具有清洗功能的垃圾输送设备及垃圾回收系统的制作方法
1.本发明涉及垃圾回收技术领域,尤其涉及一种具有清洗功能的垃圾输送设备及垃圾回收系统。
背景技术:
2.目前,城市每天产生的生活垃圾较多,人们在日常生活中,能够有效的进行干湿垃圾的分类,而对于干垃圾而言,其中部分垃圾是可以回收利用的。中国专利公告号cn 208390643 u公开了一种带自动输送功能的垃圾二次分拣平台,采用输送带的方式输送垃圾进行分拣。但是,由于干垃圾的垃圾袋中因用户分类不彻底依然会有液态的垃圾,在长时间使用后,会造成输送带严重污染而出现输送不畅的现象发生,导致设备的运行可靠性降低。鉴于此,如何设计一种能够自动清洗输送带以提高使用可靠性的设备是本实用新型所要解决的技术问题。
技术实现要素:
3.本发明提供一种具有清洗功能的垃圾输送设备,实现自动清洗输送带以提高设备运行可靠性。
4.本实用新型提供一种具有清洗功能的垃圾输送设备,包括:输送带、清洗机构和底座,所述底座上设置有接水槽,所述输送带设置在所述底座上并位于所述接水槽的上方;所述清洗机构包括喷淋臂、水箱和喷淋泵,所述喷淋臂通过所述喷淋泵与所述水箱连接,所述喷淋臂位于所述输送带的上方。
5.进一步的,所述喷淋臂位于所述接水槽的正上方。
6.进一步的,所述底座的上部还设置有延伸部,所述延伸部沿所述输送带的输送方向延伸布置。
7.进一步的,所述延伸部上设置有导流槽,所述导流槽连通所述接水槽。
8.进一步的,所述底座的下部还设置有排水槽,所述排水槽位于所述接水槽的下方并与所述接水槽连通。
9.进一步的,所述底座上设置有支撑架,所述喷淋臂设置在所述支撑架上。
10.进一步的,所述支撑架的外部还设置有围挡,所述围挡竖向布置。
11.进一步的,所述输送带的两侧分别布置有所述围挡。
12.本实用新型还提供一种垃圾回收系统,包括垃圾桶,还包括上述具有清洗功能的垃圾输送设备,所述垃圾桶布置在所述具有清洗功能的垃圾输送设备的输送带的外侧。
13.通过在输送带的上方配置喷淋臂,在通过输送带输送垃圾后,输送带会被垃圾遗留的污物所污染,此时,便可以启动喷淋泵,喷淋泵将水箱中的水通过喷淋臂朝向下方的输送带进行喷淋清洗,以实现自动对输送带进行清洗操作,避免输送带长时间粘附污垢而导致输送不畅,与此同时,输送带底部配置的底座上设置有接水槽,喷淋臂喷洒的水淋到输送带上后便落到底部的接水槽中实现污水的统一回收,以避免清理过程中,污水随意流动,方
便污水的统一收集和排放,实现自动清洗输送带以提高设备运行可靠性。
附图说明
14.图1为本实用新型具有清洗功能的垃圾输送设备的结构示意图;
15.图2为本实用新型具有清洗功能的垃圾输送设备中底座的结构示意图;
16.图3为本实用新型垃圾回收系统的结构示意图;
17.图4为图3中去掉外壳的结构示意图;
18.图5为图3中去掉外壳的结构原理图;
19.图6为本实用新型垃圾回收系统的纵向剖视图。
20.附图说明:
21.外壳1、垃圾投放口11、垃圾清运口12、人感器13、导向滑槽14;
22.倾斜面10、门窗111、门体121;
23.垃圾桶2、拖车架21;
24.定位框211、把手212;
25.第一破袋机构3、第一破袋部件31;
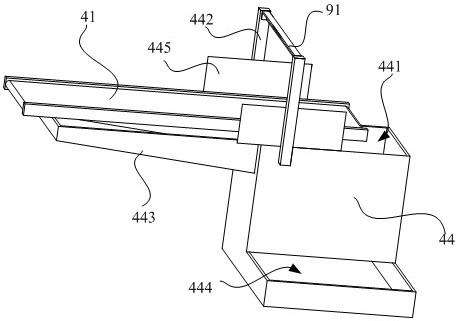
26.输送机构4、输送带41、摊平组件42、提升机43、底座44;
27.摊平平台421、振动器422、接水槽441、支撑架442、延伸部443、排水槽444、围挡445;
28.分拣机构5、机械手51、图像采集器52;
29.第二破袋机构6、第二破袋部件61;
