一种快速精确定位的智能叉车装置的制作方法
1.本实用新型属于智能叉车技术领域,更具体地说,特别涉及一种快速精确定位的智能叉车装置。
背景技术:
2.智能叉车结合条码技术、无线局域网技术和数据采集技术,形成现场作业系统;将企业管理系统延伸到作业人员的手掌中或叉车上,使其工作更方便、系统更智能;将无线车载终端装备到叉车上,由信息引导作业,这就是智能叉车的概念,叉车一般包括两个提升臂和升降装置,在搬运待运输的货物时,两个提升臂伸入待搬运货物的下方,然后升降装置控制两个提升臂上升,将待运输的货物托举,进而运输至其他位置。
3.基于上述,本发明人发现,目前叉车的两个提升臂距离一般是固定的,当待运输货物底部的宽度与两个叉车的提升臂宽度不一致时,就需要工作人员重新调整两个提升臂的距离,且目前通过人工调整两个提升臂宽度的方式,一方面工作较为繁琐,影响了工作效率,另一方面不能保证调整完成后的两个提升臂左右对称,严重时在运输过程中货物易发生倾倒,不便于使用。
4.于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种快速精确定位的智能叉车装置,以期达到更具有更加实用价值性的目的。
技术实现要素:
5.为了解决上述技术问题,本实用新型提供一种快速精确定位的智能叉车装置,以解决现有叉车的两个提升臂距离一般是固定的,当待运输货物底部的宽度与两个叉车的提升臂宽度不一致时,就需要工作人员重新调整两个提升臂的距离,且目前通过人工调整两个提升臂宽度的方式,一方面工作较为繁琐,影响了工作效率,另一方面不能保证调整完成后的两个提升臂左右对称,严重时在运输过程中货物易发生倾倒和智能化低的问题。
6.本实用新型快速精确定位的智能叉车装置的目的与功效,由以下具体技术手段所达成:
7.一种快速精确定位的智能叉车装置,包括连接装置;
8.所述连接装置底部安装有安装结构,且连接装置和安装结构前后两侧安装有限位板;
9.驱动装置,所述驱动装置安装在安装结构的内部;
10.提升装置,所述提升装置共设有两组,且两组提升装置安装在安装结构的内部;
11.加固装置,所述加固装置安装在两组提升装置的内部;
12.辅助固定装置,所述辅助固定装置共设有八组,且八组辅助固定装置安装在两组提升装置的内部;
13.稳定装置,所述稳定装置共设有两组,且两组稳定装置安装在两组提升装置的外侧。
14.进一步的,所述辅助固定装置包括:
15.安装块,安装块通过螺钉与滑动块固定连接;
16.限位轴,限位轴滑动连接在安装块的内部,且限位轴外端为半球形结构;
17.弹簧一,弹簧一固定安装在安装块与限位轴之间。
18.进一步的,所述安装结构包括:
19.安装座,安装座整体为长方体结构,且安装座顶部开设有燕尾槽,并且安装座内部开设有滑槽;
20.固定块,固定块固定安装在安装座的内部;
21.限位孔,限位孔开设在安装座内壁的两侧,且限位孔为半球形结构。
22.进一步的,所述提升装置包括:
23.滑动块,滑动块与安装座之间滑动连接,且滑动块为“十”字形结构;
24.提升臂,提升臂固定安装在滑动块的底部,且提升臂为“l”字形结构;
25.通孔,通孔共设有两个,且两个通孔贯穿开设在提升臂的内部。
26.进一步的,所述连接装置包括:
27.底座,底座为长方形板状结构,且底座底部固定安装有燕尾型滑块;
28.连接板,连接板固定安装在底座的顶部,且连接板为u型结构;
29.固定钉,固定钉共设有三个,且三个固定钉螺纹连接在连接板的左侧。
30.进一步的,所述稳定装置包括:
31.安装板,安装板为长方形板状结构,且安装板两端设有圆角,并且安装板通过螺钉与提升臂固定连接;
32.稳定轴,稳定轴共设有两个,且两个稳定轴滑动连接在安装板的内部,并且两个稳定轴内端滑动连接在两个通孔的内部;
33.支撑板,支撑板固定安装在两个稳定轴的外端,且支撑板外端固定安装有防滑垫;
34.弹簧二,弹簧二共设有三个,且三个弹簧二固定安装在安装板和支撑板之间。
35.进一步的,所述加固装置包括:
36.加固板,加固板共设有两个,且两个加固板与安装座之间固定连接;
37.加固轴,加固轴固定安装在两个加固板之间,且加固轴与两个提升臂之间滑动连接,并且加固轴为“十”字形结构。
38.进一步的,所述驱动装置包括:
39.伺服电机,伺服电机通过螺钉与安装座固定连接;
