一种刀叉包装机的制作方法
1.本实用新型涉及包装机技术领域,具体为一种刀叉包装机。
背景技术:
2.刀叉包装机是专用于塑胶刀叉餐具包装的设备,与人工包装相比较,刀叉包装机能够节省大量的人工和时间成本。
3.现有的刀叉包装机只能对单一的刀叉包装,无法实现大批量同时包装,包装效率较低,同时包装过程仍然需要人工配合,无法实现全自动化包装,同时现有的刀叉包装机抓握手抓握不够稳定,在运输过程中,运料存在掉落的问题。
4.为此,提出一种刀叉包装机。
技术实现要素:
5.本实用新型的目的在于提供一种刀叉包装机,以解决上述背景技术中提出现有的刀叉包装机只能对单一的刀叉包装,无法实现大批量同时包装,包装效率较低,同时包装过程仍然需要人工配合,无法实现全自动化包装,同时现有的刀叉包装机抓握手抓握不够稳定,在运输过程中,运料存在掉落的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种刀叉包装机,包括箱体,所述箱体的上方活动安装有载物盘,所述箱体的后侧活动安装有第一传送带,所述第一传送带的上方固定安装有第一活动梁,所述第一活动梁上活动安装有第一活动臂架,所述第一活动臂架的底部活动安装有第一抓握爪,所述第一活动梁的右侧固定安装有滑轨,所述滑轨上活动安装有滑车,所述滑车上固定安装有第二活动梁,所述第二活动梁的底部活动安装有第二活动臂架,所述第二活动臂架的底部活动安装有第二抓握爪,所述第二抓握爪的右侧开设有送料槽,所述送料槽的右侧活动安装有第二传送带,所述第二传送带上固定安装有封包机,所述载物盘的底部固定安装有底板,所述底板的顶部中间位置处固定安装有中挂轴,所述中挂轴的一侧固定安装有挡柱,所述第一抓握爪上固定安装有套筒,所述套筒的外侧固定安装有夹板,所述夹板的一侧活动安装有挡块,所述挡块的底部固定安装有吸盘。
7.通过采用上述技术方案,包装物料由第一传送带送入,第一抓握爪抓握住物料,第一活动臂架在第一活动梁滑动,将第一抓握爪送至载物盘的上方,第一抓握爪下降将物料送进载物盘,运输结束后第一抓握爪和第一活动臂架复位继续抓握物料,重复这一过程,箱体上的载物盘负责承接第一抓握爪送入的物料,第二抓握爪底部的载物盘负责送出物料,这一过程同步进行,当箱体上的载物盘上的物料堆叠满时,第二抓握爪底部的载物盘上的物料正好全部送出,此时双方物料盘互换位置,第二活动臂架上安装有第二抓握爪,第二抓握爪将载物盘上的物料送入送料槽,进入送料槽上的物料由第二传送带送入封包机,完成包装。
8.优选的,所述第一抓握爪共设置有两组,两组第一抓握爪均匀安装在第一活动臂
架的底部,所述第一活动臂架与第一活动梁滑动连接。
9.通过采用上述技术方案,包装物料由第一传送带送入,第一抓握爪抓握住物料,第一活动臂架在第一活动梁滑动,将第一抓握爪送至载物盘的上方,第一抓握爪下降将物料送进载物盘,运输结束后第一抓握爪和第一活动臂架复位继续抓握物料,重复这一过程。
10.优选的,所述载物盘共设置有四组,其中两组载物盘均匀安装在箱体的顶部,另外两组载物盘均匀安装在第二抓握爪的底部。
11.通过采用上述技术方案,箱体上的载物盘负责承接第一抓握爪送入的物料,第二抓握爪底部的载物盘负责送出物料,这一过程同步进行,当箱体上的载物盘上的物料堆叠满时,第二抓握爪底部的载物盘上的物料正好全部送出,此时双方物料盘互换位置。
12.优选的,所述滑车与滑轨滑动连接,所述第二活动臂架与第二活动梁滑动连接。
13.通过采用上述技术方案,第二活动臂架上安装有第二抓握爪,第二抓握爪将载物盘上的物料送入送料槽,进入送料槽上的物料由第二传送带送入封包机,完成包装。
14.优选的,所述挡柱与夹板均设置有若干组,若干组挡柱均匀安装在底板的顶部,若干组夹板均匀安装在第一抓握爪上,所述第一抓握爪与载物盘卡合连接。
