一种臂架后移式浮式起重船的制作方法
1.本实用新型涉及领域,特别涉及一种臂架后移式浮式起重船。
背景技术:
2.目前,公布号为cn112125177a的中国发明专利申请,公布了一种起重船,包括船体和吊机,设置在所述船体的一端;若干辅助船体,设置在装有所述吊机的船体一端;两个辅助船体,设置在装有所述吊机的船体一端;两个所述辅助船体对称分布在所述船体的中心线两侧,两个所述辅助船体之间适于放置沉桩定位架。
3.在海洋施工作业工程中,经常需要采用浮式起重船进行起吊施工作业,常规的起重船的起重机臂是竖直安装于船体上,在船体航行的过程中,由于起吊臂迎风面较大,风阻较大,不利于船体航行的稳定。
技术实现要素:
4.本实用新型的目的是提供一种臂架后移式浮式起重船,其优点是吊臂基座能够后移至船尾,以便起吊臂能够平放下来,从而较好的减少了起吊臂的迎风面,便于船体稳定的航行。
5.本实用新型的上述技术目的是通过以下技术方案得以实现的:一种臂架后移式浮式起重船,包括船体、设置在船体上的甲板平台和牵引架,所述牵引架固定设置在船尾;
6.所述甲板平台上沿其长度方向滑移配合有吊臂基座,所述吊臂基座上转动连接有起吊臂;
7.所述甲板平台上设有引导吊臂基座滑移的引导组件、牵引吊臂基座滑移的牵引组件和用于限定吊臂基座位置的定位组件;
8.所述引导组件包括沿甲板平台长度方向设置的固定导轨和沿竖直方向滑移设置的升降导轨,所述吊臂基座底部转动连接有与固定导轨和升降导轨配合的行走轮,所述吊臂基座底部设置有支撑块,所述支撑块的底面低于行走轮的最低点。
9.通过上述技术方案,甲板平台用于放置牵引架、吊臂基座、引导组件、牵引组件和定位组件等;牵引架用于牵引起吊臂在吊臂基座上转动,起吊臂用于起吊物品;引导组件用于引导吊臂基座的滑移,升降导轨和固定导轨可以组合在一起,行走轮用于与固定导轨和升降导轨配合,更加便于吊臂基座沿甲板平台的长度方向滑移;支撑块用于在升降导轨向下滑移后支撑吊臂基座,支撑块与甲板平台的接触使得吊臂基座能够放置的更加稳定;牵引组件用于吊臂基座沿甲板平台的长度方向滑移,以便吊臂基座能够稳定的滑移到船头或者船尾处;牵引组件将吊臂基座牵引到船尾后,起吊臂可以转动至水平状态,即可将起吊臂水平放置到甲板上方,进而较好的减少了迎风面,便于船体稳定的航行。
10.本实用新型进一步设置为:所述甲板平台下方固定有升降千斤顶,所述升降千斤顶的活塞杆与升降导轨连接;
11.所述升降导轨的两端均开设有滑移槽,所述固定导轨和甲板平台上均设有与滑移
槽滑移配合的引导块。
12.通过上述技术方案,升降千斤顶用于推动升降导轨沿竖直方向滑移,滑移槽和引导块的滑移配合用于引导升降导轨稳定的沿竖直方向滑移,以便升降导轨更加准确的与固定导轨对接,从而吊臂基座移动时更加平稳。
13.本实用新型进一步设置为:所述固定导轨远离活动导轨的一端设有与甲板平台固定连接的船尾限位板,所述活动导轨远离固定导轨的一端设有与甲板平台固定连接的船头限位板。
14.通过上述技术方案,船尾限位板和船头限位板分别用于限制吊臂基座在船头和船尾。
15.本实用新型进一步设置为:所述定位组件包括设置在吊臂基座上的定位板和设置在甲板上的限定板,所述限定板在靠近升降导轨的一侧;
16.所述定位板上开设有多个定位孔,所述限定板上开设有多个限位孔,多个所述限位孔中均插设有限位插销;所述定位孔到支撑块底部的距离等于限位孔到甲板平台的距离。
17.通过上述技术方案,将限位插销同时贯穿限位孔和定位孔,可以将限定板和定位板相对固定在一起,从而将吊臂基座与甲板平台相对固定在一起,使得吊臂基座能够更加稳定的进行起吊作业。
