菌包装袋窝口插棒装框一体机的制作方法
1.本实用新型涉及菌包加工设备技术领域,具体为一种菌包装袋窝口插棒装框一体机。
背景技术:
2.现代化木耳种植栽培菌包在加工过程,包括进料工位、窝口插棒工位和装框工位,菌菇基料通过进料设备输送至菌袋内,菌包通过窝口插棒设备进行密实插棒,最后通过装框机构定量装框。
3.进料设备采用卧式螺旋输送机进行送料,现有技术中,空的菌袋需要人工套在进料设备的料筒上,该作业方式存在效率低、工作负荷大的缺陷。
4.因此,如何克服上述存在的技术问题和缺陷成为重点需要解决的问题。
技术实现要素:
5.本实用新型的目的在于提供一种菌包装袋窝口插棒装框一体机,以解决上述背景技术中提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:菌包装袋窝口插棒装框一体机,包括进料设备、窝口设备和装框设备,所述进料设备包括进料设备架、送料机构、取袋机构、张袋机构和移袋机构,所述取袋机构包括取袋支架以及设置在取袋支架上的取袋组件,所述取袋组件包括菌袋支撑平台、吸盘支架和第五驱动部件,所述吸盘支架通过第五驱动部件在取袋支架上沿水平方向移动,所述吸盘支架上设置第一驱动部件,所述第一驱动部件上设置第一吸盘,所述吸盘支架上设置与第一吸盘位置相对应的第二吸盘。
7.进一步地,所述张袋机构包括张袋支撑板、第二驱动部件、左张袋板和右张袋板,所述第二驱动部件的输出轴设置齿轮,所述左张袋板和右张袋板与张袋支撑板滑动连接,所述左张袋板和右张袋板的一端分别设置一根与齿轮啮合的直齿条,两根直齿条在第二驱动部件和齿轮的作用下相向或背向运动,所述左张袋板和右张袋板的另一端设置弧形板。
8.进一步地,所述移袋机构包括升降组件和平移组件,所述升降组件包括升降板、升降支架和第三驱动部件,所述升降板通过第三驱动部件在升降支架上沿竖直方向移动,所述张袋机构设置在升降板上;所述平移组件包括平移支架和第四驱动部件,所述升降支架通过第四驱动部件在平移支架上沿水平方向移动。
9.进一步地,所述第一驱动部件和第五驱动部件均为伸缩气缸,所述第二驱动部件为旋转电机,所述第三驱动部件和第四驱动部件为电机。
10.进一步地,所述取袋组件为对称布置在取袋支架上的两套,所述张袋组件为对称布置在升降板上的两套。
11.进一步地,所述送料机构包括送料支架、送料电机、料箱和料筒,所述送料电机的输出轴传动连接螺旋送料轴,所述螺旋送料轴位于料箱和料筒内。
12.与现有技术相比,本实用新型的有益效果是:
13.本实用新型公开的菌包装袋窝口插棒装框一体机,通过增设取袋机构、张袋机构和移袋机构,取袋机构利用吸盘将菌袋自动取出,张袋机构用于将菌袋的敞口端自动撑开,移袋机构用于将撑开后的菌袋自动在送料设备的料筒外,以此实现自动取袋、张袋和套袋作业,提高了菌菇生产效率。
附图说明
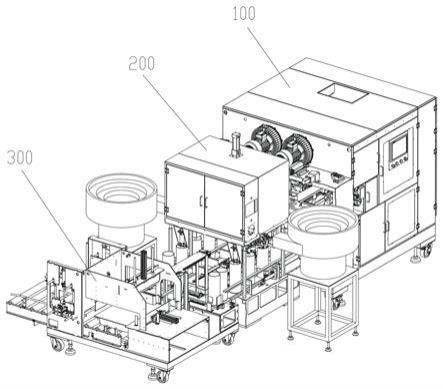
14.图1为本实用新型的结构示意图;
15.图2为本实用新型进料设备的内部结构示意图;
16.图3为本实用新型取袋机构的结构示意图;
17.图4为本实用新型套袋机构的结构示意图。
18.主要元件符号说明:
19.100
‑
进料设备,111
‑
进料设备架,121
‑
送料支架,122
‑
送料电机,123
‑
料箱,124
‑
料筒,131
‑
取袋支架,132
‑
菌袋支撑平台,133
‑
吸盘支架,134
‑
第五驱动部件,135
‑
第一滑动组件,136
‑
第一驱动部件,137
‑
第一吸盘,138
‑
第二吸盘,141
‑
张袋支撑板,142
‑
第二驱动部件,143
‑
左张袋板,144
‑
右张袋板,145
‑
齿轮,146
‑
第二滑动组件,147
‑
直齿条,148
‑
弧形板,151
‑
升降板,152
‑
升降支架,153
‑
第三驱动部件,154
‑
第三滑动组件,161
‑
平移支架,162
‑
第四驱动部件,163
‑
第四移动组件,200
‑
窝口设备,300
‑
