一种洗衣机箱体自动悬挂装置的制作方法
1.本实用新型涉及洗衣机生产技术领域,尤其涉及一种洗衣机箱体自动悬挂装置。
背景技术:
2.在以往的洗衣机生产过程中,通常依靠人力将洗衣机的箱体由流水线的输送机构抱送至悬挂链上,生产效率较低,且按照单班产能为2500台计算,预计一班次员工所需搬动的箱体总重量为15吨
‑
29吨,劳动强度极大。更为严重的是,在整个作业过程中,还存在箱体脱落砸伤人的安全隐患。
3.为解决上述问题,目前有技术方案提出通过上件机械手来悬挂洗衣机箱体,其主要工作过程为:当箱体移动到悬挂链挂件工位后,悬挂链运行挂钩挂住箱体,下方同步机构勾住箱体保证箱体不会往后倾斜,给下一个箱体的工件留出足够的空间,上件机械手抓取箱体并将箱体送至挂件位置进行挂箱,从而实现箱体悬挂。然而,由于上件机械手的成本较高,所以该种方案的经济性较差。
4.基于此,亟需一种洗衣机箱体自动悬挂装置,用以解决上述问题。
技术实现要素:
5.本实用新型的目的在于提供一种洗衣机箱体自动悬挂装置,能够实现洗衣机箱体的自动悬挂,生产效率高,且装置结构简单、成本低,具有良好的经济性。
6.为达此目的,本实用新型采用以下技术方案:
7.一种洗衣机箱体自动悬挂装置,用于悬挂位于流水线输送机构上的洗衣机箱体,所述洗衣机箱体自动悬挂装置包括:
8.位置传感器,设置在所述流水线输送机构的末端,以检测所述洗衣机箱体是否到达预设位置;
9.悬挂机构,设置在所述流水线输送机构的上方并与所述位置传感器通讯连接,所述悬挂机构包括悬挂链和可移动地安装在所述悬挂链上的挂具,所述悬挂机构被配置为在所述洗衣机箱体到达所述预设位置后,通过所述挂具挂接所述洗衣机箱体,并使所述挂具沿所述悬挂链移动以提升所述洗衣机箱体。
10.可选地,所述悬挂链包括水平段和由所述水平段的一端倾斜向上延伸形成的倾斜段,且所述水平段和所述倾斜段的连接位置位于所述预设位置的正上方。
11.可选地,所述水平段和所述倾斜段之间的夹角α大于等于145
°
且小于180
°
。
12.可选地,所述洗衣机箱体的侧面具有箱体开口;
13.所述挂具包括竖杆和挂钩,所述竖杆的上端与所述悬挂链连接,所述竖杆的下端与所述挂钩连接,所述挂钩被配置为在所述洗衣机箱体到达所述预设位置后与所述箱体开口相钩连。
14.可选地,所述挂具还包括u形架,所述u形架连接在所述竖杆的下端且开口朝下;
15.所述u形架包括两个侧臂,两个所述侧臂被配置为在所述挂钩与所述箱体开口相
钩连时,分别与位于所述箱体开口两侧的所述洗衣机箱体抵接。
16.可选地,所述流水线输送机构包括固定架,所述固定架上安装有输送带,所述输送带用于传送所述洗衣机箱体;
17.所述洗衣机箱体自动悬挂装置还包括限位件,所述限位件安装在所述固定架上,所述限位件被配置为在所述洗衣机箱体到达所述预设位置后与所述洗衣机箱体抵接,以限制所述洗衣机箱体沿所述输送带继续移动。
18.可选地,所述限位件包括设置在所述输送带上方的第一限位杆,沿所述输送带的传送方向,所述第一限位杆位于所述洗衣机箱体的下游,且所述第一限位杆沿所述输送带的宽度方向设置。
19.可选地,所述限位件还包括位于所述输送带上方的第二限位杆,所述第二限位杆沿所述输送带的长度方向设置,且所述第二限位杆安装在所述第一限位杆的轴向的第一侧以形成l形限位结构;
20.所述洗衣机箱体自动悬挂装置还包括推杆,所述推杆设置在所述第一限位杆轴向的第二侧,所述推杆被配置为在所述洗衣机箱体到达所述预设位置后推动所述洗衣机箱体移动,使所述洗衣机箱体与所述第二限位杆抵接。
21.可选地,所述位置传感器为光电感应器。
22.可选地,沿所述悬挂链的长度方向,所述悬挂链上间隔安装有多个所述挂具。
23.本实用新型的有益效果:
24.本实用新型提供了一种洗衣机箱体自动悬挂装置,通过设置位置传感器可检测洗衣机箱体的位置,并在洗衣机箱体到达预设位置后,将信号传送给悬挂机构,进而通过运行悬挂链使挂具也移动到预设位置,将挂具挂接在洗衣机箱体上;之后,通过继续运行悬挂链,可将洗衣机箱体升起,进而将洗衣机箱体从流水线输送机构上移走,最终实现洗衣机箱体的自动悬挂。整体来看,上述工作过程无需人工参与,生产效率高,减少了安全隐患。同时,该洗衣机箱体自动悬挂装置的结构简单、成本低,具有良好的经济性。
附图说明
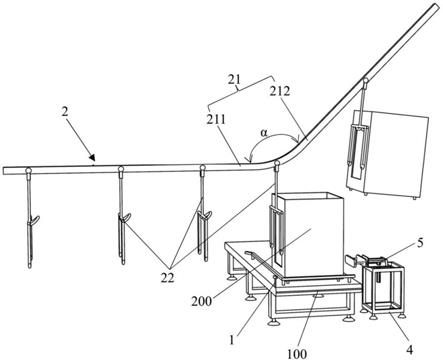
25.图1是本实用新型实施例提供的洗衣机自动悬挂装置的整体结构示意图;
26.图2是本实用新型实施例提供的洗衣机自动悬挂装置的局部结构示意图;