30.拣袋机构7、移动模块71、夹爪72;
31.横向移动件711、纵向移动件712;
32.喷淋机构8、喷淋管81;
33.清洗机构9、喷淋臂91。
具体实施方式
34.实施例一,如图1-图2所示,本实用新型提供一种具有清洗功能的垃圾输送设备,包括:输送带41、清洗机构9和底座44,底座44上设置有接水槽441,输送带41设置在底座44上并位于接水槽441的上方;清洗机构9包括喷淋臂91、水箱和喷淋泵,喷淋臂91通过所述喷淋泵与所述水箱连接,喷淋臂91位于输送带41的上方。
35.具体的,对于输送带41而言,由于其上输送的是人们日常生活中产生的垃圾,长时间使用后,输送带41表面将会粘附垃圾遗留的污垢,进而造成输送带41运行不畅甚至出现卡死的现象。
36.在输送带41运行一定时间后,便可以通过清洗机构9对下方的输送带41进行清洗操作,在清洗过程中,所述喷淋泵将所述水箱中的水吸出并通过喷淋臂91向下方的输送带41喷射水,进而实现对输送带41表面进行清洗操作。
37.在清洗输送带41的过程中,所产生的废水则流入到底座44上形成的接水槽441中,以实现废水的回收和统一排放。
38.而在清洗时,还可以在所述水箱中添加清洁剂或抑菌剂等,一方面可以更加全面
有效的对输送带41进行清洗,另一方面还可以对输送带41起到杀菌的作用。
39.其中,喷淋臂91位于接水槽441的正上方。
40.具体的,喷淋臂91的喷孔朝向下方的接水槽441,喷淋臂91喷出的水穿过输送带41并进入到下方的接水槽中。而对于输送带41而言,其带体可以采用网状带子,以方便清洗水流到下方的接水槽441中。
41.其中,底座44上设置有支撑架442,喷淋臂91设置在支撑架442上。具体的,支撑架442呈龙门架结构横跨在输送带41的两侧,进而方便将喷淋臂91架空布置在输送带41的上方。
42.优选地,为了减少在清洗过程中,喷淋臂91喷出的水在冲洗输送带41时水花乱溅,支撑架442的外部还设置有围挡445,围挡445竖向布置。
43.具体的,围挡445竖向布置并分布在输送带41的两侧,在通过喷淋臂91来清洗输送带41时,水撞击输送带41产生水花,水花将被围挡445遮挡以防止水花迸溅到输送带41的两侧。
44.进一步的,由于喷淋臂91的位置固定在输送带41的上方而保持不动,输送带41在清洗时,输送带41的带体将循环运动,这使得带体上的水会滴落到接水槽441的外侧,为此,底座44的上部还设置有延伸部443,延伸部443沿输送带41的输送方向延伸布置。
45.具体的,延伸部443沿输送带的输送方向向前布置来收集输送带41上滴落的水,而在延伸部443上可以设置有导流槽(未标记),所述导流槽连通接水槽441。对于输送带41上滴落的水落入到导流槽中,并通过所述导流槽将水全部导流至接水槽441
46.而为了获得更多的废水存储量,底座44的下部还设置有排水槽444,所述排水槽位于接水槽441的下方并与接水槽441连通。具体的,所述排水槽布置在底座44的底部可以利用所述外壳的底部空间来设置足够大的所述排水槽,同时,所述排水槽配置有排水口以通过排水口连接的排水管向外排放废水。
47.通过在输送带的上方配置喷淋臂,在通过输送带输送垃圾后,输送带会被垃圾遗留的污物所污染,此时,便可以启动喷淋泵,喷淋泵将水箱中的水通过喷淋臂朝向下方的输送带进行喷淋清洗,以实现自动对输送带进行清洗操作,避免输送带长时间粘附污垢而导致输送不畅,与此同时,输送带底部配置的底座上设置有接水槽,喷淋臂喷洒的水淋到输送带上后便落到底部的接水槽中实现污水的统一回收,以避免清理过程中,污水随意流动,方便污水的统一收集和排放,实现自动清洗输送带以提高设备运行可靠性。
