垃圾回收系统
1.本技术涉及垃圾处理领域,特别涉及一种垃圾回收系统。
背景技术:
2.随着城市化的推进,社区规模不断扩大,而垃圾处理点更是不断往外迁移。因此对于一些住户来说,将生活垃圾带往垃圾处理点是一件麻烦的事情,于是有的住户选择就地遗弃垃圾,从而影响环境卫生。
技术实现要素:
3.本技术旨在至少解决现有技术中存在的技术问题之一。为此,本技术提出一种垃圾回收系统,能够将垃圾带至垃圾处理点,方便使用,提升环境卫生。
4.一种垃圾回收系统,包括:
5.agv载具,设置有显示器,所述显示器用于显示供用户扫描的二维码;
6.收集桶,可拆卸地设置在agv载具上,所述收集桶包括桶体、桶盖和电控锁,桶体具有开口,所述桶盖的第一端铰接所述桶体上,并且铰接处位于所述开口的边缘处,所述电控锁用于将所述桶盖的第二端锁定于关闭位置,或者解除对所述关闭位置的锁定;
7.云端服务器,用于接收通讯模块发送的扫码信号,并根据所述扫码信号发送控锁信号至通讯模块;
8.通讯模块,用于接收用户的扫码信号并发送所述扫码信号至云端服务器,还用于接收所述控锁信号并发送所述控锁信号至控制模块,所述通讯模块设置在所述agv载具上;
9.控制模块,设置在所述agv载具上,并且所述控制模块分别与所述通讯模块以及agv模块电连接,所述控制模块用于接收通讯模块发送的所述控锁信号控制所述电控锁锁定或解锁。
10.根据本技术实施例的垃圾回收系统,至少具有如下技术效果:设置显示器显示二维码信息,供用户扫描使用,快捷方便;同时,使用显示器,使得运营方可以随时更换二维码信息,以切换不同的服务内容;设置云端服务器可以集中管理用户的需求和订单,还可以管理各个agv载具的运行路线,进而达到车路协同,使各个agv载具错开到达垃圾处理点的时间,从而使各个agv载具均有充足的时间卸下收集桶;使用电控锁,防止在agv载具的输送途中桶盖翻开,导致垃圾散落,同时也便于管理和控制。
11.根据本技术实施例,还包括限位器,所述限位器包括,限位筒、限位块和弹性部件,所述限位筒内部具有空腔,所述收集桶可插接在所述空腔内,所述限位块活动设置所述限位筒上,所述限位筒的侧壁上排列设置有多个挖空部,所述挖空部与所述空腔连通;所述限位块包括主体部和凸起部,所述主体部和凸起部共面设置,并且凸起部突出于所述主体部一侧,凸起部的表面和主体部的表面之间平滑过渡,所述限位块的凸起部可穿过所述挖空部插入至所述空腔内;所述弹性部件两端分别与所述限位筒和限位块连接,所述弹性部件对所述限位块施加作用力,使得所述限位块具有向所述限位筒的内部方向运动的趋势。
12.根据本技术实施例,所述挖空部沿从所述限位筒的内部到外部的方向延伸设置,形成滑动通道,所述限位块滑动设置在所述滑动通道内,并且其凸起部朝向空腔,所述弹性部件是弹簧,所述弹性部件设置在限位通道内,所述弹性部件一端与限位块连接与限位筒连接。
13.根据本技术实施例,还包括称重模块,所述称重模块设置在所述收集桶和所述agv载具之间,所述称重模块与所述控制模块电连接。
14.根据本技术实施例,所述桶体具有内胆和外胆,所述内胆和外胆之间的区域设有中空部分,所述中空部分用于隔热。
15.根据本技术实施例,还包括压力平衡装置,所述压力平衡装置包括气压传感器和电控阀,所述气压传感器以及所述电控阀均与所述控制模块电连接,所述气压传感器用于收集所述收集桶内的气压数据并输送至所述控制模块,所述电控阀根据控制模块的指令开闭,以平衡所述收集桶内外的压力。
16.根据本技术实施例,还包括导航模块。
17.根据本技术实施例,所述导航模块包括磁导航传感器和导航磁带,所述导航磁带铺设于所述agv模块的预设运动路径上,所述磁导航传感器设置在所述agv载具上,并且位于所述agv载具的底部,所述磁导航传感器与所述控制模块电连接,所述磁导航传感器用于与所述导航磁带配合获取位置信息。
18.根据本技术实施例,还包括翻盖结构,所述翻盖结构用于驱动所述桶盖转动,所述翻盖结构与所述控制模块电连接。
