一种用于可回收垃圾的垃圾分类回收装置
1.本实用新型属于垃圾分类回收技术领域,尤其涉及一种用于可回收垃圾的垃圾分类回收装置。
背景技术:
2.近年来,垃圾分类得到了广泛关注。垃圾被人们称为放错位置的资源,最主要分为可回收和不可回收等几类,我国城市垃圾处理起步较晚,国外城市垃圾资源化已进入综合利用阶段,其资源化利用率已在60%以上,而我国尚不到5%,特别是对废金属、塑料、玻璃、废纸等可回收物的回收利用。同时,随着生活垃圾的产量越来越多,传统的垃圾分类回收呈现出越来越多的问题,如垃圾清运效率低下、清洁人员工作量增加和垃圾后续处理困难。基于这些问题,将物联网与垃圾分类回收利用相结合,提出智能垃圾分类回收装置,致力于实现垃圾分类回收的创新和应用。不仅有利于建设绿色可持续发展的环境,而且有利于带动其他产业的发展。
技术实现要素:
3.本实用新型要解决的技术问题是提供一种用于可回收垃圾的垃圾分类回收装置,以解决现有垃圾分类回收占用人力资源多的问题。
4.为解决上述问题,本实用新型的技术方案为:
5.本实用新型的一种用于可回收垃圾的垃圾分类回收装置,包括:用于输送可回收垃圾的输送平台、移动部和抓取部;
6.所述移动部设于外部平台上,输出端设有所述抓取部,用于带动所述抓取部在所述输送平台的上方移动;
7.其中,所述抓取部包括机械爪和视觉识别单元;所述机械爪包括若干固定杆、若干夹持杆和驱动组件;
8.各所述固定杆的第一端相连形成一连接端,且各所述固定杆位于同于平面,所述固定端的上表面与所述移动部的输出端相连;所述夹持杆分别转动连接于相对应所述固定杆的第二端,且转动方向朝向所述连接端;所述夹持件朝向所述输送平台的一端为第一端,若干所述夹持杆的第一端用于配合夹持可回收垃圾;所述驱动组件设于所述固定杆上,且输出端与所述夹持杆相连,用于带动所述夹持杆朝向所述连接端转动;
9.所述视觉识别单元设于所述连接端的下端面上,用于识别所述输送平台上的可回收垃圾。
10.本实用新型的用于可回收垃圾的垃圾分类回收装置,所述驱动组件包括气缸、铰链;所述气缸的活塞杆的输出端与所述铰链的第一端转动连接;所述铰链的第二端与所述夹持杆的第二端转动连接。
11.本实用新型的用于可回收垃圾的垃圾分类回收装置,所述气缸内还设有弹簧;所述弹簧设于所述气缸的活塞腔内,一端与所述活塞杆相连,另一端与所述活塞腔的腔体相
连,用于使所述活塞杆缩回。
12.本实用新型的用于可回收垃圾的垃圾分类回收装置,所述夹持杆的第一端上设有防滑垫。
13.本实用新型的用于可回收垃圾的垃圾分类回收装置,所述移动部包括x轴机构、y轴机构、z轴机构、第一连接件和第二连接件;
14.所述x轴机构的输出端上设有所述第一连接件,用于带动所述第一连接件在x轴方向上移动;所述y轴机构设于所述第一连接件上,且所述y轴机构的输出端上设有所述第二连接件,用于带动所述第二连接件在y轴方向上移动;所述z轴机构设于所述第二连接件上,且所述z轴机构的输出端连接有所述连接端,用于带动所述抓取部在z轴方向上移动。
15.本实用新型的用于可回收垃圾的垃圾分类回收装置,所述z轴机构包括齿条、z轴滑杆、齿轮、第一电机;
16.所述z轴滑杆上设有z轴滑道;
17.所述第二连接件的一端设置于所述y轴机构的输出端,另一端滑动连接于所述z轴滑道;
18.所述z轴滑杆上沿z轴方向设有齿条;
19.所述第一电机设于所述第二连接件上,输出端安装有所述齿轮,且所述齿轮与所述齿条啮合,用电带动所述齿条和所述z轴滑杆沿z轴方向移动。
20.本实用新型的用于可回收垃圾的垃圾分类回收装置,所述y轴机构包括y轴滑杆、第二电机、第一螺旋杆;
21.所述y轴滑杆上设有y轴滑道;
22.所述第二电机设于所述y轴滑杆上,输出端连接有所述第一螺旋杆,且所述第一螺旋杆的旋转轴平行于y轴方向;
23.所述第二连接件滑动连接于所述y轴滑道,并与所述第一螺旋杆螺纹传动连接;