40.丝杆,丝杆固定安装在伺服电机的前端,且丝杆外壁开设有双向螺纹,并且丝杆转动连接在固定块的内部。
41.与现有技术相比,本实用新型具有如下有益效果:
42.1、本实用新型伺服电机的设置,使得丝杆在转动时更加精确,滑动块为“十”字形结构的设置,避免了丝杆承受较高的重量,避免了丝杆的损坏,提高了丝杆的使用寿命,加固轴的设置,提高了两个提升臂的使用稳定性,丝杆外壁开设有双向螺纹的设置,使得两组提升装置同时实现反向移动,同时使得两组提升装置左右对称,避免了两组提升装置顶部货物的倾倒。
43.2、本实用新型底座和安装座之间通过燕尾槽滑动连接,且底座和安装座前后两侧
通过螺钉固定安装有限位板的设置,当连接板磨损严重或损坏时,便于工作人员更换,减少了维修成本,三个固定钉的设置,使得连接板与叉车本体之间连接更加牢固,避免了装置在使用时发生晃动。
44.3、本实用新型八组辅助固定装置的设置,避免了两个滑动块发生移动,提高了两组提升装置的定位准确性,两组稳定装置的设置,使得两组提升装置与货物托盘之间紧密贴合,且不会因用力过大对货物托盘造成损坏,并且避免了两组提升装置顶部货物的掉落。
附图说明
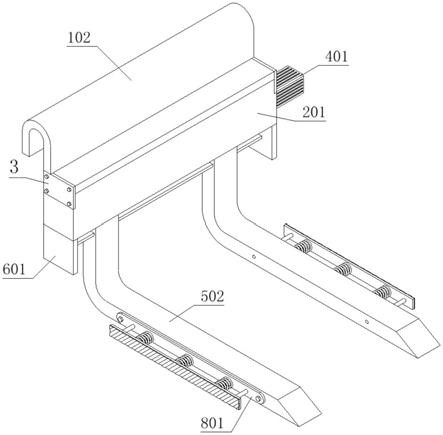
45.图1是本实用新型的立体结构示意图。
46.图2是本实用新型的另一视角结构示意图。
47.图3是本实用新型的分解结构示意图。
48.图4是本实用新型安装座中心剖切后的结构示意图。
49.图5是本实用新型辅助固定装置中心剖切后的结构示意图。
50.图6是本实用新型稳定装置的结构示意图。
51.图7是本实用新型另一实施例的结构示意图。
52.图中,部件名称与附图编号的对应关系为:
53.1、连接装置;101、底座;102、连接板;103、固定钉;
54.2、安装结构;201、安装座;202、固定块;203、限位孔;
55.3、限位板;
56.4、驱动装置;401、伺服电机;402、丝杆;
57.5、提升装置;501、滑动块;502、提升臂;503、通孔;
58.6、加固装置;601、加固板;602、加固轴;
59.7、辅助固定装置;701、安装块;702、限位轴;703、弹簧一;
60.8、稳定装置;801、安装板;802、稳定轴;803、支撑板;804、弹簧二。
具体实施方式
61.下面结合附图和实施例对本实用新型的实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不能用来限制本实用新型的范围。
62.在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
63.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
64.实施例:
65.如附图1至附图7所示:
66.本实用新型提供一种快速精确定位的智能叉车装置,包括连接装置1;
67.连接装置1底部安装有安装结构2,且连接装置1和安装结构2前后两侧安装有限位板3;
68.驱动装置4,驱动装置4安装在安装结构2的内部;
69.提升装置5,提升装置5共设有两组,且两组提升装置5安装在安装结构2的内部;
70.加固装置6,加固装置6安装在两组提升装置5的内部;
71.辅助固定装置7,辅助固定装置7共设有八组,且八组辅助固定装置7安装在两组提升装置5的内部;
72.稳定装置8,稳定装置8共设有两组,且两组稳定装置8安装在两组提升装置5的外侧。
73.其中,连接装置1包括:
74.底座101,底座101为长方形板状结构,且底座101底部固定安装有燕尾型滑块;
75.连接板102,连接板102固定安装在底座101的顶部,且连接板102为u型结构;
76.固定钉103,固定钉103共设有三个,且三个固定钉103螺纹连接在连接板102的左侧,安装结构2包括:
77.安装座201,安装座201整体为长方体结构,且安装座201顶部开设有燕尾槽,并且安装座201内部开设有滑槽;
78.固定块202,固定块202固定安装在安装座201的内部;
79.限位孔203,限位孔203开设在安装座201内壁的两侧,且限位孔203为半球形结构,底座101和安装座201之间通过燕尾槽滑动连接,且底座101和安装座201前后两侧通过螺钉固定安装有限位板3的设置,当连接板102磨损严重或损坏时,便于工作人员更换,减少了维修成本,三个固定钉103的设置,使得连接板102与叉车本体之间连接更加牢固,避免了装置在使用时发生晃动。