18.本实用新型进一步设置为:所述定位组件包括与甲板平台转动连接的锁定板、锁定卡齿和定位卡齿,所述锁定卡齿设置在锁定板朝向吊臂基座的一侧,所述定位卡齿设置在吊臂基座朝向锁定板的一侧;
19.所述锁定卡齿和定位卡齿均沿甲板平台的长度方向均匀设有多个,多个所述锁定卡齿和定位卡齿相互咬合设置。
20.通过上述技术方案,锁定板用于设置多个锁定卡齿,多个锁定卡齿和定位卡齿相互咬合,使得吊臂基座能够稳定的与甲板相互固定连接;锁定板与甲板转动连接,使得可以方便的带动锁定卡齿与定位卡齿咬合,或者使锁定卡齿与定位卡齿分离开来。
21.本实用新型进一步设置为:所述锁定卡齿远离锁定板的一侧设有倾斜设置的导向面。
22.通过上述技术方案,导向面用于引导锁定卡齿插设到定位卡齿之间的间隙中,从而更加便于锁定卡齿与定位卡齿的相互咬合。
23.本实用新型进一步设置为:所述锁定板和甲板平台之间设置有驱动千斤顶,所述驱动千斤顶的活塞杆和缸体部分分别与甲板平台和锁定板转动连接。
24.通过上述技术方案,驱动千斤顶用于推动锁定板朝向靠近吊臂基座的方向转动,而且驱动千斤顶具有较好的自锁性能,使得锁定卡齿和定位卡齿能够咬合的更加稳定。
25.本实用新型进一步设置为:所述牵引组件包括设置在船尾的尾部卷扬机和设置在船头的头部卷扬机,所述尾部卷扬机和头部卷扬机上的钢缆均与吊臂基座连接。
26.通过上述技术方案,头部卷扬机用于将吊臂基座朝向船头牵引,尾部卷扬机用于将吊臂基座朝向船尾牵引;在吊臂基座需要移动到船尾时,尾部卷扬机工作将吊臂基座朝向船尾牵引过去,同时头部卷扬机起到刹车制动的作用,避免由于船体晃动使得吊臂基座过快撞向船尾的情况;从而使得吊臂基座能够更加稳定的移向船头或者船尾。
27.综上所述,本实用新型具有以下有益效果:
28.1.吊臂基座可以沿固定导轨和升降导轨滑移至船尾,从而可以方便起吊臂在不使用时放平到甲板平台上,较好的减少了吊臂的迎风面,以便船体的航行;
29.2.锁定板朝向吊臂基座的方向转动,可以方便的将锁定板上的锁定卡齿插设进定位卡齿的间隙中,以便将吊臂基座牢固的锁定在甲板平台上,以便在起吊物品时更加稳定。
附图说明
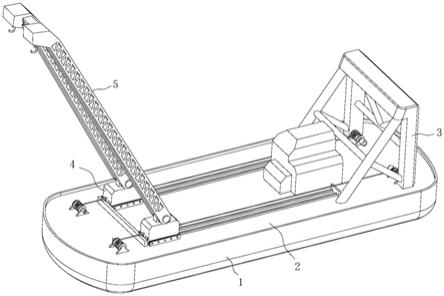
30.图1是实施例1的整体的结构示意图;
31.图2是实施例1的牵引组件和定位组件的结构示意图;
32.图3是实施例1的引导组件的结构示意图;
33.图4是实施例1的支撑块和行走轮位置关系的结构示意图;
34.图5是实施例1的升降千斤顶与升降导轨分解状态的结构示意图;
35.图6是实施例2的定位组件的结构示意图。
36.附图标记:1、船体;2、甲板平台;3、牵引架;4、吊臂基座;5、起吊臂;6、引导组件;7、牵引组件;8、定位组件;9、固定导轨;10、升降导轨;11、行走轮;12、支撑块;13、升降千斤顶;14、滑移槽;15、引导块;16、船尾限位板;17、船头限位板;18、定位板;19、限定板;20、定位孔;21、限位孔;22、限位插销;23、锁定板;24、锁定卡齿;25、定位卡齿;26、导向面;27、驱动千斤顶;28、尾部卷扬机;29、头部卷扬机。
具体实施方式
37.以下结合附图对本实用新型作进一步详细说明。
38.实施例1:
39.参考图1,一种臂架后移式浮式起重船,包括船体1、固定设置在船体1上的甲板平台2和固定设置在甲板平台2上的牵引架3,牵引架3采用螺栓固定连接在船尾;甲板平台2上滑移配合有吊臂基座4,吊臂基座4沿甲板平台2的长度方向滑移设置,吊臂基座4沿甲板平台2的宽度方向设置与两个,两个吊臂基座4上均转动连接有起吊臂5。
40.参考图2和图3,甲板平台2上设置有引导组件6、牵引组件7和定位组件8;引导组件6用于引导吊臂基座4的滑移,使吊臂基座4滑移的更加稳定;牵引组件7用于牵引吊臂基座4滑移,定位组件8用于将吊臂基座4在甲板上。