24.所述y轴滑杆安装于所述第一连接件。
25.本实用新型的用于可回收垃圾的垃圾分类回收装置,所述x轴机构包括x轴滑杆、第三电机、第二螺旋杆;
26.所述x轴滑杆上设有x轴滑道;
27.所述第三电机设于所述x轴滑杆上,输出端连接有所述第二螺旋杆,且所述第二螺旋杆的旋转轴平行于x轴方向;
28.所述第一连接件滑动连接于所述x轴滑道,并与所述第二螺旋杆螺纹传动连接。
29.本实用新型的用于可回收垃圾的垃圾分类回收装置,还包括若干支架,所述支架的第一端分别与所述x轴机构相连,第二端安装于外部平台上。
30.本实用新型由于采用以上技术方案,使其与现有技术相比具有以下的优点和积极效果:
31.本实用新型一实施例通过设置输送平台对可回收垃圾进行输送,并在输送平台设置移动部,移动部带动抓取部在可回收垃圾的输送路径上方移动。抓取部具体包括机械爪和视觉识别单元,机械爪由若干固定杆、夹持杆和驱动组件组成。在分类回收时,由视觉识别单元对可回收垃圾分析垃圾类别,并通过驱动组件驱动对应的夹持杆对可回收垃圾进行夹取,效率高,节省人力,解决了现有垃圾分类回收占用人力资源多的问题。
附图说明
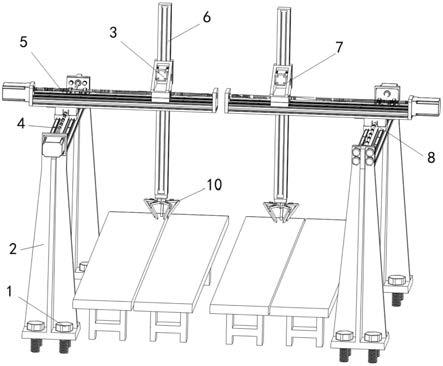
32.图1为本实用新型的用于可回收垃圾的垃圾分类回收装置的示意图;
33.图2为本实用新型的用于可回收垃圾的垃圾分类回收装置的x轴机构的示意图;
34.图3为本实用新型的用于可回收垃圾的垃圾分类回收装置的第二连接件的示意图;
35.图4为本实用新型的用于可回收垃圾的垃圾分类回收装置的第一连接件的示意图;
36.图5为本实用新型的用于可回收垃圾的垃圾分类回收装置的机械爪的示意图;
37.图6为本实用新型的用于可回收垃圾的垃圾分类回收装置的侧视图;
38.图7为本实用新型的用于可回收垃圾的垃圾分类回收装置的机械爪的另一示意图;
39.图8为本实用新型的用于可回收垃圾的垃圾分类回收装置的机械爪的另一示意图。
40.附图标记说明:1:螺栓;2:支架;3:第一电机;4:x轴机构;5:y轴机构;6:z轴机构;7:第一连接件;8:第二连接件;9:输送平台;10:机械爪;401:轴承;402:凸形滑道;403:第一螺旋杆;404:螺钉;405:第二电机;601:齿条;602:凹形滑道;701:凹槽滑块;801:凸槽滑块;802:螺旋槽;803:支撑座;1001:气缸;1002:视觉识别单元;1003:防滑垫。
具体实施方式
41.以下结合附图和具体实施例对本实用新型提出的一种用于可回收垃圾的垃圾分类回收装置作进一步详细说明。根据下面说明和权利要求书,本实用新型的优点和特征将更清楚。
42.参看图1至图8,在一个实施例中,一种用于可回收垃圾的垃圾分类回收装置,包括:用于输送可回收垃圾的输送平台9、移动部和抓取部。移动部设于外部平台上,输出端设有抓取部,用于带动抓取部在输送平台9的上方移动。
43.其中,抓取部包括机械爪10和视觉识别单元1002。机械爪10包括若干固定杆、若干夹持杆和驱动组件。各固定杆的第一端相连形成一连接端,且各固定杆位于同于平面,固定端的上表面与移动部的输出端相连。夹持杆分别转动连接于相对应固定杆的第二端,且转动方向朝向连接端。夹持件朝向输送平台9的一端为第一端,若干夹持杆的第一端用于配合夹持可回收垃圾。驱动组件设于固定杆上,且输出端与夹持杆相连,用于带动夹持杆朝向连接端转动。
44.视觉识别单元1002则设于连接端的下端面上,用于识别输送平台9上的可回收垃圾,其中,可回收垃圾包括废金属、塑料、玻璃、废纸等。
45.本实施例通过设置输送平台9对可回收垃圾进行输送,并在输送平台9设置移动部,移动部带动抓取部在可回收垃圾的输送路径上方移动。抓取部具体包括机械爪10和视觉识别单元1002,机械爪10由若干固定杆、夹持杆和驱动组件组成。在分类回收时,由视觉识别单元1002对可回收垃圾分析垃圾类别,并通过驱动组件驱动对应的夹持杆对可回收垃圾进行夹取,效率高,节省人力,解决了现有垃圾分类回收占用人力资源多的问题。
