一种人工智能设备测试平台的制作方法
1.本技术涉及人工智能的领域,尤其是涉及一种人工智能设备测试平台。
背景技术:
2.人工智能是计算机科学的一个分支,它企图了解智能的实质,并生产出一种新的能以人类智能相似的方式做出反应的智能机器,该领域的研究包括机器人、语言识别、图像识别、自然语言处理和专家系统等;人工智能从诞生以来,理论和技术日益成熟,应用领域也不断扩大,可以设想,未来人工智能带来的科技产品,将会是人类智慧的“容器”;人工智能可以对人的意识、思维的信息过程的模拟。
3.人工智能在出厂时多需要对其进行检测,通过串行接口导入数据等,使其进行一定程度的运作,当运作没有偏差时,即设备完好,可以进行出厂包装,但现有的人工智能检测大多为抽样检测,导致所有装置中存在遗漏的情况,导致用户体验的下降。
4.针对上述中的相关技术,发明人认为存在有抽样检测存在遗漏的缺陷。
技术实现要素:
5.为了解决上述提出的问题,本技术提供一种人工智能设备测试平台。
6.本技术提供的一种人工智能设备测试平台采用如下的技术方案:
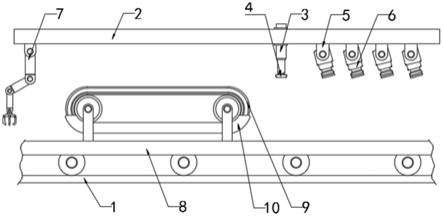
7.一种人工智能设备测试平台,包括传送带,所述传送带的上方设置有支架,所述支架上沿传送带运行方向依次设置有机械臂、串行接口和ccd相机系统,所述机械臂和串行接口之间设置有同步带,且同步带上均匀分布有用于人工智能充电的插接头,并且同步带的转速和传送带相同。
8.通过采用上述技术方案,机械臂用于对设备进行抓取和放置,串行接口用于对设备进行数据传输,ccd相机系统用于对设备进行监测,插接头用于对设备进行充电。
9.优选的,所述串行接口的上方设置有电动伸缩杆,且电动伸缩杆和支架之间固定连接,并且电动伸缩杆的输出端和串行接口之间固定连接。
10.通过采用上述技术方案,电动伸缩杆传动串行接口上下运动,使其和设备之间进行数据传递。
11.优选的,所述ccd相机系统设置有多个,且多个ccd相机系统的上方均转动连接有转动轴,并且转动轴和支架之间转动连接。
12.通过采用上述技术方案,ccd相机系统通过转动轴改变对应位置,从而适应不同的观察需求。
13.优选的,所述传送带的两侧设置有架台,且两个架台中的一个和同步带之间通过支撑杆固定连接,所述同步带的内侧固定连接有固定块,且固定块的内侧滑动连接有滑竿,并且滑竿的顶端和插接头之间固定连接,所述滑竿外壁上环形阵列限位块,所述固定块的内壁上环形阵列开设滑槽,且滑槽和限位块之间滑嵌配合。
14.通过采用上述技术方案,滑竿在固定块的内部进行滑动,改变插接头的位置,滑竿
的径向通过限位块和滑槽之间的配合限位,保证插接头和设备之间插接位置恒定。
15.优选的,所述滑竿上套设有挤压弹簧,且滑竿通过挤压弹簧和固定块之间弹性连接,所述滑竿远离插接头的一端内部滑嵌有滚珠,所述架台上焊接有限位板,且限位板的顶端向远离插接头的一侧倾斜设置,限位板的底端呈竖直设置。
16.通过采用上述技术方案,滚珠和限位板之间接触,减小和限位板之间的摩擦力,通过限位板的形状设置,保证滑竿在位于同步带上方时不动作,位于下方时突出同步带设置。
17.综上所述,本技术包括以下至少一种有益技术效果:
18.1.通过设置传送带和支架,在支架上设置用于摆放的机械臂,用于充电的插接头,用于传输数据的串行接口,以及用于对预设动作进行监测的ccd相机系统,通过其相互之间的配合,实现对于人工智能的便捷检测,保证出厂的质量;
19.2.通过在传送带一侧设置与其同速运转的同步带,通过限位板对于滑竿的推挤,实现对于滑竿一端插接头位置的改变,从而使得插接头插接至人工智能的充电口上,实现充电操作,在滑竿失去限位板的限制后,在挤压弹簧作用下,插接头从充电口中拔出。
附图说明
20.图1是申请实施例的正视结构示意图。
21.图2是申请实施例的侧视结构示意图。
22.图3是申请实施例的滑动杆结构示意图。