19.根据本技术实施例,所述翻盖结构包括连杆组以及驱动电机,所述连杆组包括第一连杆和第二连杆,所述第一连杆转动设置在所述收集桶上,并且所述第一连杆的一端与所述第二连杆的一端铰接,所述第二连杆的另一端与所述桶盖铰接,所述驱动电机通过传动部件与所述第一连杆连接。
20.本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
附图说明
21.图1为本技术的垃圾回收系统的系统示意图;
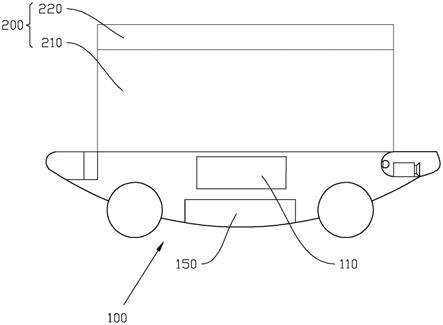
22.图2为图1所示的垃圾回收系统中agv载具的结构示意图;
23.图3为本技术实施例的垃圾回收系统中的其中一种限位器及收集桶的剖面结构示意图;
24.图4为本技术实施例的垃圾回收系统中的其中一种限位器及收集桶的剖面结构示意图;
25.图5为本技术实施例的垃圾回收系统中的连杆组的结构示意图。
26.附图标记:agv载具100;显示器110;通讯模块120;控制模块130;称重模块170;磁导航传感器150;收集桶200;桶体210;桶盖220;电控锁230;云端服务器200;限位筒141;限位块142;弹性部件143;缺口1411;主体部1421;凸起部1422;第一信号片;第二信号片;内胆211;外胆212;气压传感器410;电控阀420;第一连杆610;第二连杆620;手持终端800。
具体实施方式
27.下面详细描述本技术的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本技术,而不能理解为对本技术的限制。
28.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“轴向”、“径向”、“周向”、“正面”、“反面”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,除非另有说明,“多个”的含义是两个或两个以上。
29.下面参照图1对本技术的一种垃圾回收系统实施例进行阐述,包括:
30.agv载具100,设置有显示器110,所述显示器110用于显示供用户扫描的二维码;
31.收集桶200,可拆卸地设置在agv载具100上,所述收集桶200 包括桶体210、桶盖220和电控锁230,桶体210具有开口,所述桶盖220的第一端铰接所述桶体210上,并且铰接处位于所述开口的边缘处,所述电控锁230用于将所述桶盖220的第二端锁定于关闭位置,或者解除对所述关闭位置的锁定;
32.云端服务器200,用于接收通讯模块120发送的扫码信号,并根据所述扫码信号发送控锁信号至通讯模块120;
33.通讯模块120,用于接收用户的扫码信号并发送所述扫码信号至云端服务器200,还用于接收所述控锁信号并发送所述控锁信号至控制模块130,所述通讯模块120设置在所述agv载具100上;
34.控制模块130,设置在所述agv载具100上,并且所述控制模块130分别与所述控制模块130以及agv模块电连接,所述控制模块130用于接收通讯模块120发送的所述控锁信号控制所述电控锁 230锁定或解锁。
35.具体地,在使用时,用户通过手持终端800扫描二维码,并在手持终端800上选择相关的服务,手持终端800生成扫码信号发送至通讯模块120,通讯模块120转发至云端服务器200,云端服务器200 根据扫码信号生成控锁信号并发送给通讯模块120,通讯模块120将控锁信号转发给控制模块130,控制模块130根据控锁信号控制所述电控锁230锁定或解锁。
36.设置显示器110显示二维码信息,供用户扫描使用,快捷方便;同时,使用显示器110,使得运营方可以随时更换二维码信息,以切换不同的服务内容;设置云端服务器200可以集中管理用户的需求和订单,还可以管理各个agv载具100的运行路线,进而达到车路协同的效果,使各个agv载具100错开到达垃圾处理点的时间,从而使各个agv载具100均有充足的时间,用于卸下收集桶200;使用电控锁230,防止在agv载具100的输送途中,震动使得桶盖220 翻开,导致垃圾散落,同时也便于管理和控制。
