一种手套装盒机构的制作方法
1.本实用新型涉及的是一种手套装盒机构。
背景技术:
2.一次性橡胶手套采用盒装出售,将若干只一次性橡胶手套经过充分挤压后装入盒体内,橡胶手套需要缩小2
‑
3倍才能装入规定的盒体内,比如常规堆叠高度为130mm,需挤压至55
‑
65mm,现有的装盒机不能实现这么大的压缩比例,因而无法实现自动装盒,只能采用人工装盒,但是人工装盒存在效率低、成本高的问题。
技术实现要素:
3.鉴于背景技术中存在的技术问题,本实用新型所解决的技术问题旨在提供一种手套装盒机构,解决一次性橡胶手套装盒的问题。
4.为解决上述技术问题,本实用新型采用如下的技术方案:该种手套装盒机构,其特征在于包括
5.送料部件,其包括有输送带,所述输送带上设有若干个物料腔,所述输送带的输出工位设有上下升降的压板;
6.送盒部件,其包括有传动带,所述传动带具有进料工位,所述进料工位的一侧与输送带的输出工位对应设置,所述进料工位的另一侧设有出夹工位;
7.及装盒部件,其包括有
8.导料盒,其设置在进料工位和输出工位之间,所述导料盒具有横向贯通的导料通道,所述导料通道具有进料口和出料口,且导料通道从进料口至出料口逐步缩小,
9.和横向移动的取料夹,其在出夹工位和输出工位之间横向移动,且横穿进料工位和导料通道。
10.物料置于物料腔内,由输送带将其送至输出工位,在输出工位压板下移将物料压实,所述取料夹伸出,穿过进料工位的盒体以及导料通道将输出工位的物料夹持,而后压板上移,取料夹回缩,压实后的物料进入导料通道,随着物料移动,导料盒对物料进行逐步挤压,这样既不会造成物料堵塞,又能使物料在移动过程中充分压缩,最终使物料的体积略小于盒体内腔,继而物料顺利进入进料工位的盒体内,而后取料夹松开,物料置于盒体内,取料夹则回缩至出夹工位,完成装盒后,盒体由传动带送至下道工序,取料夹则进行下一次的取料作业。
11.作为优选,所述输送带的输出工位的后方设有压实工位,所述压实工位设有上下升降的第二压板。物料在压实工位进行初步压实,进入输出工位进行二次压实,这样反复压实更利于压缩物料,为后续的装盒做初步准备。
12.作为优选,所述取料夹安装在滑座上,所述滑座滑动设置在直线导轨上,所述直线导轨横向安装在机架的横梁上,所述取料夹还与驱动其横向移动的动力件连接。
13.作为优选,所述取料夹包括有
14.夹座;
15.机械爪,其摆动安装在夹座上,且所述机械爪与驱动其上下摆动的驱动件连接,
16.及下夹板,其安装在夹座上,其与机械爪夹持配合。
17.所述驱动件驱动机械爪上下摆动,即机械爪相对下夹板打开、闭拢,机械抓向上摆动时取料夹张开,机械爪向下摆动则取料夹闭合夹持物料。
18.作为优选,所述机械爪上设有转轴,所述转轴转动安装在夹座上,所述机械爪的下端与驱动件铰接。
19.作为优选,所述压板倾斜设置,且所述压板朝导料盒方向向下倾斜。压板不仅将物料向下压实,而且起到了导入作用,使输出工位的输出口与导料通道更好衔接,物料在输出时体积更小,这样为物料进入导料通道做好准备。
20.作为优选,所述压板上开设有供机械爪插入的缺口。缺口的设置可使取料夹的机械爪高于压板,并从压板上方进入夹取物料,这样可以将物料全部夹持。
21.作为优选,所述输送带上设有底板、前挡板及后挡板,所述底板、前档板和后挡板围成物料腔,所述底板上设有供下夹板插入的插槽,所述插槽横向设置。所述下夹板插入插槽内,这样就不会与底板上的物料发生碰撞或有摩擦,与机械爪配合可以将全部物料夹持。
附图说明
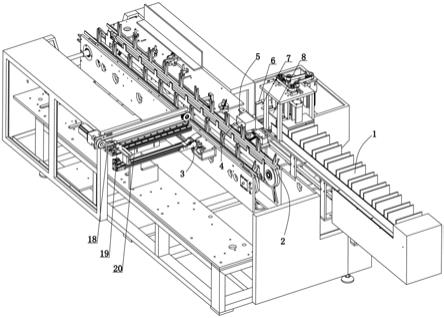
22.图1为本实用新型的结构示意图1。
23.图2为本实用新型的结构示意图2。
24.图3为本实用新型的俯视图。
25.图4为本实用新型取料夹的示意图。
具体实施方式
26.下面结合附图描述本实用新型的实施方式及实施例的有关细节及工作原理。该种手套装盒机构,包括送料部件、送盒部件及装盒部件;所述送料部件包括有输送带,所述输送带上设有若干个物料腔1,所述输送带的输出工位9设有上下升降的压板6,所述压板将输送带上输出工位的物料向下压实,为后续的挤压、装盒作业做初步准备;所述送盒部件包括有传动带2,所述传动带具有进料工位10,盒体由传动带进行输送,为给盒体定位,防止其在传动带上跑动,可以在传动带上设有挡块17,盒体置于两挡块之间,所述进料工位10的一侧与输送带的输出工位9对应设置,所述进料工位的另一侧设有出夹工位11,即进料工位设置在出夹工位和输出工位之间,三者左右对应设置;所述装盒部件包括有导料盒5和横向移动的取料夹3,所述导料盒设置在进料工位10和输出工位9之间,所述导料盒具有横向贯通的导料通道4,所述导料通道具有进料口和出料口,且导料通道从进料口至出料口逐步缩小,物料从进料口进入,向出料口移动时被逐步挤压,所述出料口应当不大于盒体开口,而且出料口略小于盒体开口为佳,这样出来的物料体积略小于盒体内腔,在进入盒体内时减少与盒体内壁的摩擦,更利于物料进入盒体内;所述取料夹3在出夹工位11和输出工位9之间横向移动,且横穿进料工位10和导料通道4。