48.实施例二、本实用新型还提供一种垃圾回收系统,其包括多个垃圾桶2,垃圾桶2布置在输送带41的外侧并用于盛放垃圾。
49.其中,为了实现对输送带41上输送的垃圾进行自动分拣处理,垃圾回收系统还包括外壳1、第一破袋机构3、输送机构4、分拣机构5。
50.外壳1内部形成安装空间,外壳1上设置有垃圾投放口11; 第一破袋机构3包括第一破袋部件31和第一驱动部件(未图示),所述第一驱动部件用于驱动第一破袋部件31运动以破损垃圾袋;输送机构4包括输送带41,输送带41用于输送从垃圾袋中漏出的垃圾以及破损的垃圾袋;分拣机构5包括图像采集器52、机械手51和控制器,图像采集器52和机械手51布置在输送带41的上方并分别与控制器连接;
51.具体的,垃圾桶2放置在外壳1内部,同时,外壳1内部还设置有第一破袋机构3、输
送机构4和分拣机构5。在实际使用过程中,用户通过垃圾投放口11向外壳1内部投放垃圾,垃圾盛放在垃圾袋中并落到第一破袋机构3处。第一破袋机构3中的第一驱动部件32将驱动第一破袋部件31动作,以实现将垃圾外面的垃圾袋破碎打开,这样,垃圾袋中的垃圾便可以散落出并通过输送带41向前输送。
52.垃圾通过输送带41向前输送过程中,通过图像采集器52对输送带41上的垃圾进行图形识别,控制器则根据图像采集器52采集的图像信息利用图形识别技术以识别出不同垃圾的类型,这样,控制器便可以控制机械手51将对应位置处的垃圾挑拣出并放入到对应的垃圾桶2中。这样,便可以有效的实现不同垃圾的分类,与此同时,对于盛放垃圾的垃圾袋而言,通过第一破袋机构3进行破袋处理后,垃圾袋也可以单独分拣回收,以实现更加全面有效的进行垃圾的分类回收。
53.其中,对于图像采集器52的安装位置,可以与机械手51分别独立安装,即图像采集器52和机械手51沿输送带41的输送方向依次布置,其中,图像采集器52布置在输送带41的首部的上方,对于垃圾袋通过第一破袋机构3进行破袋处理后,垃圾和垃圾袋散落在输送带41上,通过上方的图像采集器52向下拍摄输送带41,来获取图像信息。或者,图像采集器52设置在机械手51上并跟随机械手51一同移动。具体的,图像采集器52能够跟随机械手51一同移动,而在机械手51移动前,先通过图像采集器52采集输送带41上的图像信息,通过控制器进行图像识别处理后再通过机械手51进行不同垃圾的挑选操作。
54.通过在外壳中布置破袋机构和分拣机构,对于从垃圾投放口投入到外壳内的垃圾袋而言,破袋机构将垃圾袋撕破,进而使得垃圾袋中的垃圾漏出并一同落到输送带上,而输送带上的垃圾和垃圾袋在输送过程中,经过图像采集器采集图像信息并通过图像识别技术识别出输送带上的垃圾类型,进而由控制器控制机械手将不同类型的垃圾分别挑拣到不同的垃圾桶中以实现自动分类垃圾,这样,便可以避免用户手动破袋而造成用户被污染以及垃圾遗落到垃圾桶的外部,并且,可以充分有效地的进行垃圾的分类存放,更好地满足城市垃圾有效分类的要求,提高了垃圾回收利用率,并提高了用户体验性。
55.进一步的,输送机构4还包括摊平组件42,所述摊平组件包括摊平平台421和振动器422,振动器422设置在摊平平台421上,摊平平台421布置在输送带41的首部。
56.具体而言,垃圾袋通过第一破袋机构3进行破袋处理后,垃圾以及破损的垃圾袋将先掉落至下方的摊平平台421上,利用掉落产生的冲击将使得垃圾散落在摊平平台421上,然后,利用振动器422进行振动,使得摊平平台421上的垃圾更加充分的分散开以将成堆的垃圾摊平。其中,摊平平台421倾斜向下朝向输送带41方向延伸,这样,在振动器422的作用下,垃圾一方面被摊平处理,另一方面垃圾将逐渐朝向下方的输送带41上移动并跌落到输送带41上。