37.具体地,有多种连接形式以实现收集桶200的可拆卸安装,以下列举其中一种具体连接形式予以说明,所述agv载具100上设置有限位器,所述限位器包括,限位筒141、限位块142和弹性部件143,所述限位筒141内部具有空腔,所述收集桶200可插接在所述空腔内,所述限位块142活动设置所述限位筒141上,所述限位筒141的侧壁上排列设置有多个挖空部
1411,所述挖空部1411与所述空腔连通;所述限位块142包括主体部1421和凸起部1422,所述主体部1421 和凸起部1422共面设置,并且凸起部1422突出于所述主体部1421 一侧,凸起部1422的表面和主体部1421的表面之间平滑过渡,所述限位块142的凸起部1422可穿过所述挖空部1411插入至所述空腔内;所述弹性部件143两端分别与所述限位筒141和所述限位块142连接,所述弹性部件143对所述限位块142施加作用力,使得所述限位块 142具有向所述限位筒141的内部方向运动的趋势,使得当收集桶200 插接在限位筒141内部时,限位块142的凸起部1422与收集桶200 的表面抵接。
38.此外,所述限位筒141的底部具有第一信号片,第一信号片与控制模块130电连接,所述收集桶200的底部具有第二信号片,第二信号片与电控锁230电连接,当收集桶200插接在限位筒141内时,第二信号片可以与第一信号片接触,以传递所述控锁信号。
39.进一步地,所述凸起部1422的形状呈波峰型或弧面型。
40.具体地,在使用时,在弹性部件143的作用下,所述限位块142 的凸起部1422会始终紧贴着所述收集桶200的表面,多个限位块142 互相配合夹持住收集桶200,能够兼容不同尺寸的收集桶200,不同尺寸形状的收集桶200可应用在不同的场景,进而使本技术的垃圾回收系统适应更多的使用情景。此外弹性部件143还能够吸收一部分 agv载具100在输送途中的振动,使得收集桶200更加平稳;凸起部1422的表面和主体部1421的表面之间平滑过渡,以防止收集桶 200卡在限位块142上,导致收集桶200不能顺利插在在限位筒141 内。
41.更进一步地,所述限位筒141和所述限位块142之间有多种连接形式,以下列举其中两种连接形式予以说明,在第一种连接形式中,所述限位块142滑动设置在所述限位筒141上,在第二种连接形式中,所述限位块142转动设置在所述限位筒141上。
42.以下以一个具体实施例的形式举例说明限位筒141和所述限位块142之间的第一种连接形式,所述挖空部1411沿从所述限位筒141 的内部到外部的方向延伸设置,形成滑动通道,所述限位块142滑动设置在所述滑动通道内,并且其凸起部1422朝向空腔,所述弹性部件143是弹簧,所述弹性部件143设置在限位通道内,所述弹性部件 143一端与限位块142连接,并且连接处位于所述限位块142背对所述凸起部1422的一侧,另一端与限位筒141连接。
43.以下以一个具体实施例的形式举例说明限位筒141和所述限位块142之间的第二种连接形式,所述挖空部1411贯通所述限位筒141 侧壁的内壁面以及外壁面,所述限位块142铰接通过转轴铰接在所述限位筒141侧壁的外壁面上,并且凸起部1422朝向所述空腔;所述弹性部件143是卷簧,所述卷簧套设在所述转轴上,并且所述弹性部件143一端与所述限位筒141连接,一端与所述限位块142连接。
44.在本技术的一些实施例中,还包括称重模块170,所述称重模块 170设置在所述收集桶200和所述agv载具100之间,所述称重模块170与所述控制模块130电连接。
45.具体地,设置称重模块170可以精确得知用户的垃圾质量,以方便计费运营。