物料置于物料腔1内,由输送带将其送至输出工位9,输出工位的压板6下移将物料压实,降低物料堆叠的高度,为装盒作业做初步准备;所述取料夹3向输出工位方向横向移动,依次穿过进料工位10的盒体、导料通道4,取料夹张开将
输出工位9压实的物料夹持,而后压板6上移,取料夹3回缩,压实后的物料进入导料通道4,导料通道逐步缩小,随着物料移动,导料盒5对物料进行逐步挤压,使物料逐步缩小,因导料通道逐步缩小,因而物料不会在导料通道内卡住,也不会造成堵塞,而且导料通道能使物料在移动过程中充分压缩,最终使得物料的体积略小于盒体内腔,物料顺利进入进料工位10的盒体内,若物料的体积大于盒体内腔,物料则不能进入盒体,强硬塞入可能会致使盒体入口破损,若物料的体积与盒体内腔一致,物料与盒体内腔则会有摩擦,相对来说物料的体积略小于盒体内腔则能更顺利进入盒体内。所述物料完全进入盒体内,取料夹3张开,松开物料,物料置于盒体内,取料夹则回缩至出夹工位11,完成装盒后,盒体由传动带2送至下道工序,取料夹则进行下一次的取料作业。
27.所述压板6的升降及驱动取料夹3横向移动的动力件均可以气缸或丝杠机构等。见附图,本实施例中,所述压板的升降采用丝杠机构,即电机驱动螺杆转动,螺母带着压板在螺杆上上下移动;所述取料夹3安装在滑座19上,所述滑座滑动设置在直线导轨20上,所述直线导轨横向安装在机架的横梁上,所述取料夹3还与驱动其横向移动的动力件连接,所述动力件包括有传动带18、传动轮及电机,传动带设置在传动轮上,所述取料件3与传动带18连接,所述电机驱动传动轮转动,传动带跑动带动取料件沿直线导轨20横向移动。
28.所述输送带的输出工位10的后方设有压实工位,所述压实工位设有上下升降的第二压板8。物料在压实工位进行初步压实,进入输出工位进行二次压实,这样反复压实更利于压缩物料,为后续的装盒做初步准备,当然为了进一步压缩物料,所述压实工位可以设置多个,见附图,本实施例中设置了两个压实工位,即物料经过两次初步压实后再进入输出工位进行二次压实,每次压实都使物料的体积被进一步缩小。并且为了使输出工位9的物料顺利进入导料通道4,所述压板6倾斜设置,且所述压板朝导料盒方向向下倾斜,使输出工位的输出口与导料通道的加料口4更好衔接,物料在输出时体积更小,这样为物料进入导料通道4做好准备,因此,输出工位的压板6不仅将物料向下压实,而且起到了导入作用。
29.所述取料夹3可以采用常规的自动开合的机械夹,见附图4,本实施例中,所述取料夹包括有夹座23、机械爪21及下夹板25,所述机械爪摆动安装在夹座上,且所述机械爪与驱动其上下摆动的驱动件24连接,所述驱动件可以采用气缸,所述机械爪上设有转轴22,所述转轴转动安装在夹座23上,所述机械爪的下端与气缸的输出端铰接;所述下夹板25安装在夹座上,其与机械爪21夹持配合。所述气缸伸出驱动机械爪向上摆动,取料夹打开,所述气缸回缩则带动机械爪向下摆动,取料夹闭合夹持物料;所述机械爪的内壁为圆弧形,这样机械爪21与下夹板25夹持时形成更大的空间,足够容纳物料,机械爪与下夹板夹持时就不会将物料往外挤出,因而夹持更为牢固。
30.所述输送带上物料腔1的形成可以采用隔板,即在输送带上安装隔板,两隔板即可形成物料腔。见附图,本实施例中,所述输送带上设有底板13、前挡板12及后挡板15,所述底板、前档板和后挡板围成物料腔1,为了节省空间及降低成本,前、后挡板可以合并使用,挡板既可以作为前一物料腔的后挡板,也可以作为后一物料腔的前档板,本实施例采用独立的前档板12和后挡板15,所述底板13上设有供下夹板25插入的插槽14,所述插槽横向设置;所述压板6上开设有供机械爪插入的缺口7,在取料时,所述下夹板25插入插槽14内,这样就不会与底板上的物料发生碰撞或有摩擦,而缺口7的设置可使张开的取料夹的机械爪21高于压板,并从压板上方进入,并与下夹板配合将全部物料夹持。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1