57.优选地,为了满足对厨余垃圾独立回收投放的要求,在其中一垃圾投放口11的内侧设置有第二破袋机构6,第二破袋机构6包括第二破袋部件61和第二驱动部件(未图示),所述第二驱动部件用于驱动第二破袋部件61运动以破损垃圾袋,第二破袋机构6的下方设置有垃圾桶2。
58.具体的,在实际使用过程中,通常情况下,用户针对生活垃圾能够实现最基本的干湿分类,而对于厨余垃圾而言,通常采用独立的垃圾袋存储。通过配置独立的垃圾投放口11来投放厨余垃圾。盛放厨余垃圾的垃圾袋投入到对应的垃圾投放口11中后,先通过第二破
袋机构6进行破袋处理,以使得垃圾袋中的厨余垃圾散落出并落到下方对应的垃圾桶2中。
59.通过第二破袋机构6将盛放有厨余垃圾的垃圾袋割破,以实现更加有效地单独回收厨余垃圾,避免厨余垃圾盛放在垃圾袋中而导致后期无法进行有氧堆肥和厌氧制沼发电,通过将厨余垃圾从垃圾袋中分理出,可以实现厨余垃圾资源化处理和利用。
60.更进一步的,对于盛放厨余垃圾的垃圾袋而言,虽然该垃圾袋为塑料材质,但是,由于被厨余垃圾污染则无法将该垃圾袋作为可回收垃圾来回收利用,同时,盛放厨余垃圾的垃圾袋也不能随着厨余垃圾一同回收,而需要将垃圾袋单独回收存放在盛放其他垃圾的垃圾桶2中。为此,具有清洗功能的垃圾输送设备还包括:拣袋机构7,拣袋机构7包括移动模块71和夹爪72,夹爪72设置在移动模块71上,移动模块71设置在外壳1中并用于带动夹爪72移动,夹爪72用于夹取第二破袋机构6上的垃圾袋。
61.具体的,用户将盛放厨余垃圾的垃圾袋投入到对应的垃圾投放口11中后,通过第二破袋机构6实现对垃圾袋的破袋处理。而对于垃圾袋而言,可以通过拣袋机构7进行夹持。通过移动模块71将夹爪72移动到垃圾袋的上方,并通过夹爪72夹持住垃圾袋,垃圾袋在破袋处理后,拣袋机构7带动垃圾袋远离底部盛放厨余垃圾的垃圾桶2。以减少破碎垃圾袋混在厨余垃圾中,提高垃圾分类的效果。
62.其中,对于移动模块71的表现实体,可以采用三维移动平台等结构形式,例如:移动模块71包括横向移动件711和纵向移动件712,纵向移动件712设置在横向移动件711的移动部上,夹爪72设置在纵向移动件712的移动部上。在工作过程中,横向移动件711能够带动纵向移动件712横向往复移动,而纵向移动件712能够带动夹爪72上下移动,进而实现夹取垃圾袋并将垃圾袋输送到指定的位置处。
63.其中,对于两个破袋机构而言,破袋部件的表现实体可以采用刀片、铁钩等结构形式,而驱动部件则用于给破袋部件提供动力,使得破袋部件转动或移动以将垃圾袋割破或撕破。例如:以破袋部件为刀片为例,驱动部件则可以采用旋转电机等器件,旋转电机驱动刀片转动,利用刀片将垃圾袋割破以使得垃圾袋中的垃圾脱落出。
64.实施例三、对于外壳1上垃圾投放口11的数量以及垃圾桶2的分布方式,可以采用如下结构形式。外壳1上设置有四个垃圾投放口11,每个垃圾投放口11上设置有可开关的门窗111,门窗111上设置有标识(未标记),垃圾桶2设置在外壳1中并用于存储对应位置处垃圾投放口11投入的垃圾。
65.具体的,为了充分的利用外壳1所占用的空间,并满足国家提倡的四类垃圾分类投放的要求,则可以在外壳1中布置有四个垃圾投放口11,四个垃圾投放口11分别用于供用户投放厨余垃圾、可回收物、有害垃圾和其他垃圾,为此,四个垃圾投放口11分为厨余垃圾投放口、可回收物投放口、有害垃圾投放口和其他垃圾投放口。