46.更加进一步地,当设置有前述实施例中限位器时,所述称重模块 170设置在所述限位筒141的底部。
47.在本技术的一些实施例中,所述桶体210具有内胆211和外胆212,所述内胆211和外胆212之间的区域设有中空部分,所述中空部分用于隔热。
48.具体地,温度升高会加快垃圾发酵的速率,进而产生更多难闻的气味,在一些使用
情况中,所述收集桶200会受到太阳的直射,设置内胆211和外胆212,并且在内胆211和外胆212之间形成中空部分,用于隔热,减少因太阳直射造成收集桶200内温度升高的程度,进而减少垃圾发酵产生的发酵气体,从而减少臭气。
49.在本技术的一些实施例中,还包括压力平衡装置,所述压力平衡装置包括气压传感器410和电控阀420,所述气压传感器410以及所述电控阀420均与所述控制模块130电连接,所述气压传感器410用于收集所述收集桶200内的气压数据并输送至所述控制模块130,所述电控阀420根据控制模块130的指令开闭,以平衡所述收集桶200 内外的压力。
50.具体地,垃圾会自然发酵产生发酵气体,而所述收集桶200在闭合状态下,发酵气体会使收集桶200内的气压升高,在这种情况收集桶200被击穿的概率。因此设置压力平衡装置使得收集桶200内的气压与收集桶200外部的气压达到平衡,从而减少收集桶200被击穿的可能性。
51.进一步地,气压传感器410用于监控所述收集桶200内的气压,并向控制模块130发送气压信号,控制模块130根据气压信号,以控制电控阀420的开闭。当收集桶200内气压上升时,控制模块130控制电控阀420开启,以使收集桶200内外的气压得以平衡。
52.在本技术的一些实施例中,还包括导航模块。
53.具体地,所述导航模块包括磁导航传感器150和导航磁带,所述导航磁带铺设于所述agv模块的预设运动路径上,所述磁导航传感器150设置在所述agv载具100上,并且位于所述agv载具100 的底部,所述磁导航传感器150与所述控制模块130电连接,所述磁导航传感器150用于与所述导航磁带配合获取位置信息。
54.具体地,本技术的垃圾回收系统覆盖区域大,因此设置导航模块便于agv载具100获取位置信息,防止agv载具100偏航;此外,在社区等情景应用时,路径多且复杂,多个预设路径组合形成路径网,也便于所述云端规划各个agv载具100的路径,进一步提升车路协同的效果,提升道路的利用率。
55.在本技术的一些实施例中,还包括翻盖结构,所述翻盖结构用于控制所述桶盖220的姿态,所述翻盖结构设置在所述收集桶200上,并且与所述控制模块130电连接。
56.具体地,所述翻盖结构包括连杆组以及驱动电机,所述连杆组包括第一连杆610和第二连杆620,所述第一连杆610转动设置在所述收集桶上,并且所述第一连杆610的一端与所述第二连杆620的一端铰接,所述第二连杆620的另一端与所述桶盖220铰接,所述驱动电机通过传动部件与所述第一连杆610连接,所述驱动电机与所述控制模块130电连接。
57.深入的,所述第一连杆610铰接在所述桶体210的底部的外壁上,所述第二连杆620位于所述桶体210的外侧壁相对的区域上活动,通过如上设置,使得连杆组可以尽可能地贴合所述桶体210的轮廓,减少体积,利于设备小型化。
58.更具体地,所述传动部件包括套接在所述驱动电机上的输出轴的主动齿轮,以及设置在所述第一连杆610上的从动齿轮,所述主动齿轮和所述从动齿轮互相啮合。通过连杆组将电机转动的扭矩,转化为驱动桶盖220翻转的力。
59.以下以一个具体实施例的形式描述本技术的垃圾回收系统,参照图2,包括:
60.下面参照图1对本技术的一种垃圾回收系统实施例进行阐述,包括:
61.agv载具100,设置有显示器110,所述显示器110用于显示供用户扫描的二维码;
62.收集桶200,可拆卸地设置在agv载具100上,所述收集桶200 包括桶体210、桶盖