15.通过采用上述技术方案,两组挡柱之间形成一个卡槽,物料可以卡住放置在卡槽内部,同时多组物料可以相互堆叠,一组卡槽内可以放置多组物料,若干组挡柱之间形成若干组卡槽,从而一次能堆叠大量的物料,实现大批量包装。
16.优选的,所述挡块共设置有三组,三组挡块均匀安装在夹板上,所述挡块在夹板上伸缩活动。
17.通过采用上述技术方案,物料进入两组夹板之间,吸盘吸住物料的柄端,同时挡块伸出托住物料,避免物料掉落,第一抓握爪需要卸料时,挡块收回,吸盘关闭,物料在重力的作用下掉落。
18.与现有技术相比,本实用新型的有益效果是:
19.1、实现了全自动包装,物料的送入、转运、打包均自动化完成,包装无需人工配合,同时能够一次性对大批量的物料进行打包,大大提高了包装的效率,同时节省了生产人工成本,节省了生产时间,加快了生产速度,使用更加方便高效;
20.2、在第一抓握爪的抓握方式下加装吸盘,吸住物料的一端,能够使得物料在转运过程中抓握更稳定,避免物料在运输过程中掉落,有利于包装有序高效的进行,便于提高整体的包装生产效率,减少维护整修压力,便于生产生活使用。
附图说明
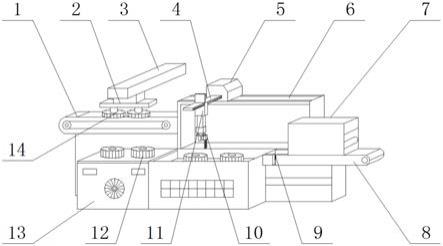
21.图1为本实用新型的主体结构示意图;
22.图2为本实用新型的载物盘结构示意图;
23.图3为本实用新型的第一抓握爪倒置结构示意图;
24.图4为本实用新型的夹板结构示意图。
25.图中:1、第一传送带;2、第一活动臂架;3、第一活动梁;4、第二活动梁;5、滑车;6、滑轨;7、封包机;8、第二传送带;9、送料槽;10、第二抓握爪;11、第二活动臂架;12、载物盘;13、箱体;14、第一抓握爪; 15、中挂轴;16、底板;17、挡柱;18、套筒;19、夹板;20、挡块;21、吸盘。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.请参阅图1至图4,本实用新型提供一种技术方案:一种刀叉包装机,如图1至图4所示,包括箱体13,箱体13的上方活动安装有载物盘12,箱体 13的后侧活动安装有第一传送带1,第一传送带1的上方固定安装有第一活动梁3,第一活动梁3上活动安装有第一活动臂架2,第一活动臂架2的底部活动安装有第一抓握爪14,第一活动梁3的右侧固定安装有滑轨6,滑轨6 上活动安装有滑车5,滑车5上固定安装有第二活动梁4,第二活动梁4的底部活动安装有第二活动臂架11,第二活动臂架11的底部活动安装有第二抓握爪10,第二抓握爪10的右侧开设有送料槽9,送料槽9的右侧活动安装有第二传送带8,第二传送带8上固定安装有封包机7,载物盘12的底部固定安装有底板16,底板16的顶部中间位置处固定安装有中挂轴15,中挂轴15的一侧固定安装有挡柱17,第一抓握爪14上固定安装有套筒18,套筒18的外侧固定安装有夹板19,夹板19的一侧活动安装有挡块20,挡块20的底部固定安装有吸盘21。
28.通过采用上述技术方案,包装物料由第一传送带1送入,第一抓握爪14 抓握住物料,第一活动臂架2在第一活动梁3滑动,将第一抓握爪14送至载物盘12的上方,第一抓握爪14下降将物料送进载物盘12,运输结束后第一抓握爪14和第一活动臂架2复位继续抓握物料,重复这一过程,箱体13上的载物盘12负责承接第一抓握爪14送入的物料,第二抓握爪10底部的载物盘12负责送出物料,这一过程同步进行,当箱体13上的载物盘12上的物料堆叠满时,第二抓握爪10底部的载物盘12上的物料正好全部送出,此时双方物料盘12互换位置,第二活动臂架11上安装有第二抓握爪10,第二抓握爪10将载物盘12上的物料送入送料槽9,进入送料槽9上的物料由第二传送带8送入封包机7,完成包装。