66.这在实际使用过程中,利用四个垃圾投放口11的门窗111上对应的配置有标识来指导用户投放垃圾。用户在家中将不同类型的垃圾分类后,便可以从对应的垃圾投放口11中将垃圾投入,而不同类型的垃圾将对应的存储在不同的垃圾桶2中。
67.其中,为了方便用户投放垃圾,一般在外壳1的正面并排布置有四个垃圾投放口11,这样,在用户投放垃圾时,可以在外壳1的前面依次将不同的垃圾投入到对应的垃圾投放口11中。
68.另外,为了方便用户将垃圾袋投入到垃圾投放口11中,提高投放便利性,外壳1的
正面设置有倾斜面10,倾斜面10由上至下朝外倾斜,四个垃圾投放口11位于倾斜面10上。
69.具体的,在外壳1的正面形成倾斜面10来设置垃圾投放口11,垃圾投放口11布置在倾斜面10上,垃圾投放口11整体也是倾斜布置,且垃圾投放口11将从用户侧朝上倾斜延伸,这样,能够方便用户轻易的将垃圾袋投入到垃圾投放口11中,以提高使用便利性。
70.而对于垃圾桶2的的布置位置,相对应的,在外壳1中布置有四个垃圾桶2分为厨余垃圾桶、可回收垃圾桶、有害垃圾桶和其他垃圾桶;其中,所述厨余垃圾桶位于所述厨余垃圾投放口的下方,所述有害垃圾桶位于所述有害垃圾投放口的下方。
71.在垃圾投放过程中,用户能够很好的将厨余垃圾和有害垃圾进行有效彻底的分类,因此,可以在所述厨余垃圾投放口的下方直接配置所述厨余垃圾桶,并在所述有害垃圾投放口的下方直接配置所述有害垃圾桶。用户将厨余垃圾投入到厨余垃圾投放口后,使得厨余垃圾存储在底部的所述厨余垃圾桶中;用户将有害垃圾投入到有害垃圾投放口后,使得有害垃圾存储在底部的有害垃圾桶中。
72.而对于可回收物和其他垃圾,往往容易出现用户分类错误的情况发生,为此,针对可回收物和其他垃圾则可以通过具有清洗功能的垃圾输送设备进行自动挑拣分类。具体的,可回收物或其他垃圾投入到对应的垃圾投放口11后,可回收物或其他垃圾将通过输送带41进行输送,利用机械手51便可以针对不同类型的垃圾进行挑拣处理。
73.而为了方便机械手51将挑拣处的垃圾进行投放,则所述可回收垃圾桶布置在输送带41的一侧,所述其他垃圾桶布置在输送带41的尾部,所述可回收物投放口和所述其他垃圾投放口靠近输送带41的头部。
74.具体的,机械手51将挑拣出的可回收物放入到输送带41一侧的可回收垃圾桶中,而对于输送带41上的其他垃圾将跟随输送带41移动并最终落入到输送带41尾端下方的其他垃圾桶中。
75.其中,对于可回收物和其他垃圾中依然可能存在有害垃圾,如废旧电池等与可回收物或其他垃圾混在一起。同时将所述有害垃圾桶也布置在输送带41的一侧,而垃圾在输送带41上输送过程中,通过机械手51能够将可回收物和有害垃圾分别挑拣出,并利用机械手51将可回收物和有害垃圾放入到输送带41一侧的可回收垃圾桶和有害垃圾桶中。
76.进一步的,为了将从所述可回收物投放口和所述其他垃圾投放口投入的垃圾输送至输送带41上,所述可回收物投放口和所述其他垃圾投放口与输送带41之间分别设置有提升机43。
77.具体的,从所述可回收物投放口和所述其他垃圾投放口投入的垃圾将通过提升机43提升并输送至第一破袋机构3位置处,第一破袋机构3将垃圾袋割破后,垃圾和垃圾袋将掉落至下方的摊平平台421,经由振动器422振动使得摊平平台421上的垃圾和垃圾袋最终摊平在输送带41上进行输送。