27.图3是本实用新型实施例提供的洗衣机自动悬挂装置中挂具的结构示意图。
28.图中:
29.100、流水线输送机构;101、固定架;102、输送带;200、洗衣机箱体;201、箱体开口;
30.1、位置传感器;
31.2、悬挂机构;21、悬挂链;211、水平段;212、倾斜段;22、挂具;221、竖杆;222、挂钩;223、u形架;2231、侧臂;2232、横臂;
32.3、限位件;31、第一限位杆;32、第二限位杆;
33.4、推杆安装架;
34.5、推杆。
具体实施方式
35.为使本实用新型解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面结合附图并通过具体实施方式来进一步说明本实用新型的技术方案。
36.在本实用新型的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
37.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
38.在本实施例的描述中,术语“上”、“下”、“左”、“右”等方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化操作,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅仅用于在描述上加以区分,并没有特殊的含义。
39.本实施例提供了一种洗衣机箱体自动悬挂装置,用于悬挂位于流水线输送机构100上的洗衣机箱体200。如图1所示,该洗衣机箱体自动悬挂装置包括位置传感器1和悬挂机构2。其中,位置传感器1设置在流水线输送机构100的末端,以检测洗衣机箱体200是否到达预设位置。悬挂机构2设置在流水线输送机构100的上方并与位置传感器1通讯连接。悬挂机构2包括悬挂链21和挂具22,挂具22可移动地安装在悬挂链21上。悬挂机构2被配置为在洗衣机箱体200到达预设位置后,通过挂具22挂接洗衣机箱体200,并使挂具22沿悬挂链21移动以提升洗衣机箱体200。
40.按以上设置,当位置传感器1检测到洗衣机箱体200到达预设位置后,位置传感器1会将信号传送给悬挂机构2,进而通过运行悬挂链21使挂具22也移动到预设位置,并使挂具22挂接在洗衣机箱体200上;之后,通过继续运行悬挂链21,可使挂具22继续移动并将洗衣机箱体200升起,进而将洗衣机箱体200从流水线输送机构100上移走,最终实现洗衣机箱体200的自动悬挂。整体来看,通过该洗衣机箱体自动悬挂装置实现了自动化生产,工作过程无需人工参与,生产效率高,减少了安全隐患。同时,与使用上件机械手的设置相比,该洗衣机箱体自动悬挂装置的结构明显更为简单,成本更低,具有良好的经济性。
41.具体地,如图2所示,对于流水线输送机构100,其包括固定架101和输送带102。其中,输送带102安装在固定架101上,用于传送洗衣机箱体200。本实施例中,位置传感器1即安装在固定架101上,且位置传感器1位于输送带102的宽度方向的一侧。可选地,位置传感器1为光电感应器,其可实现非接触检测,且响应时间短,检测精度高。
42.对于悬挂链21,其包括水平段211和由水平段211的一端倾斜向上延伸形成的倾斜段212,且水平段211和倾斜段212的连接位置位于流水线输送机构100上的预设位置的正上方。按此,当挂具22由悬挂链21的水平段211到达水平段211和倾斜段212的连接位置后,挂
具22可与处于预设位置的洗衣机箱体200相挂接;之后,使挂具22沿倾斜段212运动,则可通过挂具22将洗衣机箱体200升高,进而将洗衣机箱体200从输送带102上移走,实现洗衣机箱体200的自动悬挂。
43.本实施例中,水平段211和倾斜段212之间的夹角α设置为145
°
,以和悬挂链21的运行速度和洗衣机箱体200的重量相匹配,并兼顾倾斜段212的长度,节约物料成本。在其它实施例中,根据实际需要,也可使夹角α大于145
°
且小于180
°
,只要能保证挂具22和洗衣机箱体200连接后可稳定地将洗衣机箱体200升起既可。
44.此外,需注意的是,悬挂链21的运行速度过快虽能满足生产要求,但是难以保证挂具22能够与洗衣机箱体200充分接触并升起洗衣机箱体200。基于此,经综合考虑后,悬挂链21的运行速度设为0.4m/s。
45.下面,结合图1
‑
图3,对挂具22的设置进行介绍。
46.如图1所示,考虑到流水线输送机构100上会持续传送多个洗衣机箱体200,故沿悬挂链21的长度方向,在悬挂链21上间隔安装有多个挂具22。按此,可以通过多个挂具22依次悬挂多个洗衣机箱体200,进一步提高生产效率。