装框设备。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.请参阅图1
‑
4,本实用新型提供一种技术方案:菌包装袋窝口插棒装框一体机,包括进料设备100、窝口设备200和装框设备300。
22.进料设备100包括进料设备架111、送料机构、取袋机构、张袋机构和移袋机构。
23.送料机构包括送料支架121、送料电机122、料箱123和料筒124,送料电机122的输出轴传动连接螺旋送料轴(图中未标示),螺旋送料轴位于料箱123和料筒124内,送料电机122、料箱123、料筒124和螺旋送料轴为两套,送料电机122的输出轴通过链条或皮带与两根螺旋送料轴传动连接。
24.取袋机构包括取袋支架131以及设置在取袋支架131上的取袋组件,取袋组件包括菌袋支撑平台132、吸盘支架133和第五驱动部件134,取袋支架131与进料设备架111固定连接,菌袋支撑平台132与取袋支架131固定连接,吸盘支架133通过第一滑动组件135与取袋支架131滑动连接,吸盘支架133上设置第一驱动部件136,第一驱动部件136的下端固定连接第一吸盘137,吸盘支架133上设置与第一吸盘137位置相对应的第二吸盘138,第五驱动部件134与取袋支架131固定连接,第五驱动部件134的输出轴与吸盘支架133装配连接。取袋组件为对称布置在为对称布置在取袋支架131上的两套。
25.张袋机构为两套,张袋机构包括张袋支撑板141、第二驱动部件142、左张袋板143和右张袋板144,第二驱动部件142与张袋支撑板141固定连接,第二驱动部件142的输出轴
设置齿轮145,左张袋板143和右张袋板144的中部分别通过第二滑动组件146与张袋支撑板141滑动连接,左张袋板143和右张袋板144的上端分别固定连接一根与齿轮145啮合的直齿条147,两根直齿条147在齿轮145的作用下相向或背向运动,左张袋板143和右张袋板144的下端设置弧形板148。
26.移袋机构包括升降组件和平移组件,升降组件包括升降板151、升降支架152和第三驱动部件153,升降板151通过第三滑动组件154与升降支架152滑动连接,两套张袋组件为对称布置在升降板151上的两套;平移组件包括平移支架161和第四驱动部件162,升降支架152通过第四移动组件163与平移支架161滑动连接。
27.第五驱动部件134和第一驱动部件136均为伸缩气缸,第二驱动部件142为旋转电机,第三驱动部件153和第四驱动部件162为电机。第一滑动组件135、第二滑动组件146、第三滑动组件154和第四滑动组件163采用直线滑轨和滑块。第三驱动部件153和第四驱动部件162的输出轴分别与升降板151和升降支架152上的滑块螺纹传动。
28.窝口设备200包括压实机构和压块机构,窝口设备200、装框设备300采用现有设计。
29.本实用新型的取袋和套袋工作原理为:
30.取袋机构中吸盘支架133的初始位置位于取袋工位,取袋工位具体是靠近菌袋支撑平台132的位置(如图3),两个菌袋到达取袋工位后,第一驱动部件136伸长,位于其下端的第一吸盘137向下移动,真空发生器工作,第一吸盘137和第二吸盘138相互配合将菌袋敞口端打开,随后,在第五驱动部件134的拉动下,从取袋工位移动至张袋工位;菌袋到达张袋工位后,在第四驱动部件162的推动下,张袋机构和升降组件作为一个整体向张袋工位移动,张袋机构的两组弧形板148伸入菌袋内,第二驱动部件142顺时针转动,两个弧形板148背向移动,将菌袋撑圆,需指出的是,此时两套取袋组件回归初始工位,等待下一次取袋作业。张袋组件在第三驱动部件153的驱动下,将菌袋下降或上升至套袋工位,平移组件带动菌袋朝向料筒的方向移动,同时将两个菌袋套在两个料筒外,菌袋套在料筒外后,取袋机构、张袋机构退回至张袋工位,完成自动取袋、张袋和套袋的一个循环。窝口设备、装框设备的工作原理为现有,故未赘述。
31.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1