一种智能仓储物流层数可调节货架的制作方法
1.本实用新型涉及仓储物流技术领域,具体涉及一种智能仓储物流层数可调节货架。
背景技术:
2.随着工业化进程的加剧,物流行业也进入了蓬勃发展的时期,对于物流管理有了更进一步的需求,随着这种提高效益节约成本的需求的日益趋强,物流行业中的仓库的进一步的自动化显得日益紧迫。rdc料盒库目前多数都是传统的汽车零部件仓储库,辅以les系统进行管理,库房内零件全部以地堆形式作定置定位库位管理,零部件归位和拣选操作均为人工操作,操作效率低,归位拣料全靠工人熟悉度,存在资源浪费。本实用新型对无人仓打造过程中的货架进行设计,完美搭配无人仓。
技术实现要素:
3.本实用新型提供一种智能仓储物流层数可调节货架,通过设计标准、新颖、独特的货架,在满足仓储管理要求的前提下配合小车运输和物资存储,辅助汽车零部件无人仓的落地实施,达成减员增效,促进公司降本。
4.为达到以上目的,本实用新型采取如下技术方案:
5.一种智能仓储物流层数可调节货架,包括支撑座和可拆卸的设置于支撑座上部的货架主体,所述货架主体由四个立柱和连接四个所述立柱的盖板,其特征在于,所述盖板包括支撑座盖板和多个上层盖板,所述货架主体由所述盖板分隔为多个独立的仓储单元;所述立柱上设置有若干个用于固定所述上层盖板的孔洞,所述盖板的边缘固定设置有突出于同一侧的挡板。
6.进一步的,所述支撑座由四个支撑腿和网格状支撑面组成,所述支撑座盖板设置于所述支撑面上部,并使所述挡板设置于所述支撑面的外侧。
7.进一步的,所述盖板的四个角上设置有通孔,四个角上与所述挡板连接的部分设置有可供所述立柱穿过的直角孔。
8.进一步的,所述支撑腿为中空的方管,所述立柱穿过所述支撑座盖板一端插入所述支撑腿内部。
9.进一步的,所述立柱与盖板通过阀栓固定,所述阀栓为柱状的直角折弯,在所述阀栓一端的端头设置直径大于阀栓的栓帽。
10.进一步的,在所述挡板的角上设置有栓孔,使固定所述盖板时栓孔的位置与所述立柱上的孔洞位置一致。
11.进一步的,在所述支撑座盖板的底部中心位置设置有感应识别标签。
12.进一步的,所述感应识别标签为二维码。
13.进一步的,所述网格状支撑面中部形成与无人驾驶机器人顶部固定部结构一致的网格。
14.本实用新型一种智能仓储物流层数可调节货架与现有技术相比具有以下有益技术效果:本实用新型根据无人物流仓存储运输需求设计,底部支撑座的设计便于无人驾驶机器人在背负时能够有效的固定货架的位置,运输过程中更稳固的驾驶。采用可调节的多层设计,可以放置更多的物品及品种,同时可以根据需要放置货物的大小自主调节各层之间的间距,存储效率更佳。
附图说明
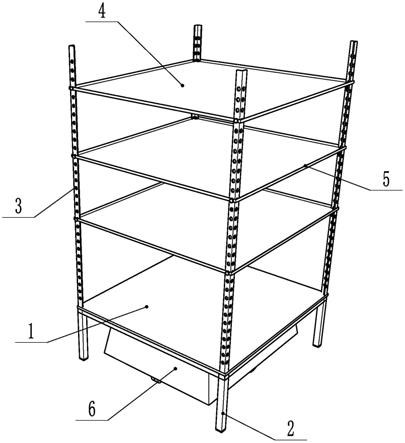
15.图1为本实用新型一种智能仓储物流层数可调节货架的结构示意图。
16.图2为本实用新型一种智能仓储物流层数可调节货架中支撑座的结构示意图。
17.图3为本实用新型一种智能仓储物流层数可调节货架中阀栓连接部位的结构示意图。
18.附图中,1为支撑座盖板,2为支撑腿,3为立柱,4为上层盖板,5为挡板,6为无人驾驶机器人,7为支撑面,10为孔洞,12为阀栓,13为栓帽。
具体实施方式
19.下面结合附图进一步阐述本实用新型的具体实施方式,对本实用新型实施例中的技术方案进行清楚、完整的描述。
20.在本实用新型的描述中,需要理解的是,术语“上部”、“外侧”、“内部”、“顶部”、“中部”、“向上”、“向下”等指示的方位或位置关系为基于使用时的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型保护范围的限制。