78.通过在外壳上配置四个垃圾投放口来分类投放垃圾,并且,每个垃圾投放口对应的配置有独立的垃圾桶来回收盛放垃圾,以满足国家垃圾分类投放的要求,并且,用户在使用过程中,每个垃圾投放口配置的门窗上设置有对应的标识,以方便提示用户投放垃圾,重要的是,垃圾投放口的位置不会发生改变,更有利于用户养成良好的垃圾分类投放习惯,也可以更有效的减少垃圾投放错误的现象发生,实现方便用户准确投放垃圾并提升外观效果以提高用户体验性。
79.进一步的,为了方便后期工作人员清理外壳1中的垃圾桶2,所述厨余垃圾桶、所述可回收垃圾桶和所述有害垃圾桶并排布置在输送带41的一侧。相对应的,外壳1上开设有垃圾清运口12,外壳1上还设置有用于开关垃圾清运口12的门体121,垃圾清运口12位于垃圾投放口11的下方。
80.具体的,沿垃圾清运口12的长度方向,所述厨余垃圾桶、所述可回收垃圾桶和所述有害垃圾桶并排,当垃圾桶2中盛满垃圾时,则可以打开门体121将垃圾桶2从外壳1中取出,以实现采用常规的垃圾桶2来满足垃圾盛放转运的要求。
81.其中,对于所述其他垃圾桶而言,其可以布置在所述厨余垃圾桶的内侧,以充分的利用外壳1内的空间来布置四个垃圾桶2。与此同时,所述厨余垃圾桶和其他垃圾桶前后布置,在使用过程中,对于通过第二破袋机构6破袋后的垃圾袋能够通过拣袋机构7的夹爪72夹持住,移动模块71带动厨余垃圾的垃圾袋移动到所述厨余垃圾桶后方的其他垃圾桶上方,然后,夹爪72释放垃圾袋,以使得垃圾袋落入到其他垃圾桶中,最大限度的提升垃圾分类的精确性。
82.进一步的,外壳1在其中部布置垃圾投放口11,并在垃圾投放口11的下方设置垃圾清运口12,沿垃圾清运口12的长度方向,外壳1中并排布置有多个垃圾桶2能够在打开垃圾清运口12的门体121后,直接从外壳1中拉出。.
83.另外,在垂直于垃圾清运口12所在平面的方向,外壳1中并排也布置有多个垃圾桶2,而为了将垂直于垃圾清运口12平面所布置的两个垃圾桶2方便的装入外壳1中或从外壳1中取出,则还包括拖车架21,拖车架21形成有定位框211,外壳1中远离垃圾清运口12的垃圾桶2位于定位框211中。
84.具体的,当需要将前后布置的垃圾桶2装入到外壳1中时,对于后方的所述垃圾桶则通过拖车架21将该所述垃圾桶推入到外壳1的内部,然后,在前方的所述垃圾桶在推到拖车架21的前部区域。相反的,当需要将所述垃圾桶取出时,则先将前侧的所述垃圾桶拉出,再通过拖车架21将后方的所述垃圾桶从外壳1中取出。其中,拖车架21靠近垃圾清运口12的端部设置有把手212,以方便操作人员使用拖车架21。
85.实施例四、基于上述技术方案,可选的,由于所述垃圾桶放置在相对密闭的所述外壳中,而所述垃圾桶中的垃圾容易发生腐烂而产生严重的异味,为了减少所述垃圾桶中的垃圾产生异味,则在所述外壳中配置喷淋机构8,喷淋机构8包括药剂箱、药剂泵和喷淋管81,所述药剂箱通过所述药剂泵与喷淋管81连接,喷淋管81上设置有朝向所述垃圾桶方向喷射的喷嘴,喷淋管81设置在所述外壳中。
86.具体的,所述外壳中,产生异味严重的主要是盛放厨余垃圾的所述垃圾桶,为此,在节约成本角度出发,可以在用于盛放厨余垃圾的所述垃圾桶上方配置喷淋机构8,当然,可以根据实际需要,在盛放其他垃圾的所述垃圾桶上方也配置喷淋机构8,或者,在所述外壳中的每个所述垃圾桶的上方均配置有喷淋机构8。
87.以下,以在盛放厨余垃圾的所述垃圾桶上方配置喷淋机构8为例进行说明。在厨余垃圾投放到所述垃圾桶中后,所述药剂泵动作,将所述药剂箱中的药剂抽出并通过喷淋管81向所述垃圾桶喷淋药剂,其中,药剂的种类可以有多种,例如可以采用常用的抑菌剂、em菌等,以减缓厨余垃圾在所述垃圾桶中发酵,进而减少气味的产生同时起到抑菌的作用。
88.其中,喷淋管81布置在垃圾投放口11的下方,喷淋管81并排布置有多个所述喷嘴。