23.附图标记说明:1、传送带;2、支架;3、电动伸缩杆;4、串行接口;5、转动轴;6、ccd相机系统;7、机械臂;8、架台;9、同步带;10、限位板;11、滑竿;12、固定块;1201、滑槽;13、插接头;14、挤压弹簧;15、滚珠;16、限位块。
具体实施方式
24.以下结合附图1
‑
3对本技术作进一步详细说明。
25.本技术实施例公开一种人工智能设备测试平台。参照图1,一种人工智能设备测试平台,包括传送带1,传送带1为间歇式运作,保证串行接口4等机构的数据传输稳定,传送带1的上方设置有支架2,支架2上沿传送带1运行方向依次设置有机械臂7、机械臂7间隔的对设备进行放置,且设备的方向位置均固定,设备相互之间的距离固定,串行接口4和ccd相机系统6,串行接口4的上方设置有电动伸缩杆3,电动伸缩杆3垂直于支架2设置,且电动伸缩杆3和支架2之间固定连接,并且电动伸缩杆3的输出端和串行接口4之间固定连接,串行接口4和外部数据库之间通讯连接,ccd相机系统6设置有多个,且多个ccd相机系统6的上方均转动连接有转动轴5,并且转动轴5和支架2之间转动连接,转动轴5提供ccd相机系统6在支架2上360
°
转动的同时,具有沿转轴180
°
的转动范围。
26.参照图2和图3,机械臂7和串行接口4之间设置有同步带9,同步带9的内部呈中空结构,用于对固定块12的放置,且同步带9上均匀分布有用于人工智能充电的插接头13,并且同步带9的转速和传送带1相同,保证在同步带9和传送带1转动过程中,插接头13和设备之间的对接稳定,避免相互之间断开,传送带1的两侧设置有架台8,且两个架台8中的一个和同步带9之间通过支撑杆固定连接,支撑杆和同步带9内侧的两个传动辊之间转动连接,对传动辊的位置进行固定,从而对同步带9相对架台8位置进行固定,同步带9的内侧固定连
接有固定块12,且固定块12的内侧滑动连接有滑竿11,并且滑竿11的顶端和插接头13之间固定连接,滑竿11外壁上环形阵列限位块16,固定块12的内壁上环形阵列开设滑槽1201,且滑槽1201和限位块16之间滑嵌配合,通过滑槽1201和限位块16之间的相互滑动连接,保证滑竿11的径向位置不会发生变化,保证插接位置的稳定,滑竿11上套设有挤压弹簧14,且滑竿11通过挤压弹簧14和固定块12之间弹性连接,滑竿11远离插接头13的一端内部滑嵌有滚珠15,滚珠15相对于滑竿11转动,架台8上焊接有限位板10,且限位板10的顶端向远离插接头13的一侧倾斜设置,限位板10的底端呈竖直设置,限位板10截面呈张角为钝角的v形结构,限位板10对滑竿11推动的距离,和插接头13所能插接的距离相同,保证插接的稳定。
27.本技术实施例一种人工智能设备测试平台的实施原理为:通过机械臂7将外部待检测的智能设备输送至传送带1上,通过传送带1的匀速转动,对智能设备的位置进行传送,启动同步带9的传动机构运转,同步带9进而配合传送带1进行转动,同步带9转动时对其上的滑竿11进行传动,当滑竿11一端的滚珠15和限位板10之间接触时,沿限位板10表面进行运动,从而推动滑竿11向人工智能设备运动,最终实现将插接头13插接至人工智能设备的充电口中,由于同步带9的水平段具有一定长度,从而插接头13可以对其进行一定时间的充电操作,完成充电操作后,失去限位板10限制后,在挤压弹簧14作用下,滑竿11复位,从而将插接头13从人工智能设备上拔出,人工智能设备在运行至串行接口4的下方时,电动伸缩杆3伸长,串行接口4进而对人工智能设备进行数据传输,使其可以进行动作,人工智能在继续向后方传动时,对下载的数据进行处理分析后进行动作,此时的ccd相机系统6对人工智能的状态进行捕捉,并将拍摄的照片和预设照片之间对比,在动作和预设动作不同时,进行报警并标记,将残次品剔除。
28.需要说明的是,在本文中,诸如术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
29.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1