80.其中,驱动装置4包括:
81.伺服电机401,伺服电机401通过螺钉与安装座201固定连接;
82.丝杆402,丝杆402固定安装在伺服电机401的前端,且丝杆402外壁开设有双向螺纹,并且丝杆402转动连接在固定块202的内部,提升装置5包括:
83.滑动块501,滑动块501与安装座201之间滑动连接,且滑动块501为“十”字形结构;
84.提升臂502,提升臂502固定安装在滑动块501的底部,且提升臂502为“l”字形结构;
85.通孔503,通孔503共设有两个,且两个通孔503贯穿开设在提升臂502的内部,加固装置6包括:
86.加固板601,加固板601共设有两个,且两个加固板601与安装座201之间固定连接;
87.加固轴602,加固轴602固定安装在两个加固板601之间,且加固轴602与两个提升臂502之间滑动连接,并且加固轴602为“十”字形结构,伺服电机401的设置,使得丝杆402在转动时更加精确,滑动块501为“十”字形结构的设置,避免了丝杆402承受较高的重量,避免了丝杆402的损坏,提高了丝杆402的使用寿命,加固轴602的设置,提高了两个提升臂502的使用稳定性,丝杆402外壁开设有双向螺纹的设置,使得两组提升装置5同时实现反向移动,
同时使得两组提升装置5左右对称,避免了两组提升装置5顶部货物的倾倒。
88.其中,辅助固定装置7包括:
89.安装块701,安装块701通过螺钉与滑动块501固定连接;
90.限位轴702,限位轴702滑动连接在安装块701的内部,且限位轴702外端为半球形结构;
91.弹簧一703,弹簧一703固定安装在安装块701与限位轴702之间,稳定装置8包括:
92.安装板801,安装板801为长方形板状结构,且安装板801两端设有圆角,并且安装板801通过螺钉与提升臂502固定连接;
93.稳定轴802,稳定轴802共设有两个,且两个稳定轴802滑动连接在安装板801的内部,并且两个稳定轴802内端滑动连接在两个通孔503的内部;
94.支撑板803,支撑板803固定安装在两个稳定轴802的外端,且支撑板803外端固定安装有防滑垫;
95.弹簧二804,弹簧二804共设有三个,且三个弹簧二804固定安装在安装板801和支撑板803之间,八组辅助固定装置7的设置,避免了两个滑动块501发生移动,提高了两组提升装置5的定位准确性,两组稳定装置8的设置,使得两组提升装置5与货物托盘之间紧密贴合,避免了两组提升装置5顶部货物的掉落。
96.在另一实施例中,参考附图7,在连接板102上环形开设固定孔,且在固定钉103内部贯穿开设连接孔,并且在连接孔内部螺纹连接限位螺钉,通过该方式避免了固定钉103在长时间使用时发生松动,提高了装置的使用稳定性。
97.本实施例的具体使用方式与作用:
98.本实用新型使用时,首先工作人员通过连接板102与叉车本体连接,然后工作人员通过扳手将三个固定钉103拧紧,使得连接板102与叉车本体之间连接更加牢固,避免了装置在使用时发生晃动,然后根据货物底部的宽度通过伺服电机401调节两个提升臂502的间距,伺服电机401使得丝杆402在转动时更加精确,丝杆402外壁开设有双向螺纹使得两组提升装置5同时实现反向移动,同时使得两组提升装置5左右对称,避免了两组提升装置5顶部货物的倾倒,当两个提升臂502伸入在货物底部时,在通过伺服电机401控制两个提升臂502向外移动,使得两个支撑板803与货物托盘之间贴合,避免了两个提升臂502顶部货物的晃动,提高了运输的稳定性。
99.本实用新型未详述之处,均为本领域技术人员的公知技术。
100.本实用新型的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本实用新型限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本实用新型的原理和实际应用,并且使本领域的普通技术人员能够理解本实用新型从而设计适于特定用途的带有各种修改的各种实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1