移组件中的平移平台可向外部探出,使其实现和smt上下板机进料位置的接驳,并通过承载的传动组件完成容器的输送。
37.本实用新型中,平移组件中的电机为平移平台的移动提供动力,导轨和导轮的配合即限制其宽度方向的位移,又可使平移平台的探出过程更为稳定。
38.本实用新型中,平移平台的移动方向和传动组件的传送方向重合,使得运输车本体在进料和出料过程中无需通过自身转动进行调节。即节约了进出料时自动引导运输车所占的空间也简化了动作执行流程的控制。
39.本实用新型中,由于目前smt上下板机根据生产的产品不同其本身的宽度尺寸也有差异,常见的包括300mm,500mm等多个尺寸。因此,在平移平台内安装的夹持组件可有效提升自动引导运输车的适应性,在实际使用中可根据所需的不同宽度尺寸来进行调整。
40.本实用新型中,夹持组件采用滑块和宽向导轨进行配合,来实现对两个夹持板之间相对位置的调整,接触传感器则用于控制两个夹持板的夹紧力,当两个夹持板内的接触传感器均和物料接触时,则视为其与物料已稳定夹持。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1