29.具体的,如图1所示,第一抓握爪14共设置有两组,两组第一抓握爪14 均匀安装在第一活动臂架2的底部,第一活动臂架2与第一活动梁3滑动连接。
30.通过采用上述技术方案,包装物料由第一传送带1送入,第一抓握爪14 抓握住物料,第一活动臂架2在第一活动梁3滑动,将第一抓握爪14送至载物盘12的上方,第一抓握爪14下降将物料送进载物盘12,运输结束后第一抓握爪14和第一活动臂架2复位继续抓握物料,重复这一过程。
31.具体的,如图1所示,载物盘12共设置有四组,其中两组载物盘12均匀安装在箱体13的顶部,另外两组载物盘12均匀安装在第二抓握爪10的底部。
32.通过采用上述技术方案,箱体13上的载物盘12负责承接第一抓握爪14 送入的物料,第二抓握爪10底部的载物盘12负责送出物料,这一过程同步进行,当箱体13上的载物盘12上的物料堆叠满时,第二抓握爪10底部的载物盘12上的物料正好全部送出,此时双方物料盘12互换位置。
33.具体的,如图1所示,滑车5与滑轨6滑动连接,第二活动臂架11与第二活动梁4滑动连接。
34.通过采用上述技术方案,第二活动臂架11上安装有第二抓握爪10,第二抓握爪10将载物盘12上的物料送入送料槽9,进入送料槽9上的物料由第二传送带8送入封包机7,完
成包装。
35.具体的,如图2和图3所示,挡柱17与夹板19均设置有若干组,若干组挡柱17均匀安装在底板16的顶部,夹板19均匀安装在第一抓握爪14上,第一抓握爪14与载物盘12卡合连接。
36.通过采用上述技术方案,两组挡柱17之间形成一个卡槽,物料可以卡住放置在卡槽内部,同时多组物料可以相互堆叠,一组卡槽内可以放置多组物料,若干组挡柱17之间形成若干组卡槽,从而一次能堆叠大量的物料,实现大批量包装。
37.具体的,如图4所示,挡块20共设置有三组,三组挡块20均匀安装在夹板19上,挡块20在夹板19上伸缩活动。
38.通过采用上述技术方案,物料进入两组夹板19之间,吸盘21吸住物料的柄端,同时挡块20伸出托住物料,避免物料掉落,第一抓握爪14需要卸料时,挡块20收回,吸盘21关闭,物料在重力的作用下掉落。
39.工作原理:包装物料由第一传送带1送入,第一抓握爪14抓握住物料,第一活动臂架2在第一活动梁3滑动,将第一抓握爪14送至载物盘12的上方,第一抓握爪14下降将物料送进载物盘12,运输结束后第一抓握爪14和第一活动臂架2复位继续抓握物料,重复这一过程,箱体13上的载物盘12 负责承接第一抓握爪14送入的物料,第二抓握爪10底部的载物盘12负责送出物料,这一过程同步进行,当箱体13上的载物盘12上的物料堆叠满时,第二抓握爪10底部的载物盘12上的物料正好全部送出,此时双方物料盘12 互换位置,第二活动臂架11上安装有第二抓握爪10,第二抓握爪10将载物盘12上的物料送入送料槽9,进入送料槽9上的物料由第二传送带8送入封包机7,完成包装。
40.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“坚直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
41.此外,“第一”、“第二”术语仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。此外,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
42.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1