47.以具体结构而言,如图3所示,挂具22包括竖杆221和挂钩222。其中,竖杆221的上端与悬挂链21连接,竖杆221的下端与挂钩222连接。当洗衣机箱体200到达预设位置后,如图2所示,挂钩222能够与开设在洗衣机箱体200侧面的箱体开口201相钩连,从而实现挂具22和洗衣机箱体200之间的连接。可以理解的是,在实际设计时,应使挂钩222朝向箱体开口201设置,以使挂钩222可以和箱体开口201相钩连。
48.进一步地,如图3所示,挂具22还包括u形架223,u形架223连接在竖杆221的下端且开口朝下。具体地,u形架223包括两个侧臂2231。如图1所示,当挂钩222和箱体开口201相钩连时,两个侧臂2231能够分别与位于箱体开口201两侧的洗衣机箱体200相抵接,从而可在悬挂洗衣机箱体200时有效避免洗衣机箱体200发生晃动,提高了整体结构的稳定性。
49.更具体地,u形架223还包括一个横臂2232,其用于连接两个侧臂2231,u形架223即通过此横臂2232与竖杆221的下端相连,挂钩222直接固定在该横臂2232上。
50.本实施例中,除位置传感器1和悬挂机构2外,还在洗衣机箱体自动悬挂装置中设置有限位件3和推杆5。
51.对于限位件3,其安装在固定架101上。当洗衣机箱体200到达预设位置后,限位件3能够与洗衣机箱体200抵接,以限制洗衣机箱体200沿输送带102继续移动,从而保证了洗衣机箱体200位置的准确性。
52.以具体结构而言,如图2所示,限位件3包括设置在输送带102上方的第一限位杆31。沿输送带102的传送方向,第一限位杆31位于洗衣机箱体200的下游,且第一限位杆31沿输送带102的宽度方向设置。按此,可使第一限位杆31与洗衣机箱体200的一面(记为第一面)抵接,从而将洗衣机箱体200限定在预设位置。
53.进一步地,限位件3还包括位于输送带102上方的第二限位杆32。第二限位杆32沿输送带102的长度方向设置,且第二限位杆32安装在第一限位杆31的轴向的第一侧以形成l形限位结构;推杆5设置在第一限位杆31轴向的第二侧。
54.当洗衣机箱体200到达预设位置后,通过推杆5能够推动洗衣机箱体200移动,使洗衣机箱体200与第二限位杆32抵接。由于洗衣机箱体200为长方体结构,所以此时通过上述l
形限位结构的限位作用能够进一步保证洗衣机箱体200位置的准确性。具体地,第二限位杆32与洗衣机箱体200的第二面抵接,第二面和第一面为相邻的两个面,箱体开口201即设置在第二面上。
55.本实施例中,第一限位杆31和第二限位杆32直接相连。限位件3还包括竖直设置的连接杆,第一限位杆31和第二限位杆32均通过连接杆与固定架101固定连接。具体地,连接杆通过螺钉固定在固定架101上。
56.可选地,推杆5为气动推杆,其反应迅速,成本较低。本实施例中,气动推杆的伸缩端还连接有一块平板,气动推杆通过该平板和洗衣机箱体200贴合接触,以更加稳定地推动洗衣机箱体200。进一步地,在洗衣机箱体自动悬挂装置中还设置有推杆安装架4,推杆5安装在推杆安装架4上。可以理解的是,推杆安装架4的高度应根据洗衣机箱体200的高度进行调节,以保证推杆5的正常使用。
57.本实施例中,推杆5也与光电感应器通讯连接,可在接收到洗衣机箱体200的位置信息后启动。此时,该洗衣机箱体自动悬挂装置的整体工作过程如下:当光电感应器感应到洗衣机箱体200到达预设位置后,推杆5启动并推动洗衣机箱体200,使洗衣机箱体200与限位件3充分抵接,保证洗衣机箱体200位置的准确性;之后,悬挂链21通过挂具22钩连洗衣机箱体200,进而使洗衣机箱体200升高并将洗衣机箱体200从流水线输送机构100上移走,最终实现洗衣机箱体200的自动悬挂。
58.综上,本实施例提供了一种洗衣机箱体自动悬挂装置,其能够实现洗衣机箱体200的自动悬挂,无需人力,生产效率高。以具体数据而言,若通过人力悬挂洗衣机箱体200,则该工位的生产节拍为12秒/台,而在使用上述洗衣机箱体自动悬挂装置后,该工位的生产节拍可变为10秒/台。
59.同时,从悬挂机构2、限位件3和推杆5的设置来看,与上件机械手相比,该洗衣机箱体自动悬挂装置的结构更为简单,成本更低,具有良好的经济性。
60.以上内容仅为本实用新型的较佳实施例,对于本领域的普通技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1