46.下面对本实施例的用于可回收垃圾的垃圾分类回收装置的具体结构进行进一步
说明:
47.参看图5,在本实施例中,固定杆、夹持杆和驱动组件的数量可以为五个,从而形成一个五爪的机械爪10,以保证对可回收垃圾的稳定抓取。
48.参看图8,驱动组件具体可包括气缸1001、铰链。气缸1001的活塞杆的输出端与铰链的第一端转动连接。铰链的第二端与夹持杆的第二端转动连接。
49.进一步地,气缸1001内还设有弹簧。弹簧设于气缸1001的活塞腔内,一端与活塞杆相连,另一端与活塞腔腔体朝向活塞杆出口的位置相连,为压缩状态,用于使在气缸1001内气体不输出时,弹性力作用在活塞杆上,活塞杆缩回气缸1001内,从而使得夹持杆朝向远离连接端的方向转动。
50.进一步地,夹持杆的第一端上设有防滑垫1003,从而避免夹持的可回收垃圾滑落。
51.参看图1至图5,在本实施例中,移动部具体可包括x轴机构4、y轴机构5、z轴机构6、第一连接件7和第二连接件8。
52.x轴机构4的输出端上设有第一连接件7,用于带动第一连接件7在x轴方向上移动。y轴机构5设于第一连接件7上,且y轴机构5的输出端上设有第二连接件8,用于带动第二连接件8在y轴方向上移动。z轴机构6设于第二连接件8上,且z轴机构6的输出端连接有连接端,用于带动抓取部在z轴方向上移动。从而实现抓取部在x轴方向、y轴方向和z轴方向上的移动。
53.其中,z轴机构6包括齿条601、z轴滑杆、齿轮、第一电机3。z轴滑杆上设有z轴滑道。第二连接件8的一端设置于y轴机构5的输出端,另一端滑动连接于z轴滑道。z轴滑杆上沿z轴方向设有齿条601。第一电机3设于第二连接件8上,输出端安装有齿轮,且齿轮与齿条601啮合,用电带动齿条601和z轴滑杆沿z轴方向移动。其中,z轴滑道为凹形滑道602,第二连接件8的另一端设有相对应的凹槽滑块701。
54.y轴机构5包括y轴滑杆、第二电机405、第一螺旋杆403。y轴滑杆上设有y轴滑道。第二电机405设于y轴滑杆上,输出端连接有第一螺旋杆403,且第一螺旋杆403的旋转轴平行于y轴方向。第二连接件8滑动连接于y轴滑道,并与第一螺旋杆403螺纹传动连接。y轴滑杆安装于第一连接件7。
55.x轴机构4包括x轴滑杆、第三电机、第二螺旋杆。x轴滑杆上设有x轴滑道。第三电机设于x轴滑杆上,输出端连接有第二螺旋杆,且第二螺旋杆的旋转轴平行于x轴方向。第一连接件7滑动连接于x轴滑道,并与第二螺旋杆螺纹传动连接。
56.其中,x轴滑道和y轴滑道包括两种形式,分别为凹形滑道602和凸形滑道402,凸形滑道402通过螺钉404与所述x轴滑杆和y轴滑杆相连。
57.第一连接件7包括凸槽滑块801、螺旋槽802、支撑座803。凸槽滑块801滑动连接于凸形滑道402内;螺旋槽802设于凸槽滑块801上,并与第二螺旋杆螺纹连接;支撑座803则设于螺旋槽802上,用于与y轴滑杆相连接。
58.进一步地,第一螺旋杆403和第二螺旋杆分别通过轴承401安装在y轴滑杆和x轴滑杆上。
59.在本实施例中,垃圾分类回收装置还可包括若干支架2,支架2的第一端分别与x轴机构4相连,第二端安装于外部平台上。具体可为两个,分别安装在x轴滑杆的两端,第二端则可通过螺栓1固定在外部平台上。
60.上面结合附图对本实用新型的实施方式作了详细说明,但是本实用新型并不限于上述实施方式。即使对本实用新型作出各种变化,倘若这些变化属于本实用新型权利要求及其等同技术的范围之内,则仍落入在本实用新型的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1