41.参考图2,牵引组件7包括尾部卷扬机28和头部卷扬机29,尾部卷扬机28设置在船尾,头部卷扬机29设置在船头,尾部卷扬机28和头部卷扬机29上的钢缆均与吊臂基座4连接;头部卷扬机29工作可以将吊臂基座4朝向船头的方向牵引,同时尾部卷扬机28可以做为刹车制动器进行牵制,避免吊臂基座4滑移过快,或者船体1晃动到时吊臂基座4受到影响过快的朝向船头滑去;当吊臂基座4需要移动至船尾时,尾部卷扬机28工作,同时头部卷扬机29做为刹车制动器进行牵制。
42.参考图3和图4,引导组件6包括固定导轨9和升降导轨10,固定导轨9和升降导轨10的横截面相同,升降导轨10可以和固定导轨9可以对接成一根导轨;吊臂基座4底部转动连接有行走轮11,行走轮11与固定导轨9和升降导轨10配合设置;吊臂基座4底部焊接有支撑块12,支撑块12的底面低于行走轮11的最低点。甲板平台2靠近船尾处设置有船尾限位板
16,靠近船头处设置有船头限位板17,船头限位板17和船尾限位板16均高于固定导轨9,船尾限位板16和船头限位板17用于限制吊臂基座4在甲板平台2长度方向上的滑移范围。
43.参考图5,固定导轨9螺栓连接在甲板平台2上,升降导轨10沿竖直方向滑移设置,升降导轨10的两端均开设有滑移槽14,滑移槽14沿竖直方向贯穿设置;固定导轨9朝向升降导轨10的一端一体设置有与滑移槽14滑移配合的引导块15,甲板平台2上也焊接有与滑移槽14滑移配合的引导块15。
44.参考图5,甲板平台2上开设有容纳槽,升降导轨10降下后放置于容纳槽中,容纳槽中设置有升降千斤顶13,升降千斤顶13的活塞杆和缸体部分分别与升降导轨10和容纳槽的槽底连接;升降千斤顶13在每个升降导轨10的下方均匀设置有四个。
45.参考图2和图3,定位组件8包括定位板18和限定板19,定位板18焊接在吊臂基座4的两侧,限定板19焊接在甲板上,限定板19设置在靠近升降导轨10的一侧;定位板18上开设有多个定位孔20,限定板19上开设有多个限位孔21,限位孔21中贯穿插设有限位插销22;当吊臂基座4移动到升降导轨10处,且支撑块12放置到甲板平台2上时,定位孔20和限位孔21同轴设置,从而可以将限位插销22同时插设进定位孔20和限位孔21中,使得吊臂基座4能够与甲板相对稳定的固定在一起。
46.实施例2:
47.参考图6,一种臂架后移式浮式起重船,与实施例1的区别在于,定位组件8包括锁定板23、锁定卡齿24和定位卡齿25,锁定板23与甲板平台2转动连接,锁定板23在吊臂基座4的两侧各设有一个,定位卡齿25在吊臂基座4朝向锁定板23的两侧均设有;锁定卡齿24设置在锁定板23朝向吊臂基座4的一侧,每组锁定卡齿24设置有四个,每组定位卡齿25设置有三个,锁定卡齿24和定位卡齿25相互交错咬合设置;锁定卡齿24朝向吊臂基座4的一侧设置有导向面26,导向面26倾斜设置。
48.参考图6,锁定板23和甲板平台2之间设置有驱动千斤顶27,驱动千斤顶27的活塞杆和缸体部分分别与锁定板23和甲板平台2转动连接;当吊臂基座4移动到升降导轨10处,且支撑块12放置到甲板平台2上时,驱动千斤顶27推动锁定板23转动,使锁定板23呈竖直方向设置,从而使得锁定卡齿24与定位卡齿25相互咬合在一起,进而将吊臂底座与甲板平台2相对固定在一起。
49.本具体实施例仅仅是对本实用新型的解释,其并不是对本实用新型的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本实用新型的权利要求范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1