220和电控锁230,桶体210具有开口,所述桶盖220的第一端铰接所述桶体210上,并且铰接处位于所述开口的边缘处,所述电控锁230用于将所述桶盖220的第二端锁定于关闭位置,或者解除对所述关闭位置的锁定;所述桶体210具有内胆211和外胆 212,所述内胆211和外胆212之间的区域中空设置,所述中空部分用于隔热。
63.云端服务器200,用于接收通讯模块120发送的扫码信号,并根据所述扫码信号发送控锁信号至通讯模块120;
64.通讯模块120,用于接收用户的扫码信号并发送所述扫码信号至云端服务器200,还用于接收所述控锁信号并发送所述控锁信号至控制模块130,所述通讯模块120设置在所述agv载具100上;
65.控制模块130,设置在所述agv载具100上,并且所述控制模块130分别与所述控制模块130以及agv模块电连接,所述控制模块130用于接收通讯模块120发送的所述控锁信号控制所述电控锁 230锁定或解锁。
66.限位器,所述限位器包括,限位筒141、限位块142和弹性部件 143,所述限位块142活动设置所述限位筒141上。所述限位筒141 内部具有空腔,所述限位筒141侧壁上排列设置有多个挖空部1411;所述限位块142包括主体部1421和凸起部1422,所述主体部1421 和凸起部1422共面设置,并且凸起部1422突出于所述主体部1421 一侧,凸起部1422的表面和主体部1421的表面之间平滑过渡,所述限位块142的凸起部1422可穿过所述挖空部1411插入至所述空腔内;所述弹性部件143两端分别与所述限位筒141和限位块142连接,所述弹簧对所述限位块142施加作用力,使得限位块142具有向限位筒 141内部方向运动的趋势,使得当收集桶200插接在限位筒141内部时,限位块142对施加收集桶200的夹持力,所述凸起部1422的形状呈波峰型或弧面型。
67.压力平衡装置,所述压力平衡装置包括气压传感器410和电控阀 420,所述气压传感器410以及所述电控阀420均与所述控制模块130 电连接,所述气压传感器410设置在所述桶体210内,用于收集所述收集桶200内的气压数据并输送至所述控制模块130;所述电控阀420 设置在所述桶盖220上,所述电控阀420根据控制模块130的指令开闭,以平衡所述收集桶200内外的压力。
68.导航模块,所述导航模块包括磁导航传感器150和导航磁带,所述导航磁带铺设于所述agv模块的预设运动路径上,所述磁导航传感器150设置在所述agv载具100上,并且位于所述agv载具100 的底部,所述磁导航传感器150与所述控制模块130电连接,所述磁导航传感器150用于与所述导航磁带配合获取位置信息。
69.翻盖结构,所述翻盖结构用于控制所述桶盖220的姿态,所述翻盖结构包括连杆组以及驱动电机,所述连杆组包括第一连杆610和第二连杆620,所述第一连杆610转动设置在所述收集桶上,并且所述第一连杆610的一端与所述第二连杆620的一端铰接,所述第二连杆 620的另一端与所述桶盖220铰接,所述驱动电机通过传动部件与所述第一连杆610连接,所述驱动电机与所述控制模块130电连接,所述传动部件包括套接在所述驱动电机上的输出轴的主动齿轮,以及设置在所述第一连杆610上的从动齿轮,所述主动齿轮和所述从动齿轮互相啮合。
70.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结
构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
71.尽管已经示出和描述了本技术的实施例,本领域的普通技术人员可以理解:在不脱离本技术的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本技术的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1