21.一种智能仓储物流层数可调节货架,包括支撑座和可拆卸的设置于支撑座上部的货架主体,货架主体由四个立柱3和连接四个立柱3的盖板,盖板包括支撑座盖板1和多个上层盖板4,货架主体由盖板分隔为多个独立的仓储单元;立柱3上设置有若干个用于固定上层盖板4的孔洞10,盖板的边缘固定设置有突出于同一侧的挡板5。
22.多个上层盖板4之间的距离可以随意调节,采用可调节的多层设计,可以放置更多的物品及品种,同时可以根据需要放置货物的大小自主调节各层之间的间距,存储效率更佳。支撑座盖板1与上层盖板4结构相同,在使用时上层盖板4为支撑座盖板1翻转后得到,即上层盖板4边缘突出设置的挡板5向上设置,防止在运输过程中货物发生滑动摔下货架,造成质量风险或安全问题;支撑座盖板1边缘突出设置的挡板5向下设置于支撑面7的外侧,使支撑面7固定更牢固,防止支撑座盖板1相对于支撑面7发生滑动,造成事故。
23.为了便于无人驾驶机器人6驶入并顺利运输,支撑座由四个支撑腿2和网格状支撑面7组成,支撑座盖板1设置于支撑面7上部,并使挡板5设置于支撑面7的外侧。支撑腿2的高度与无人驾驶机器人6高度一致,使无人驾驶机器人6可以顺利驶入,支撑面7的大小略大于无人驾驶机器人6。
24.为了使立柱3与盖板之间的固定更加牢固,盖板的四个角上设置有通孔(附图中未标注),四个角上与挡板5连接的部分设置有可供立柱3穿过的直角孔(附图中未标注)。
25.为了使立柱3的支撑更加牢固,支撑腿2为中空的方管,立柱3穿过支撑座盖板1一端插入支撑腿2内部。立柱3的底端穿入支撑腿2的内部,上部通过多个盖板连接固定,四个
立柱3之间将支撑座、盖板可拆卸的连接在一起,使各部件之间固定更加牢固,安全性高。
26.立柱3与盖板通过阀栓12固定,阀栓12为柱状的直角折弯,在阀栓12一端的端头设置直径大于阀栓12的栓帽13。在挡板5的角上设置有栓孔(附图中未标示),使固定盖板时栓孔的位置与立柱3上的孔洞10位置一致。在固定时,阀栓12依次穿过挡板5上的栓孔、立柱3上的孔洞10、盖板上的通孔,栓帽13的直径大于立柱3上的孔洞10的直径,使阀栓12上的栓帽13露出立柱3起到挡块的作用。
27.为了防止运输货物选择错误,在支撑座盖板1的底部中心位置设置有感应识别标签(附图中未标示)。无人驾驶机器人6扫描底部的感应识别标签获取货架信息,与系统内部的信息比对,比对无误后进行运输,防止运输错误;同时,感应识别标签设置于底部中心,也用于辅助无人驾驶机器人定位,使支撑的中心部位与货架的中心一致,防止运输时支撑中心偏移造成的货架失去平衡货物倒塌事故。尤其是对于高度较高的货架,如果支撑中心发生偏移更容易发生事故。
28.在一具体实施例中,感应识别标签为二维码。
29.在一具体实施例中,网格状支撑面7中部形成与无人驾驶机器人6顶部固定部结构一致的网格。在运输过程中,无人驾驶机器人6顶部的固定部刚好卡在支撑面7中部的网格内,防止在运输中支撑座与无人驾驶机器人6之间发生滑移。
30.在一具体实施例中,支撑腿2的底部还设置有脚垫,防止货架滑动和货架对地面的磨损。
31.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解;其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型实施例技术方案的范围,其均应涵盖在本实用新型的权利要求和说明书的范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1