具体的,用户将厨余垃圾从对应的垃圾投放口11投入到下方的所述垃圾桶后,位于垃圾投放口11下方的喷淋管81便及时的向所述垃圾桶中喷淋药剂。
89.另外,为了使得喷出的药剂能够有效地覆盖所述垃圾桶的横截面区域,喷淋管81可转动的设置在所述外壳上。具体的,在喷淋过程中,喷淋管81能够转动,进而使得所述喷嘴能以摆动的方式喷淋药剂,使得所述垃圾桶中获得均匀的喷淋。而为了方便安装喷淋管81以满足其转动的要求,所述外壳上设置有两个轴承座(未图示),所述轴承座中设置有轴承(未图示),喷淋管81的端部设置在对应的所述轴承中。并且,为了实现喷淋管81转动喷淋,喷淋机构8还可以配置有电机或旋转气缸来驱动喷淋管81转动。
90.实施例五、对于用户在投放垃圾而言,为了减少用户手动操作以减少用户在投放垃圾时手被污染,则对于垃圾投放口11上配置的门窗111可以采用电动驱动的方式实现自动开关。为此,所述外壳中还设置有用于驱动门窗111开关的电动驱动器(未图示);每个垃圾投放口11配置有对应的人感器13,人感器13和所述电动驱动器分别与控制器连接。
91.具体的,人感器13在检测到信号后触发控制器控制对应的所述电动驱动器驱动门窗111打开。当用户靠近垃圾投放口11准备投递垃圾时,该垃圾投放口11对应的人感器13将检测到信号,控制器将根据人感器13检测到的信号触发对应的门窗111的所述电动驱动器通电动作,以使得对应门窗111自动打开,而无需用户手动开关门窗111,有效的提高了用户体验性。
92.进一步的,所述外壳的内壁还设置有多个导向滑槽14,导向滑槽14与对应的垃圾投放口11连接。
93.具体的,用户将垃圾袋从垃圾投放口11投入到所述外壳内部后,垃圾袋将沿着导向滑槽14向下滑动并落入到对应的所述垃圾桶中。其中,导向滑槽14倾斜朝向下方的所述垃圾桶方向延伸,垃圾袋在重力的作用下能够沿着倾斜向下延伸的导向滑槽14滑动,并最终滑入到下方的所述垃圾桶中。
94.进一步的,对于电动驱动器的表现实体可以有多种结构形式,同时,门窗111开门的方式也有多种形式。
95.例如:门窗111采用滑动打开的方式,则门窗111可滑动的设置在所述外壳上,所述电动驱动器为电动推杆,所述电动推杆与门窗111连接。
96.或者,门窗111采用旋转打开的方式,则门窗111可转动的设置在所述外壳上,所述电动驱动器为电动推杆,所述电动推杆与门窗111连接。
97.另外,对于垃圾投放口11下方的垃圾清运口12而言,其上配置的门体121一般采用手工方式进行打开以降低制造成本,而为了方便操作人员打开门体121,门体121上部的两端部设置有铰接轴,所述铰接轴可转动的设置在所述外壳上。具体的,门体121采用上翻转的方式打开,操作人员在操作时,拉动门体121的下部以使得门体121绕铰接轴转动,实现向上翻转打开。
98.通过在外壳上配置多个垃圾投放口,并针对每个垃圾投放口上配置独立的人感器,当用户走到对应的垃圾投放口投放垃圾时,该垃圾投放口对应的人感器将检测到用户走进并触发控制器来控制对应的门窗自动打开,用户仅需要将垃圾经由垃圾投放口投入到外壳中的垃圾桶中而无需自动手动打开垃圾桶的桶盖,与此同时,外壳上设置有垃圾清运口来满足垃圾桶进出外壳的要求,从而可以采用常规小区中配置的垃圾桶在外壳中收集垃
圾而无需特殊设计垃圾桶,提高了垃圾桶的使用通用性,通过人感器自动开关门体以方便用户投放垃圾,提高了使用卫生性和用户体验性。
99.以上仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1